También podría gustarte
- Recetas Cocina UntarDocumento13 páginasRecetas Cocina UntarFrancisco Navarro MartinezAún no hay calificaciones
- Team Flip FlopDocumento15 páginasTeam Flip FlopFrancisco Navarro MartinezAún no hay calificaciones
- Ejercicios de WordDocumento26 páginasEjercicios de WordYO MismaAún no hay calificaciones
- Cos TaleroDocumento1 páginaCos TaleroFrancisco Navarro MartinezAún no hay calificaciones
- Torre AljambraDocumento25 páginasTorre AljambraFrancisco Navarro MartinezAún no hay calificaciones
- PDF AT PsDocumento46 páginasPDF AT PsFrancisco Navarro MartinezAún no hay calificaciones
- Aromas Ilicitanos TUBADocumento1 páginaAromas Ilicitanos TUBAFrancisco Navarro MartinezAún no hay calificaciones
- Números Hasta El 600 RepasoDocumento3 páginasNúmeros Hasta El 600 RepasoFrancisco Navarro MartinezAún no hay calificaciones
- Examen Final JavascriptDocumento1 páginaExamen Final JavascriptFrancisco Navarro MartinezAún no hay calificaciones
- 214 910 1 PBDocumento21 páginas214 910 1 PBFrancisco Navarro MartinezAún no hay calificaciones
- Colección de Problemas para 2º de PrimariaDocumento24 páginasColección de Problemas para 2º de Primariaxeonx69Aún no hay calificaciones
- Administración ReMotaDocumento28 páginasAdministración ReMotaOmar Eduardo Betanzos MartinezAún no hay calificaciones
- Word Intro InternetDocumento2 páginasWord Intro InternetSaul ZeballosAún no hay calificaciones
- Dialnet PrecipitacionesYAvenidasEnAlmeriaDuranteElPeriodoN 105566 PDFDocumento16 páginasDialnet PrecipitacionesYAvenidasEnAlmeriaDuranteElPeriodoN 105566 PDFFrancisco Navarro MartinezAún no hay calificaciones
- Introduccion Equipos y Sistemas InformaticosDocumento55 páginasIntroduccion Equipos y Sistemas InformaticosFrancisco Navarro MartinezAún no hay calificaciones
- Jornada Puertas AbiertasDocumento1 páginaJornada Puertas AbiertasFrancisco Navarro MartinezAún no hay calificaciones
- Tema1 Introducion Libro Robotica EducativaDocumento53 páginasTema1 Introducion Libro Robotica EducativaFrancisco Navarro MartinezAún no hay calificaciones
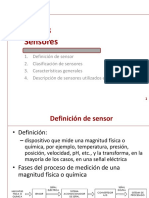
- Clase SensoresDocumento24 páginasClase SensoresgzegoviaAún no hay calificaciones
- Juegos de Lógica y Estrategia PDFDocumento13 páginasJuegos de Lógica y Estrategia PDFpercy_lujánAún no hay calificaciones
- 2.2.1-Robot de SumoDocumento6 páginas2.2.1-Robot de SumoFrancisco Navarro MartinezAún no hay calificaciones
- 7 CinemáticaDocumento22 páginas7 CinemáticaRonny CedeñoAún no hay calificaciones
- 321 Manual de Robotica Educativa en El Aula PDFDocumento215 páginas321 Manual de Robotica Educativa en El Aula PDFBriz de Escobar67% (3)
- 2 1 2-ActuadoresDocumento2 páginas2 1 2-ActuadoresFrancisco Navarro MartinezAún no hay calificaciones
- Libro Cocina Saludable 2011 FinalDocumento148 páginasLibro Cocina Saludable 2011 FinalNelsonLeonardoSánchez83% (6)
- Modelo de AcuerdoDocumento2 páginasModelo de AcuerdoFrancisco Navarro MartinezAún no hay calificaciones
- Va011 Cuaderno Caligrafia Verano 2016 PDFDocumento18 páginasVa011 Cuaderno Caligrafia Verano 2016 PDFFrancisco Navarro MartinezAún no hay calificaciones
- Orden Andalucia SMRDocumento31 páginasOrden Andalucia SMRAnonymous xPkGh94G6IAún no hay calificaciones
- Módulo2 Actividad4Documento3 páginasMódulo2 Actividad4Francisco Navarro MartinezAún no hay calificaciones
