También podría gustarte
- Ficha ConceptualizaciónDocumento2 páginasFicha ConceptualizaciónMaria Fernanda GonzálezAún no hay calificaciones
- Normas APA Sexta Edición PDFDocumento21 páginasNormas APA Sexta Edición PDFBuffon BravoAún no hay calificaciones
- Proyectos Empresariales Con MS ProjectDocumento266 páginasProyectos Empresariales Con MS ProjectLuis CPAún no hay calificaciones
- El Acero Inoxidable 2205Documento2 páginasEl Acero Inoxidable 2205Maria Fernanda GonzálezAún no hay calificaciones
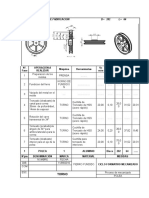
- Hojadeprocesospolea 140728195058 Phpapp02Documento2 páginasHojadeprocesospolea 140728195058 Phpapp02Maria Fernanda GonzálezAún no hay calificaciones
- Modelo Pedagogico SocialDocumento3 páginasModelo Pedagogico SocialMaria Fernanda González100% (1)
- Calculo de Engranajes de Dientes RectosDocumento24 páginasCalculo de Engranajes de Dientes RectosAndres Alexander Silvestre80% (10)
- Los Aceros Inoxidables AusteníticosDocumento2 páginasLos Aceros Inoxidables AusteníticosMaria Fernanda GonzálezAún no hay calificaciones
- La Materia y Los MaterialesDocumento7 páginasLa Materia y Los MaterialesMaria Fernanda GonzálezAún no hay calificaciones
- ErgonomiaDocumento6 páginasErgonomiaLuciana TrimanoAún no hay calificaciones
- Lectura ESTILOS DE ENSEÑANZA Y MODELOS PEDAGÓGICOS PDFDocumento134 páginasLectura ESTILOS DE ENSEÑANZA Y MODELOS PEDAGÓGICOS PDFAnonymous mv84nhzAún no hay calificaciones
- ASOCIACIONISMODocumento1 páginaASOCIACIONISMOMaria Fernanda GonzálezAún no hay calificaciones
- Leyes de GestaltDocumento5 páginasLeyes de GestaltRicardo GarciaAún no hay calificaciones
- Trabajo Practico de Eoi-1-1Documento5 páginasTrabajo Practico de Eoi-1-1Malena CaramelloAún no hay calificaciones
- Evaluacion de Informatica AplicadaDocumento3 páginasEvaluacion de Informatica AplicadaJessy SanchezAún no hay calificaciones
- Inteligencia Artificial: Historia y AplicacionesDocumento10 páginasInteligencia Artificial: Historia y AplicacionesMarcela QuirogaAún no hay calificaciones
- Chat LIZDocumento45 páginasChat LIZJmp ReneAún no hay calificaciones
- Sebastian Caimanque Control7Documento6 páginasSebastian Caimanque Control7Sebastian GonzálezAún no hay calificaciones
- Espacios ConfinadosDocumento84 páginasEspacios Confinadosjj100% (1)
- TEMASDocumento3 páginasTEMASjuan carlos apaza gutierrezAún no hay calificaciones
- Uso de ChatgptDocumento11 páginasUso de ChatgptMarco Fernando Duich MedranoAún no hay calificaciones
- Domotica Con Packet Tracer 3Documento13 páginasDomotica Con Packet Tracer 3Juan RobertoAún no hay calificaciones
- Impacto de Una Comunicación Efectiva en La Gestión de TecnologíaDocumento13 páginasImpacto de Una Comunicación Efectiva en La Gestión de TecnologíaCHOMINA FERNANDEZ ILDEFONSOAún no hay calificaciones
- Aprendizaje automático: Estado actual y aplicacionesDocumento4 páginasAprendizaje automático: Estado actual y aplicacionesDanielMuñozAún no hay calificaciones
- Artificial Intelligence BCHDocumento9 páginasArtificial Intelligence BCHcugarAún no hay calificaciones
- Formato ReseñaDocumento5 páginasFormato ReseñaMarco3086Aún no hay calificaciones
- Carles Lindin IA ChatGPT Educacion DD EspDocumento81 páginasCarles Lindin IA ChatGPT Educacion DD EspFany Leticia Suárez SumAún no hay calificaciones
- Compendio Libro FilosofiaDocumento23 páginasCompendio Libro FilosofiaMonica RodriguezAún no hay calificaciones
- Anaxagoras, NOUSDocumento8 páginasAnaxagoras, NOUSMisabiduriaAún no hay calificaciones
- Introducción Inteligencia ArtificialDocumento2 páginasIntroducción Inteligencia ArtificialLu RamirezAún no hay calificaciones
- Apuntes Electrónicos Unidad 4 Inteligencia ArtificialDocumento15 páginasApuntes Electrónicos Unidad 4 Inteligencia ArtificialLuis Rdz NavaAún no hay calificaciones
- Memoria Ris4Documento73 páginasMemoria Ris4Miguel De HaroAún no hay calificaciones
- IA en La Religión MundialDocumento2 páginasIA en La Religión MundialGloria GonzalezAún no hay calificaciones
- IA en fonoaudiología y logísticaDocumento7 páginasIA en fonoaudiología y logísticaYulieth Andrea Pizza vargasAún no hay calificaciones
- Memory VendettaDocumento13 páginasMemory VendettaGabrielAún no hay calificaciones
- El Problema de La Libertad en KantDocumento18 páginasEl Problema de La Libertad en KantJuan Carlos Spinoza100% (1)
- Los 4 Pilares de La Ecuacion Cap. 3 4Documento5 páginasLos 4 Pilares de La Ecuacion Cap. 3 4Ruben Figueroa HernandezAún no hay calificaciones
- Tarea Virtual 1Documento5 páginasTarea Virtual 1Sof LiveAún no hay calificaciones
- Organizaciones Inteligentes según Peter SengeDocumento30 páginasOrganizaciones Inteligentes según Peter SengeEdithsdelcAún no hay calificaciones
- Acerca de IntouchcxDocumento2 páginasAcerca de IntouchcxYekaheba KHAún no hay calificaciones
- E-Book - Inteligencia ArtificialDocumento8 páginasE-Book - Inteligencia ArtificialSergioVegaAún no hay calificaciones
- T2 - Comunicación 2 - Grupo 14Documento7 páginasT2 - Comunicación 2 - Grupo 14Salvatore Ramirez RichardsonAún no hay calificaciones