También podría gustarte
- Estudio Hidrologico de HuachisDocumento8 páginasEstudio Hidrologico de HuachisAnaly García SotoAún no hay calificaciones
- El Paralaje: Desde Hiparco hasta la era espacialDe EverandEl Paralaje: Desde Hiparco hasta la era espacialAún no hay calificaciones
- Ubicación y Coordenadas GeograficasDocumento12 páginasUbicación y Coordenadas GeograficasCRISTHIAN VEGA MORENOAún no hay calificaciones
- La Forma de La Tierra y El Datum 2014Documento15 páginasLa Forma de La Tierra y El Datum 2014Luis Tinoco LacayoAún no hay calificaciones
- Republica Dominicana: Universidad InceDocumento24 páginasRepublica Dominicana: Universidad InceJuan Jose Garcia RivasAún no hay calificaciones
- Universo: La inmensidad del cosmos en la palma de tu manoDe EverandUniverso: La inmensidad del cosmos en la palma de tu manoDiego Merino SanchoAún no hay calificaciones
- Memoria de GnssDocumento52 páginasMemoria de Gnssjesus sosa bandalaAún no hay calificaciones
- Historia breve del Universo: Del Big Bang hasta nuestros díasDe EverandHistoria breve del Universo: Del Big Bang hasta nuestros díasAún no hay calificaciones
- 1ra ppt-GEODESIADocumento48 páginas1ra ppt-GEODESIAReyde Ayerve100% (1)
- Introduccion GPSDocumento67 páginasIntroduccion GPSClaurimar Medina QuinteroAún no hay calificaciones
- Ciencias de La Medida de La TierraDocumento21 páginasCiencias de La Medida de La TierrageomacAún no hay calificaciones
- Resumen VideoDocumento5 páginasResumen VideoGerardo TejedaAún no hay calificaciones
- GEODESIADocumento34 páginasGEODESIAFotogrametria Topografia100% (2)
- 2 Geodesia Figuras TierraDocumento5 páginas2 Geodesia Figuras TierraMary Cruz LadinoAún no hay calificaciones
- Manual CursoDocumento20 páginasManual CursoronaldoAún no hay calificaciones
- Ambiental y Aplicación ArgiDocumento2 páginasAmbiental y Aplicación ArgiKai YuanAún no hay calificaciones
- ELIPSOIDEDocumento4 páginasELIPSOIDEJorge Caipani AltamiranoAún no hay calificaciones
- Geodesia - TeoriaDocumento20 páginasGeodesia - TeoriaYovanka RodriguezAún no hay calificaciones
- 06 Geodesia PDFDocumento23 páginas06 Geodesia PDFRicardoAún no hay calificaciones
- Principios de GeodesiaDocumento7 páginasPrincipios de GeodesiaArturo R M PérezAún no hay calificaciones
- GeografíaDocumento23 páginasGeografíaROYER FFAún no hay calificaciones
- Tema 1 Geodesia SatelitalDocumento29 páginasTema 1 Geodesia SatelitalDeyvi GarciaAún no hay calificaciones
- Geodesia IDocumento82 páginasGeodesia Igriblim allsAún no hay calificaciones
- Apuntes Toporgafia y GeodesiaDocumento88 páginasApuntes Toporgafia y GeodesiaSebastian Huerta Ferrada100% (1)
- Desarrollo de Clase Geodesia SatelitalDocumento69 páginasDesarrollo de Clase Geodesia SatelitalKaRiNaAún no hay calificaciones
- Cartografía y Geodesia. Sistemas de ProyecciónDocumento25 páginasCartografía y Geodesia. Sistemas de ProyecciónCRISTIAN BENAVENTE BRISTOLAún no hay calificaciones
- Introducción A La Cartografía (Presentación) Autor Gobierno de Santa FeDocumento26 páginasIntroducción A La Cartografía (Presentación) Autor Gobierno de Santa Fedemapo5826Aún no hay calificaciones
- Geodesia IDocumento20 páginasGeodesia IRobert TineoAún no hay calificaciones
- La Tierra Como EsferoideDocumento13 páginasLa Tierra Como EsferoideMary CabezaAún no hay calificaciones
