También podría gustarte
- Logica CableadaDocumento5 páginasLogica CableadaEdward PeraltaAún no hay calificaciones
- Ejercicios Automatismos Electricos Espinosa - VarelaDocumento16 páginasEjercicios Automatismos Electricos Espinosa - Varelafabo varela100% (3)
- Calculo de Instalacion Industrial - ComercialDocumento73 páginasCalculo de Instalacion Industrial - ComercialIsrael Josue100% (1)
- Proyecto de NavidadDocumento12 páginasProyecto de NavidadLuis LirAún no hay calificaciones
- Funciones Logicas Cade SimuDocumento4 páginasFunciones Logicas Cade SimuAndrea Monserrat Escalante ArratiaAún no hay calificaciones
- Protección DiferencialDocumento65 páginasProtección DiferencialAlex M.P.Aún no hay calificaciones
- Control de Maquinas ElectricasDocumento48 páginasControl de Maquinas ElectricasNelzon Naveros LoaAún no hay calificaciones
- Cuaderno Practicas1 PDFDocumento111 páginasCuaderno Practicas1 PDFfranAún no hay calificaciones
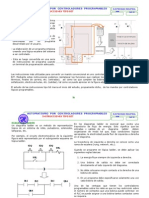
- Automatización Por Lógica Cableada.Documento10 páginasAutomatización Por Lógica Cableada.Armando Palacios MaximilianoAún no hay calificaciones
- Ejercicio 4 de AutomatismosDocumento2 páginasEjercicio 4 de AutomatismosAntonio Herrerías SanabriaAún no hay calificaciones
- 5 B Programacion de PLC 1Documento25 páginas5 B Programacion de PLC 1Chamo Pobre BatracioAún no hay calificaciones
- Tema 1. Electricidad y ElectrónicaDocumento70 páginasTema 1. Electricidad y ElectrónicaE&G0% (1)
- 1.2. PLC Ejercicios InicialesDocumento6 páginas1.2. PLC Ejercicios InicialessaulAún no hay calificaciones
- Guia de Laboratorio. PLC LogoDocumento4 páginasGuia de Laboratorio. PLC LogoLuis LaraAún no hay calificaciones
- Instalaciones Electricas I - 0 PDFDocumento14 páginasInstalaciones Electricas I - 0 PDFJulio Fernando Antezana Hinojosa100% (1)
- Tema I Instalaciones Eléctricas IndustrialesDocumento9 páginasTema I Instalaciones Eléctricas IndustrialesJuan Eduardo GarciaAún no hay calificaciones
- BinodoDocumento30 páginasBinodoJUANJAUNAún no hay calificaciones
- Manual Programacion Sinumerik 810 TDocumento24 páginasManual Programacion Sinumerik 810 TRoberto Rosas Menaya50% (2)
- Instalaciones ElectricasDocumento23 páginasInstalaciones ElectricasCindy Jennifer Valle Mercedes100% (1)
- Sistemas Secuenciales 1 PDFDocumento86 páginasSistemas Secuenciales 1 PDFJuan Diego Márquez ChávezAún no hay calificaciones
- Circuitos Eléctricos Mcgraw HillDocumento27 páginasCircuitos Eléctricos Mcgraw HillInma CortésAún no hay calificaciones
- Tutorial Cade Simu PDFDocumento49 páginasTutorial Cade Simu PDFArturo BetancourtAún no hay calificaciones
- Tesla Logo Marca 2008Documento6 páginasTesla Logo Marca 2008Liam JJ0% (1)
- EjerciciosDocumento6 páginasEjerciciosFrancisco de Paula González Rodríguez0% (1)
- Preguntas Teoricas Final ElectricidadDocumento6 páginasPreguntas Teoricas Final ElectricidadGiovany Lipe Caso100% (1)
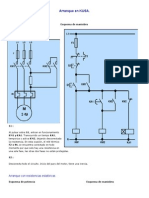
- Arranque en KUSADocumento3 páginasArranque en KUSAReyner Loza0% (1)
- Presentacion PLC EatonDocumento14 páginasPresentacion PLC EatonArismendy de Jesus Estevez NuñezAún no hay calificaciones
- LivewireDocumento3 páginasLivewireTamAún no hay calificaciones
- Diseño de Circuitos Con Puertas LógicasDocumento39 páginasDiseño de Circuitos Con Puertas LógicasJosé Miguel Díaz0% (1)
- Motor Trifásico de Arranque LentoDocumento4 páginasMotor Trifásico de Arranque Lentojulio pinoAún no hay calificaciones
- Tableros ElectricosDocumento37 páginasTableros ElectricosRoy SPAún no hay calificaciones
- Automatismos Basicos 2016 - 8Documento18 páginasAutomatismos Basicos 2016 - 8franco jorqueraAún no hay calificaciones
- Lógica Combinacional de Contactos y RelésDocumento12 páginasLógica Combinacional de Contactos y RelésMiguel Andres Cardenas VegaAún no hay calificaciones
