También podría gustarte
- Linea Del Tiempo Estudio Dificultedes de AprendizajeDocumento2 páginasLinea Del Tiempo Estudio Dificultedes de AprendizajeLuis Enrique80% (15)
- Reseña A "Las Migajas de Nuestra Mesa"... Elba Raquel de Los SantosDocumento1 páginaReseña A "Las Migajas de Nuestra Mesa"... Elba Raquel de Los Santosdoctorseisdedos33% (3)
- Resumen de Modelo Ecosistémico BronfenbrennerDocumento5 páginasResumen de Modelo Ecosistémico BronfenbrennerCAMILA ISIDORA ESPERANZA MELLADO MADARIAGAAún no hay calificaciones
- Informe de Flor )Documento9 páginasInforme de Flor )Karen Paola Pelufo PeñaAún no hay calificaciones
- 8 Augusto Carranza PDFDocumento35 páginas8 Augusto Carranza PDFJuvenal Quispe PumaAún no hay calificaciones
- Formato de Ficha de Observación Juez ExpertoDocumento2 páginasFormato de Ficha de Observación Juez ExpertoSebastián VarelaAún no hay calificaciones
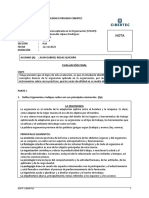
- Evaluacion Final Ergonomía Aplicada en La Organización (SP4639) - I4JADocumento12 páginasEvaluacion Final Ergonomía Aplicada en La Organización (SP4639) - I4JAGabriel RosasAún no hay calificaciones
- V de Gowin 3practicaDocumento1 páginaV de Gowin 3practicaMaria Jose Olivero CarrascalAún no hay calificaciones
- La Piramide - SarmientoDocumento4 páginasLa Piramide - SarmientosdfsfsAún no hay calificaciones
- Séptimo 1Documento6 páginasSéptimo 1annier cordoba gonzalezAún no hay calificaciones
- Estatutos Agrosolidaria Mas Camara de Comercio.Documento33 páginasEstatutos Agrosolidaria Mas Camara de Comercio.Carlos Ivan CamargoAún no hay calificaciones
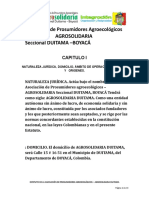
- Capitulo 1Documento21 páginasCapitulo 1Christian Augusto100% (1)
- Esquema de Portafolio Andres Bello 2020 IIDocumento2 páginasEsquema de Portafolio Andres Bello 2020 IISahara Maron CalsinAún no hay calificaciones
- Principios Regulatorios Del PresupuestoDocumento3 páginasPrincipios Regulatorios Del PresupuestoJose Luis Rodriguez100% (2)
- Capitulo 15 BioquimicaDocumento8 páginasCapitulo 15 BioquimicaElianeAún no hay calificaciones
- 02 REINTERPRETACION GENERO TEMA ICONOG X 1 PDFDocumento112 páginas02 REINTERPRETACION GENERO TEMA ICONOG X 1 PDFBibix AltamarAún no hay calificaciones
- Generalidades de Los LíquidosDocumento3 páginasGeneralidades de Los LíquidosMaria Jose Rodriguez GaonaAún no hay calificaciones
- PRÁCTICA 1. Los Materiales Clasificacion y CaracteristicasDocumento13 páginasPRÁCTICA 1. Los Materiales Clasificacion y CaracteristicasAlejandro OrtegaAún no hay calificaciones
- Mapa Conceptual Buho de MinervaDocumento1 páginaMapa Conceptual Buho de MinervaCaro Soto100% (1)
- Glosario Gaete M.J & Parra, F.Documento18 páginasGlosario Gaete M.J & Parra, F.Florencia ParraAún no hay calificaciones
- Trabajo Colaborativo - Grupo 403025 - 115Documento18 páginasTrabajo Colaborativo - Grupo 403025 - 115Cristina RodriguezAún no hay calificaciones
- 63-0605 Uno Más Grande Que Salomón Está Aquí HubDocumento143 páginas63-0605 Uno Más Grande Que Salomón Está Aquí HubaguiluchoAún no hay calificaciones
- 005384D Guia Oliver TwistDocumento20 páginas005384D Guia Oliver TwistZoraida Alvarez Pozas100% (4)
- Entrevista y Prueba Psicotecnica Sura-Copy (2) - Copy-Copy (1) - Copy-Copy-Copy-Copy-Copy-Copy (7) - Copy-1Documento5 páginasEntrevista y Prueba Psicotecnica Sura-Copy (2) - Copy-Copy (1) - Copy-Copy-Copy-Copy-Copy-Copy (7) - Copy-1Vienna Michelle Álvarez OsorioAún no hay calificaciones
- El Diario de Ana Frank PruebaDocumento5 páginasEl Diario de Ana Frank PruebaelenaAún no hay calificaciones
- El Arte Comprometido en España en Los 70 y 80Documento798 páginasEl Arte Comprometido en España en Los 70 y 80rocksie100% (1)
- 1trabajo Final SafDocumento295 páginas1trabajo Final SafYesicaOrdóñezAún no hay calificaciones
- Presentación Clase Identificación 2017Documento19 páginasPresentación Clase Identificación 2017Romina BrugmanAún no hay calificaciones
- 2da Entrega Excel Taller FinancieroDocumento20 páginas2da Entrega Excel Taller Financierocristina100% (1)
- RetrogamingDocumento4 páginasRetrogamingcieloAún no hay calificaciones