También podría gustarte
- Cuestionario - Subgrafos e Isomorfismo - Revisión Del Intento DISCRETADocumento5 páginasCuestionario - Subgrafos e Isomorfismo - Revisión Del Intento DISCRETAEmi LoyolaAún no hay calificaciones
- Variedades LinealesDocumento18 páginasVariedades LinealesbraikapoAún no hay calificaciones
- RecopilaciónDocumento11 páginasRecopilaciónJs JandalAún no hay calificaciones
- Preguntas Álgebra 16-05Documento9 páginasPreguntas Álgebra 16-05Jose Alberto Agapito AyastaAún no hay calificaciones
- TRABAJODocumento8 páginasTRABAJOAbel A. Domínguez50% (2)
- Caso de FactorizaciónDocumento5 páginasCaso de Factorizaciónalexander rojasAún no hay calificaciones
- Algebra LinealDocumento165 páginasAlgebra Linealtoony reyesAún no hay calificaciones
- Teoremas de La CircunferenciaDocumento39 páginasTeoremas de La CircunferenciaTAYLOR111GENUS100% (1)
- Demostración Del Enunciado de Playfair Análogo Al Quinto Postulado de Euclides (Con Autor)Documento10 páginasDemostración Del Enunciado de Playfair Análogo Al Quinto Postulado de Euclides (Con Autor)Rodolfo Nieves0% (1)
- Producto de CauchyDocumento4 páginasProducto de CauchyCristhian RamirezAún no hay calificaciones
- Matematica Matriz 3Documento5 páginasMatematica Matriz 3Liceth Ballesteros FuentesAún no hay calificaciones
- Taller para Acción de Mejoramiento 2PDocumento2 páginasTaller para Acción de Mejoramiento 2PCESAR JULIAN CORDOBA TORRESAún no hay calificaciones
- SOLUCIONARIO DE Estudio Dirigido #01 Variable Aleatoria Bidimensional CLAUDIA BRAVODocumento35 páginasSOLUCIONARIO DE Estudio Dirigido #01 Variable Aleatoria Bidimensional CLAUDIA BRAVOMaria Fernanda Salazar SilvaAún no hay calificaciones
- Guía Práctica N 11 ECUACIÓN DE SEGUNDO GRADO Y FUNCIÓN CUADRÁTICADocumento20 páginasGuía Práctica N 11 ECUACIÓN DE SEGUNDO GRADO Y FUNCIÓN CUADRÁTICAMarco Pitriqueo TorresAún no hay calificaciones
- Trabajo ProbabilidadDocumento18 páginasTrabajo ProbabilidadYalde RangelAún no hay calificaciones
- PDFDocumento10 páginasPDFJuanAún no hay calificaciones
- Guia de Ejercicios Prueba 2 Esp. Vect.Documento7 páginasGuia de Ejercicios Prueba 2 Esp. Vect.Franco Gnecco GonzálezAún no hay calificaciones
- Demostracion 2Documento25 páginasDemostracion 2Walter Torres MontesAún no hay calificaciones
- Lamina-22 Funciones (2016) - PRODocumento2 páginasLamina-22 Funciones (2016) - PROSindy Aracely Severino DiazAún no hay calificaciones
- AMIcap 3Documento40 páginasAMIcap 3Hernan BacciAún no hay calificaciones
- Ej. PSU Logaritmos y Función Logarítmica PDFDocumento8 páginasEj. PSU Logaritmos y Función Logarítmica PDFDaniela MansillaAún no hay calificaciones
- Ejercicios Producto Interno (Algebra Lineal)Documento4 páginasEjercicios Producto Interno (Algebra Lineal)Jose TorresAún no hay calificaciones
- Problemas de Probabilidad 2Documento9 páginasProblemas de Probabilidad 2Moises BetancortAún no hay calificaciones
- AplicacionesDocumento4 páginasAplicacionesReginald CharlesAún no hay calificaciones
- Capitulo 1Documento8 páginasCapitulo 1StefaniaAún no hay calificaciones
- Trabajo Práctico #1: LimiteDocumento14 páginasTrabajo Práctico #1: Limitegracielaandreani1580100% (1)
- Guia Funciones AlternativaDocumento4 páginasGuia Funciones AlternativaJaime TobarAún no hay calificaciones
- Cuadernillo de La ESPEDocumento7 páginasCuadernillo de La ESPEalexamontteroAún no hay calificaciones
- 2m U3.2 Funcion CuadraticaDocumento88 páginas2m U3.2 Funcion CuadraticaRocio Alvarez Suarez100% (1)
- Espacio BidimensionalDocumento58 páginasEspacio BidimensionalRichard Romero SembreraAún no hay calificaciones
- Binomio de Newton PDFDocumento23 páginasBinomio de Newton PDFAnonymous oBNTCCbS80% (5)