- Conexionado Central Incendios..Documento2 páginasConexionado Central Incendios..José Luis Casarrubios UcedaAún no hay calificaciones
- CONTENIDOcontrol de Motor 24vDocumento26 páginasCONTENIDOcontrol de Motor 24vEliud IslasAún no hay calificaciones
- Lectura Sensores IndustrialesDocumento8 páginasLectura Sensores IndustrialesAlan D David LlanosAún no hay calificaciones
- Automatismos, Autómatas y Control IndustrialDocumento60 páginasAutomatismos, Autómatas y Control IndustrialPaul Jacome Freund100% (1)
- Electro NeumaticaDocumento64 páginasElectro NeumaticaCarlos Felipe Jimenez CedilloAún no hay calificaciones
- Componentes de ControlDocumento31 páginasComponentes de ControlalvaritoignacioAún no hay calificaciones
- Familia Logica TTL-ResumenDocumento4 páginasFamilia Logica TTL-Resumenpepeluis666Aún no hay calificaciones
- Digitalizacion de SeñalesDocumento9 páginasDigitalizacion de SeñalesCamila Erazo FigueroaAún no hay calificaciones
- Practicas de ElectrotecniaDocumento77 páginasPracticas de ElectrotecniaLambertoAún no hay calificaciones
- Tesla Logo Bit 2008Documento26 páginasTesla Logo Bit 2008Liam JJAún no hay calificaciones
- Esquemas Electricos PracticasDocumento78 páginasEsquemas Electricos PracticasDiego de la FuenteAún no hay calificaciones
- F Microplc Guardamotor PDFDocumento4 páginasF Microplc Guardamotor PDFJavier SalasAún no hay calificaciones
- Aplicacion de La Teoria BinodalDocumento104 páginasAplicacion de La Teoria Binodalalfredo100% (1)
- 3 SEMA OK 30 DIIAP OK Lógica CableadaDocumento32 páginas3 SEMA OK 30 DIIAP OK Lógica CableadaJason Jaime Mamani CruzAún no hay calificaciones
- Manual de Practicas Tableros Inst - ElectricasDocumento8 páginasManual de Practicas Tableros Inst - ElectricasJuan RiveraAún no hay calificaciones
- Dispositivos de Proteccion - Instalacion ElectricaDocumento2 páginasDispositivos de Proteccion - Instalacion ElectricaManuel 47Aún no hay calificaciones
- Curso Auxiliar de Electricista en Instalaciones Electricas Domiciliarias - Munigestion 2021 - Lautaro PazDocumento5 páginasCurso Auxiliar de Electricista en Instalaciones Electricas Domiciliarias - Munigestion 2021 - Lautaro PazGrisel Imhoff100% (1)
- Aparatos y Artefactos ElectricosDocumento34 páginasAparatos y Artefactos Electricosjazmin zegarraAún no hay calificaciones
- 2 Guia2 LogixproDocumento6 páginas2 Guia2 LogixproLuis Fernando Pariona MartinezAún no hay calificaciones
- Motores en SecuenciaDocumento17 páginasMotores en SecuenciaDavid Omar Mateo LopezAún no hay calificaciones
- Compuertas LógicasDocumento24 páginasCompuertas LógicassanchezbernardojefersonAún no hay calificaciones
- UNIDAD 2 - Modulo 1 TeoDocumento55 páginasUNIDAD 2 - Modulo 1 TeoaacaceresAún no hay calificaciones
- Diseo Digital 3Documento13 páginasDiseo Digital 3reyna isabel cob gomezAún no hay calificaciones
- Los Circuitos LógicosDocumento10 páginasLos Circuitos LógicosAmanda KaufmannAún no hay calificaciones
- Compuertas Logicas y Algebra BooleanaDocumento10 páginasCompuertas Logicas y Algebra BooleanaKEVINAún no hay calificaciones
- Sistemas de ControlDocumento14 páginasSistemas de ControlAlexander PaucarAún no hay calificaciones
- LabSDLunV2-30,31,37-E8-P0-Int Al LaboratorioDocumento12 páginasLabSDLunV2-30,31,37-E8-P0-Int Al LaboratorioAngel CastilloAún no hay calificaciones
- 1 UNIDAD 1 TIPOS DE ARRANQUE - Arranque DirectoDocumento20 páginas1 UNIDAD 1 TIPOS DE ARRANQUE - Arranque DirectoArnaldo González CantilloAún no hay calificaciones
- Ejercicios Calculo de ComponentesDocumento1 páginaEjercicios Calculo de ComponentesArnaldo González CantilloAún no hay calificaciones
- Guia Inv Arranque EscalonadoDocumento3 páginasGuia Inv Arranque EscalonadoArnaldo González CantilloAún no hay calificaciones
