También podría gustarte
- Diapositivas Proyecto de Gas DomiciliarioDocumento42 páginasDiapositivas Proyecto de Gas DomiciliarioMaher Vasquez50% (2)
- Resumen Formulas Fisica IDocumento2 páginasResumen Formulas Fisica Iintegralclases91% (44)
- Conexión de Impedancias en Paralelo y en Serie AltavocesDocumento3 páginasConexión de Impedancias en Paralelo y en Serie AltavocesBocha PonceAún no hay calificaciones
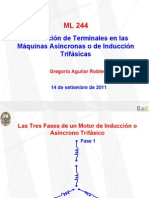
- Numeración de Terminales en Las Máquinas Asíncronas o de Inducción TrifásicasDocumento36 páginasNumeración de Terminales en Las Máquinas Asíncronas o de Inducción TrifásicasRubensaiD100% (2)
- Investigacion y Ciencia 404 Mayo 2010Documento97 páginasInvestigacion y Ciencia 404 Mayo 2010txikitxo1980100% (1)
- HidraúlicaDocumento114 páginasHidraúlicaAbian DavilaAún no hay calificaciones
- Reporte de La Practica 2Documento14 páginasReporte de La Practica 2Marco MeraAún no hay calificaciones
- Audi Niveldeacete Description SSP 233 E2 PDFDocumento18 páginasAudi Niveldeacete Description SSP 233 E2 PDFmmmAún no hay calificaciones
- CENSO 2010 ChimborazoDocumento21 páginasCENSO 2010 ChimborazoPao VieraAún no hay calificaciones
- Ingeniería en Procesos. Unidad 4 - ErgonomíaDocumento18 páginasIngeniería en Procesos. Unidad 4 - ErgonomíaSthefanie Von Duben Ordoñez100% (1)
- Fase 5 Riesgo Mecánico y EléctricoDocumento10 páginasFase 5 Riesgo Mecánico y Eléctricoerika Ramos suarezAún no hay calificaciones
- Manual at ReferenciaDocumento11 páginasManual at ReferenciaBATIPLANE S.R.L.Aún no hay calificaciones
- Examen CIENCIAS Bloque 2 TelesecundariaDocumento3 páginasExamen CIENCIAS Bloque 2 TelesecundariaBelgica Beltran MoralesAún no hay calificaciones
- Ficha 1 TermodinamicaDocumento5 páginasFicha 1 TermodinamicaMolly MckinnonAún no hay calificaciones
- Glosario Eia - Pma-LaDocumento8 páginasGlosario Eia - Pma-LaIMAGNEAún no hay calificaciones
- Sesion 9Documento32 páginasSesion 9Jorge Gonzales del SolarAún no hay calificaciones
- Tpn3 GasesDocumento7 páginasTpn3 GasesCzr WmAún no hay calificaciones
- Artículo - El AutotransformadorDocumento11 páginasArtículo - El AutotransformadorkarlangazAún no hay calificaciones
- Suspended Permanent CP SPANISHDocumento39 páginasSuspended Permanent CP SPANISHAlfonso TabuencaAún no hay calificaciones
- Cambio ClimaticoDocumento12 páginasCambio ClimaticoFernando NarvaezAún no hay calificaciones
- Ecuaciones Diferenciales de La Curvatura de Deflexión.Documento11 páginasEcuaciones Diferenciales de La Curvatura de Deflexión.Erick ArmasAún no hay calificaciones
- Mantenimiento Preventivo Camion Volvo FL6EDocumento13 páginasMantenimiento Preventivo Camion Volvo FL6EwalterAún no hay calificaciones
- Física Semana 5 PDocumento7 páginasFísica Semana 5 Pfelix NuñezAún no hay calificaciones
- Capitulo 5 Conclusiones y RecomendacionesDocumento4 páginasCapitulo 5 Conclusiones y RecomendacionesNorian MichueAún no hay calificaciones
- Manuales de Electricidad IndustrialDocumento2 páginasManuales de Electricidad IndustrialFrancisco AndresAún no hay calificaciones
- Soldar Con Soldadura Por Arco Eléctrico Con GasDocumento10 páginasSoldar Con Soldadura Por Arco Eléctrico Con GasJean carlos Patala sanchezAún no hay calificaciones
- Contaminación Ambiental, Lluvia ÁcidaDocumento6 páginasContaminación Ambiental, Lluvia Ácidasamilati11Aún no hay calificaciones
- Manual Del Motor Cd20 NissanDocumento206 páginasManual Del Motor Cd20 NissanJunior DíazAún no hay calificaciones
- Resumen HidrologiaDocumento7 páginasResumen HidrologiaalonsoAún no hay calificaciones
- EWS Training - Material - 13 Soda Ash - 2 Soda Ash System Maintenance - ES PDFDocumento29 páginasEWS Training - Material - 13 Soda Ash - 2 Soda Ash System Maintenance - ES PDFCristian VegaAún no hay calificaciones