- Lógica Con Cubos 01 SOL PDFDocumento1 páginaLógica Con Cubos 01 SOL PDFFrancisco Navarro MartinezAún no hay calificaciones
- Algebra VectDocumento12 páginasAlgebra VectJOSE ALBERTO QUINTANA SOLISAún no hay calificaciones
- CuadraticasDocumento33 páginasCuadraticasLuis LopezAún no hay calificaciones
- Curva de Masa - Diagrama de RIPPLDocumento4 páginasCurva de Masa - Diagrama de RIPPLJimmy Harry Contreras Aguirre100% (1)
- Suma de VectoresDocumento7 páginasSuma de VectoreseleuterioromeropeAún no hay calificaciones
- Caminos IDocumento16 páginasCaminos IkattyAún no hay calificaciones
- Formulario PreuniversitarioDocumento126 páginasFormulario PreuniversitarioDario Al Congreso67% (3)
- Coordenadas Polares y Movimiento ParabolicoDocumento9 páginasCoordenadas Polares y Movimiento Parabolico.Aún no hay calificaciones
- Unidad Temática 3Documento7 páginasUnidad Temática 3Bernardo Alberto Vargas VidalAún no hay calificaciones
- Ensayos de Consolidacion Unidimensional de Los SuelosDocumento9 páginasEnsayos de Consolidacion Unidimensional de Los SuelosJonas Vera0% (1)
- TrigonometríaDocumento22 páginasTrigonometríaJessica Sanchez QuispeAún no hay calificaciones
- plANEACION 2Documento8 páginasplANEACION 2YiYe ValenciaAún no hay calificaciones
- SuperficiesDocumento119 páginasSuperficiesJosé AbantoAún no hay calificaciones
- República Bolivariana de VenezuelaDocumento9 páginasRepública Bolivariana de Venezuelayerivi cabarcasAún no hay calificaciones
- Frecuencia de Tormentas IVDocumento14 páginasFrecuencia de Tormentas IVCristian Alexis Benavente RománAún no hay calificaciones
- Matematicas para La AdministracionDocumento30 páginasMatematicas para La AdministracionOlgaLuciaVinzaPortillaAún no hay calificaciones
- Ecuacion de La Recta Nuevo Formato.Documento8 páginasEcuacion de La Recta Nuevo Formato.ismael rodriguezAún no hay calificaciones
- 1 - Vectores en El Plano y El EspacioDocumento54 páginas1 - Vectores en El Plano y El EspacioMili JacobiAún no hay calificaciones
- Guia de Curvas de TransicionDocumento33 páginasGuia de Curvas de TransicionandreinaAún no hay calificaciones
- Informe y TallerDocumento11 páginasInforme y TallerJair Andres ROLDAN TORRES0% (1)
- Transformaciones BidimencionalesDocumento11 páginasTransformaciones Bidimencionalesraza binariaAún no hay calificaciones
- Practica 3 U3 DAPCDocumento28 páginasPractica 3 U3 DAPCRicardo GomezAún no hay calificaciones
- Polares Parte 1Documento7 páginasPolares Parte 1finnaventureAún no hay calificaciones
- FuncionesDocumento17 páginasFuncionesMalw Dark94% (18)
- Rectas Paralelas y PerpendicularesDocumento33 páginasRectas Paralelas y PerpendicularesCarmen BalladaresAún no hay calificaciones
- Topografia y Su Aplicacion en La Ingenieria Civil de La Ciudad de IcaDocumento30 páginasTopografia y Su Aplicacion en La Ingenieria Civil de La Ciudad de IcaChristian Del Aguila0% (1)
- Funcion Lineal ExplicacionDocumento3 páginasFuncion Lineal ExplicacionAdriana MancipeAún no hay calificaciones
- Ilovepdf MergedDocumento173 páginasIlovepdf MergedHector Adrian Torrez BautistaAún no hay calificaciones
- Ficha 4 - 1ero - Eda6Documento3 páginasFicha 4 - 1ero - Eda6Roberth RojasAún no hay calificaciones
- Paraboloide ElípticoDocumento4 páginasParaboloide ElípticoGabriela MexAún no hay calificaciones
- S.01. Analisis de PosicionDocumento40 páginasS.01. Analisis de PosicionSteve BryamAún no hay calificaciones