- Guia N 1 Grado Decimo. Longitud de Arco 1 PDFDocumento5 páginasGuia N 1 Grado Decimo. Longitud de Arco 1 PDFyolman CamachoAún no hay calificaciones
- Marquen Con Una CruzDocumento9 páginasMarquen Con Una Cruzyamila_12Aún no hay calificaciones
- Aplicaciones de Las Exp y Los LogDocumento3 páginasAplicaciones de Las Exp y Los LogMarcelinoFigueroaLealAún no hay calificaciones
- Ficha Lineas Notables Segundo AñoDocumento8 páginasFicha Lineas Notables Segundo AñoBryan el proAún no hay calificaciones
- Proposiciones Apuntes de Mate Emy CompletoDocumento100 páginasProposiciones Apuntes de Mate Emy CompletoEmiliaGuacho100% (1)
- Espacios VectorialesDocumento10 páginasEspacios VectorialesDavid Sergio QuispeAún no hay calificaciones
- Caso de Estudio 3 - Taller Grupal - G2 - P3Documento29 páginasCaso de Estudio 3 - Taller Grupal - G2 - P3Joel LoachaminAún no hay calificaciones
- Cocientes NotablesDocumento4 páginasCocientes NotablesEdison Orbea50% (2)
- Identidades TrigonométricasDocumento4 páginasIdentidades TrigonométricasJuan100% (1)
- 21 ARYA Resp-OK - Pearson PDFDocumento40 páginas21 ARYA Resp-OK - Pearson PDFOlga Lucia Martinez HoyosAún no hay calificaciones
- Olimpiada Colombiana de Matematica UniversitariaDocumento1 páginaOlimpiada Colombiana de Matematica UniversitariajfmarquesAún no hay calificaciones
- Numeros ComplejosDocumento36 páginasNumeros Complejosx-menbeastAún no hay calificaciones
- EJERCICIOS CAPÍTULO 1 SiDocumento8 páginasEJERCICIOS CAPÍTULO 1 Sicarlos alberto gomez tunarosaAún no hay calificaciones
- Capitulo 2: Relaciones y FuncionesDocumento35 páginasCapitulo 2: Relaciones y FuncionesConstanza J. Pinto FernándezAún no hay calificaciones
- Relacion de EquivalenciaDocumento3 páginasRelacion de EquivalenciaJordyn Cordova AlvaradoAún no hay calificaciones
- Folleto 2 Técnicas de ConteoDocumento10 páginasFolleto 2 Técnicas de ConteoRonald AriasAún no hay calificaciones
- Cuestionario de Preguntas-CalculoDocumento6 páginasCuestionario de Preguntas-Calculotitoman01Aún no hay calificaciones
- Permutaciones y CombinacionesDocumento11 páginasPermutaciones y CombinacionesEdwin Reyes Guzman100% (1)
- Taller 07 - Coeficientes Indeterminados, Variacion de Parametros PDFDocumento3 páginasTaller 07 - Coeficientes Indeterminados, Variacion de Parametros PDFMaryelys Donado100% (1)
- Funcion CubicaDocumento2 páginasFuncion CubicacarlosahqAún no hay calificaciones
- Ejercicios Análisis Matemático ESFMDocumento6 páginasEjercicios Análisis Matemático ESFMCésar HerreraAún no hay calificaciones
- Deber Predicados, Logica y Teoria de ConjuntosDocumento2 páginasDeber Predicados, Logica y Teoria de ConjuntosLUIS VICENTE VALDIVIESO OROZCOAún no hay calificaciones
- Evidencia TCDocumento14 páginasEvidencia TCLuis Alberto CLAún no hay calificaciones
- 4.1 El Espacio Dual de Un Espacio VectorialDocumento11 páginas4.1 El Espacio Dual de Un Espacio VectorialJavier Diaz100% (1)
- Espacio Dual 1Documento6 páginasEspacio Dual 1Matemáticas BetanzosAún no hay calificaciones
- VyVP Fing-2Documento100 páginasVyVP Fing-2antonela nogueiraAún no hay calificaciones
- Multiline AlDocumento13 páginasMultiline AlManuel FranciscoAún no hay calificaciones
- TensoresDocumento21 páginasTensoresPolanskyAún no hay calificaciones
- Formas BilinealesDocumento15 páginasFormas BilinealesPANDAAún no hay calificaciones
- RSD - Social Intelligence - Vibing by TylerDocumento6 páginasRSD - Social Intelligence - Vibing by TyleralanvergaraAún no hay calificaciones
- Bimferénciate Especialista3DDocumento15 páginasBimferénciate Especialista3DMiguel SambranoAún no hay calificaciones