- Cartografia Dany 2020Documento24 páginasCartografia Dany 2020CARLOSAún no hay calificaciones
- Forma de La TierraDocumento2 páginasForma de La TierraLasso Juan100% (1)
- La Forma de La TierraDocumento3 páginasLa Forma de La Tierraclara97Aún no hay calificaciones
- Georreferenciación y UtmDocumento51 páginasGeorreferenciación y UtmFRECIA LOURDES CHURA ANAHUAAún no hay calificaciones
- Que Es GeoideDocumento10 páginasQue Es GeoideRoberto Huanacchiri RodriguezAún no hay calificaciones
- GEODESIADocumento83 páginasGEODESIAJhonErickHuayhuaNinaAún no hay calificaciones
- Capítulo II. Representación de La Tierra en Un Plano 2.1. Forma de La TierraDocumento33 páginasCapítulo II. Representación de La Tierra en Un Plano 2.1. Forma de La TierracindytamayoAún no hay calificaciones
- Elipsoide de ReferenciaDocumento6 páginasElipsoide de ReferenciaRoyer Alex Mamani CalderonAún no hay calificaciones
- Tarea IiiDocumento9 páginasTarea IiiJuan Jose Garcia RivasAún no hay calificaciones
- Geodesia Satelital ListoDocumento119 páginasGeodesia Satelital ListoRafael Fernandez BorjaAún no hay calificaciones
- Guia Geografia DiegoDocumento11 páginasGuia Geografia DiegoRAULAún no hay calificaciones
- Geodesia I UMSADocumento31 páginasGeodesia I UMSAFranzer AdnarimAún no hay calificaciones
- Las Ciencias de La Medida de La TierraDocumento23 páginasLas Ciencias de La Medida de La TierraRic MichAún no hay calificaciones
- Sistema de ReferenciaDocumento28 páginasSistema de ReferenciaJEISON JESITH VERDECIA VARGASAún no hay calificaciones
- Resumen de TopografiaDocumento16 páginasResumen de Topografiasofia rojasAún no hay calificaciones
- Clase - 1 Nociones de TopografíaDocumento32 páginasClase - 1 Nociones de TopografíaOscar LeninAún no hay calificaciones
- GeodesiaDocumento66 páginasGeodesiaPavelHuamanPancorboAún no hay calificaciones
- Navegacion Costera y Estima UmcDocumento61 páginasNavegacion Costera y Estima UmcGeremi CovaAún no hay calificaciones
- Unidad 1Documento29 páginasUnidad 1Rivera CarfAún no hay calificaciones
- Sistema de Coordenadas de Un Elemento GeográficoDocumento32 páginasSistema de Coordenadas de Un Elemento GeográficoLuciana MendozaAún no hay calificaciones
- Trabajo SencicoDocumento49 páginasTrabajo SencicoTA JubertAún no hay calificaciones
- GEODESIADocumento22 páginasGEODESIAMaria100% (1)
- Representación Del Espacio GeográficoDocumento4 páginasRepresentación Del Espacio Geográficojose gabriel cristaldoAún no hay calificaciones
- Geodesia Concepto Intro 20 0Documento45 páginasGeodesia Concepto Intro 20 0Edwin CcahuayaAún no hay calificaciones
- DATUMDocumento5 páginasDATUMJulio PillacaAún no hay calificaciones
- Topografia Ii Coordenadas UtmDocumento51 páginasTopografia Ii Coordenadas UtmGodfrey Florez HuillcaAún no hay calificaciones
- Geo Posicion Amien ToDocumento16 páginasGeo Posicion Amien ToRubén Darío Hernández VillarrealAún no hay calificaciones
- Dainis Franco Primera Presentación Asignación 1er Tema Geog FisicaDocumento20 páginasDainis Franco Primera Presentación Asignación 1er Tema Geog FisicaAlejandra FrancoAún no hay calificaciones
- Poesía Colón, Bocas y DariénDocumento3 páginasPoesía Colón, Bocas y DariénCristina TrejosAún no hay calificaciones
- Laraos - Reserva Paisajística Nor Yauyos Cochas - Atractivos TurísticosDocumento2 páginasLaraos - Reserva Paisajística Nor Yauyos Cochas - Atractivos Turísticososcar damianAún no hay calificaciones