- Rubrica Arranque Estrella Triangulo TableroDocumento2 páginasRubrica Arranque Estrella Triangulo TableroArnaldo González CantilloAún no hay calificaciones
- 1 MagnetismoDocumento17 páginas1 MagnetismoArnaldo González CantilloAún no hay calificaciones
- Unidad 2Documento6 páginasUnidad 2Arnaldo González CantilloAún no hay calificaciones
- Taller Contabilidad FinancieraDocumento5 páginasTaller Contabilidad FinancieraDanyHernandezMoreloAún no hay calificaciones
- Datos Centros de Acopio y AlamacenamientoDocumento8 páginasDatos Centros de Acopio y AlamacenamientoIsabella Cardona SernaAún no hay calificaciones
- Crisis Transporte IOPDocumento2 páginasCrisis Transporte IOPAndrea Margarita Osorio LopezAún no hay calificaciones
- Guía Rápida de Configuración ConnectAlarm Comunicadores v4.XXDocumento3 páginasGuía Rápida de Configuración ConnectAlarm Comunicadores v4.XXulises aguilarAún no hay calificaciones
- Acta de Entrega Huacahuasi DerechoDocumento2 páginasActa de Entrega Huacahuasi DerechoIvan Mamani MermaAún no hay calificaciones
- ErgonomiaDocumento14 páginasErgonomiaVictoria Bernilla CamposAún no hay calificaciones
- Modelo CanvasDocumento38 páginasModelo CanvasTania TellezAún no hay calificaciones
- Rectificadores No ControladosDocumento2 páginasRectificadores No ControladosAnonymous dN4xTIQAún no hay calificaciones
- Tarea 1. Diagrama de Flujo PGIRS - Daniela C.Documento5 páginasTarea 1. Diagrama de Flujo PGIRS - Daniela C.Daniela CastilloAún no hay calificaciones
- Gestión Diferencial de Recursos HumanosDocumento13 páginasGestión Diferencial de Recursos HumanosIvan YamithAún no hay calificaciones
- Actividad 4Documento62 páginasActividad 4Aurora Lucia TORRES GOMEZAún no hay calificaciones
- Modulo 1 Arranque ExplosivoDocumento20 páginasModulo 1 Arranque ExplosivoELIAS EMILIO GARCIA CASTILLOAún no hay calificaciones
- Crema Lavavajilla Sapolio-Informe Técnico V2Documento3 páginasCrema Lavavajilla Sapolio-Informe Técnico V2Perez Nicaragua HanyluAún no hay calificaciones
- BoletinesDocumento720 páginasBoletinespepitito2267% (3)
- Proyecto de InversionDocumento68 páginasProyecto de InversionCristell Martinez100% (2)
- MOVIMIENTOSDocumento16 páginasMOVIMIENTOSbrunojesiAún no hay calificaciones
- Compañías de Bombas en PanamaDocumento20 páginasCompañías de Bombas en PanamaJuanJoseFuentesAún no hay calificaciones
- MSDS Cherteston 274Documento8 páginasMSDS Cherteston 274Italo JaureguiAún no hay calificaciones
- Practica 5Documento14 páginasPractica 5Daniel S. NavaAún no hay calificaciones
- Muebles Rusticos-Sistema de Pólizas-Ejercicio 2Documento2 páginasMuebles Rusticos-Sistema de Pólizas-Ejercicio 2Azucena CauichAún no hay calificaciones
- YorokobuDocumento100 páginasYorokobujosedora1100% (1)
- Recetas de Galletas PDFDocumento144 páginasRecetas de Galletas PDFGenesis Angelina Lacruz Dugarte100% (1)
- Intro Windows10Documento20 páginasIntro Windows10juan Gomez GonzalesAún no hay calificaciones
- Teoria NeoclasicaDocumento6 páginasTeoria NeoclasicaAsslan HernandezAún no hay calificaciones
- Informe Segunda Generacion de MantenimientoDocumento5 páginasInforme Segunda Generacion de MantenimientoJaime CuasqueAún no hay calificaciones
- Coca Cola TrabajoDocumento6 páginasCoca Cola TrabajoYomaira BeltranAún no hay calificaciones
- Cuadernillo de Actividades Módulo 1 TetraDocumento7 páginasCuadernillo de Actividades Módulo 1 TetraRaphael Lopez0% (2)
- Documento 29Documento11 páginasDocumento 29NeZqUiKAún no hay calificaciones
- C.C. Casa Hab. AsuncionDocumento24 páginasC.C. Casa Hab. AsuncionChristian Iván Martínez RochaAún no hay calificaciones
- Curriculum Profesor 07Documento1 páginaCurriculum Profesor 07mher001Aún no hay calificaciones