- José Ortega y Gasset: Filosof IaDocumento40 páginasJosé Ortega y Gasset: Filosof IaCristian ReyesAún no hay calificaciones
- Plan de Trabajo de Adulto MayorDocumento23 páginasPlan de Trabajo de Adulto MayorVERONICA CAROLINA BRIONES POMPAAún no hay calificaciones
- Camino de VidaDocumento51 páginasCamino de VidaMartha MarulandaAún no hay calificaciones
- Estudio de La Cuenca Del ChaccoDocumento61 páginasEstudio de La Cuenca Del ChaccoJuan Carlos Mendoza CoelloAún no hay calificaciones
- Titulo de Credito Hipotecario NegociableDocumento13 páginasTitulo de Credito Hipotecario NegociableCinthia Meléndez100% (1)
- Análisis TextualDocumento4 páginasAnálisis TextualivcarAún no hay calificaciones
- Respeto A Las MinoriasDocumento1 páginaRespeto A Las Minoriascordovacruz19Aún no hay calificaciones
- Evaluacion Textos InformativosDocumento4 páginasEvaluacion Textos Informativosmorin100% (3)
- Estudios Hidrologico Puente CbbaDocumento143 páginasEstudios Hidrologico Puente CbbaJhilmar AlcocerAún no hay calificaciones
- Guia de Intervencion de Enfermeria en Pacientes Con AcvDocumento9 páginasGuia de Intervencion de Enfermeria en Pacientes Con AcvLucero Ramos ÑiquenAún no hay calificaciones
- Ska Revista BíblicaDocumento114 páginasSka Revista BíblicaRivero Machuca100% (4)
- Guía de Maternidad, Hipertensión en El EmbarazoDocumento18 páginasGuía de Maternidad, Hipertensión en El EmbarazoAna MarcelaAún no hay calificaciones
- Modelo de Análisis de Un PoemaDocumento5 páginasModelo de Análisis de Un Poemacamilo fernandezAún no hay calificaciones
- 1° INFORME: Identificación de CarbohidratosDocumento10 páginas1° INFORME: Identificación de CarbohidratosHarold González RamírezAún no hay calificaciones
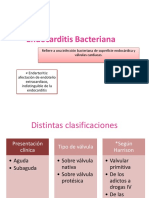
- Endocarditis Bacteriana: Refiere A Una Infección Bacteriana de Superficie Endocárdica y Válvulas CardiacasDocumento20 páginasEndocarditis Bacteriana: Refiere A Una Infección Bacteriana de Superficie Endocárdica y Válvulas CardiacasluisAún no hay calificaciones
- Monografia de Modeloa AtomicosDocumento29 páginasMonografia de Modeloa AtomicosRider Adexe Machuca Sacha100% (2)
- ProgramaDocumento2 páginasProgramasofia cespedes vargasAún no hay calificaciones
- Entrevista PolarDocumento3 páginasEntrevista PolarAdrian Elias Boconello RiveraAún no hay calificaciones
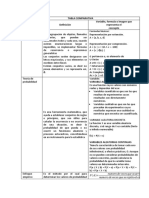
- Tabla ComparativaDocumento5 páginasTabla ComparativaJhonathan VargasAún no hay calificaciones
- Formacion Docente Paulo FreireDocumento16 páginasFormacion Docente Paulo FreireAndrea Reynaga100% (1)
- Soluciones de La Relación de Muestreo EstratificadoDocumento11 páginasSoluciones de La Relación de Muestreo EstratificadoDenís ChicoAún no hay calificaciones
- Cadenas TróficasDocumento4 páginasCadenas TróficasLeonardo PichardoAún no hay calificaciones
- 7.artritis Idiopática JuvenilDocumento35 páginas7.artritis Idiopática JuvenilJS FloresAún no hay calificaciones
- Historia Clinica Basado en OftalmologiaDocumento5 páginasHistoria Clinica Basado en Oftalmologiapolydjainer princeAún no hay calificaciones
- Borda, Guillermo A. - Tratado de Derecho Civil - Sucesiones - Tomo I PDFDocumento495 páginasBorda, Guillermo A. - Tratado de Derecho Civil - Sucesiones - Tomo I PDFJavi Clop96% (24)
- Informe de Quimica 2 Laboratorio # 4Documento21 páginasInforme de Quimica 2 Laboratorio # 4alfredoAún no hay calificaciones
- Competencias Parentales y Trastornos de Personalidad Según Modelo DSM VDocumento58 páginasCompetencias Parentales y Trastornos de Personalidad Según Modelo DSM VjfrojasinfanteAún no hay calificaciones
- En El Cuerpo Humano Existen 208 HuesosDocumento3 páginasEn El Cuerpo Humano Existen 208 HuesosConny EpuntoCeAún no hay calificaciones