- Actividad 7Documento5 páginasActividad 7Juan cesar SantanderAún no hay calificaciones
- GHC - Prof, Juan VasquezDocumento11 páginasGHC - Prof, Juan VasquezDanyAún no hay calificaciones
- La GeografiaDocumento3 páginasLa Geografiajose luis oscco injanteAún no hay calificaciones
- Sentinel NorteDocumento2 páginasSentinel NortesalbridoAún no hay calificaciones
- Ubicacion Predio Urquillos-Huayllabamba-UrubambaDocumento1 páginaUbicacion Predio Urquillos-Huayllabamba-UrubambaJUAN BASCO LOVATON LOAIZAAún no hay calificaciones
- Que Es La Geografía Física y HumanaDocumento15 páginasQue Es La Geografía Física y Humanajose david lopezAún no hay calificaciones
- Semestral San Marcos - Geografía Semana 06Documento24 páginasSemestral San Marcos - Geografía Semana 06Henry Araujo SalasAún no hay calificaciones
- Las Tres Quebradas - Lote 02 - A3Documento1 páginaLas Tres Quebradas - Lote 02 - A3Blas Panka NinaAún no hay calificaciones
- Geog. de SD (EDS-423 - Trim) Cuad Act. Unidad 2.Documento5 páginasGeog. de SD (EDS-423 - Trim) Cuad Act. Unidad 2.Sujeiry MateoAún no hay calificaciones
- Informe Hidrologico Hidraulico Puente Cantuta - RevDDocumento173 páginasInforme Hidrologico Hidraulico Puente Cantuta - RevDricardoAún no hay calificaciones
- Evaluación de La Amenaza y Vulnerabilidad Por Erosion Costera en El Departamento de NariñoDocumento33 páginasEvaluación de La Amenaza y Vulnerabilidad Por Erosion Costera en El Departamento de NariñoSoy tu aliadoAún no hay calificaciones
- Marco Teorico - LevantamientoDocumento5 páginasMarco Teorico - LevantamientoJessica Lizet COLLAZOS JARAMILLOAún no hay calificaciones
- Informe Hidrologico Achacachi Zona SurDocumento67 páginasInforme Hidrologico Achacachi Zona SurMiguel Angel Cespedes RiosAún no hay calificaciones
- Barrios y Veredas Del Municipio de ValenciaDocumento4 páginasBarrios y Veredas Del Municipio de ValenciaJulioelias Senado Valencia CórdobaAún no hay calificaciones
- Los Barbaros y El Feudalismo-1Documento12 páginasLos Barbaros y El Feudalismo-1Nilson RamírezAún no hay calificaciones
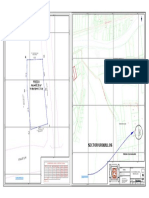
- Plano Perimetro Y AREA REMANENTE-Layout1Documento1 páginaPlano Perimetro Y AREA REMANENTE-Layout1percy meza ramonAún no hay calificaciones
- Evaluacion Los RomanosDocumento4 páginasEvaluacion Los RomanosMónica GómezAún no hay calificaciones
- Prueba Quinto Básico A La Conquista Española de AméricaDocumento1 páginaPrueba Quinto Básico A La Conquista Española de Américabelen2612Aún no hay calificaciones
- Ejercicio Puntos y ComasDocumento2 páginasEjercicio Puntos y ComasSara MezquiticAún no hay calificaciones
- El Tejido Urbano Tradicional en El Centro Historico de Xela PDFDocumento48 páginasEl Tejido Urbano Tradicional en El Centro Historico de Xela PDFAsdrubaldguzAún no hay calificaciones
- Guia de Sociales PrimariaDocumento7 páginasGuia de Sociales PrimariaAriana Alejandra Ortiz plazasAún no hay calificaciones
- Copia de Trabajo de Investigación Sobre Qatar y Su MundialDocumento3 páginasCopia de Trabajo de Investigación Sobre Qatar y Su MundialKiko 2.0Aún no hay calificaciones
- Catalogo TuristicoDocumento62 páginasCatalogo TuristicoMarco Aurelio Fernandez Baca GaldosAún no hay calificaciones
- Tarea 2 - Encuesta A 3 AgrimensoresDocumento6 páginasTarea 2 - Encuesta A 3 AgrimensoresGabriel José Santana AcostaAún no hay calificaciones
- Seminario de Urbanismo IiDocumento8 páginasSeminario de Urbanismo IiMiguel JesusiAún no hay calificaciones
- Planeacion. de La Cartografia A La Riqueza de MexicoDocumento10 páginasPlaneacion. de La Cartografia A La Riqueza de MexicoAngie Sarai Hernandez AvalosAún no hay calificaciones
- Topography Unit TumeremoDocumento2 páginasTopography Unit TumeremoJuan Carlos SanchezAún no hay calificaciones
- Química para geología: Aplicación en laboratorio y campoDe EverandQuímica para geología: Aplicación en laboratorio y campoCalificación: 4.5 de 5 estrellas4.5/5 (10)
- SIG de la A a la Z: Diccionario ilustrado de los sistemas de información geográficaDe EverandSIG de la A a la Z: Diccionario ilustrado de los sistemas de información geográficaCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Conciencia del tiempo: Por qué pensar como geólogos puede ayudarnos a salvar el planetaDe EverandConciencia del tiempo: Por qué pensar como geólogos puede ayudarnos a salvar el planetaCalificación: 4.5 de 5 estrellas4.5/5 (2)
- La magia de los números: 136 recreaciones aritméticas y geométricasDe EverandLa magia de los números: 136 recreaciones aritméticas y geométricasCalificación: 1 de 5 estrellas1/5 (1)
- Configuración y usos de un mapa de procesosDe EverandConfiguración y usos de un mapa de procesosCalificación: 4.5 de 5 estrellas4.5/5 (18)
- Cara a cara con el planeta: Una nueva mirada sobre el cambio climático alejada de las posiciones apocalípticasDe EverandCara a cara con el planeta: Una nueva mirada sobre el cambio climático alejada de las posiciones apocalípticasCalificación: 3.5 de 5 estrellas3.5/5 (3)
- Geomática Tecnologías De Punta: 1ª EdiciónDe EverandGeomática Tecnologías De Punta: 1ª EdiciónCalificación: 4 de 5 estrellas4/5 (3)
- Guerra Espiritual contra los Principados del PecadoDe EverandGuerra Espiritual contra los Principados del PecadoCalificación: 5 de 5 estrellas5/5 (2)
- Matemáticas básicas para economistas. Vol. 0. Fundamentos (Con notas históricas y contextos económicos)De EverandMatemáticas básicas para economistas. Vol. 0. Fundamentos (Con notas históricas y contextos económicos)Aún no hay calificaciones
- Diseño urbano bioclimático: Modelado y simulación digitalDe EverandDiseño urbano bioclimático: Modelado y simulación digitalAún no hay calificaciones
- Sistemas de Información Geográfica. Aplicaciones en diagnósticos territoriales... 2ª Ed. Ac: Geografía física y topografíaDe EverandSistemas de Información Geográfica. Aplicaciones en diagnósticos territoriales... 2ª Ed. Ac: Geografía física y topografíaCalificación: 3 de 5 estrellas3/5 (2)
- Introducción a la geometría (2ª edición)De EverandIntroducción a la geometría (2ª edición)Calificación: 5 de 5 estrellas5/5 (1)
- La engañosa sencillez de los triángulos: De la fórmula de Herón a la criptografíaDe EverandLa engañosa sencillez de los triángulos: De la fórmula de Herón a la criptografíaAún no hay calificaciones
- Viaje al centro de la Tierra: Volcanes, terremotos, minería, basura, diamantes y petróleo explicados por la geologíaDe EverandViaje al centro de la Tierra: Volcanes, terremotos, minería, basura, diamantes y petróleo explicados por la geologíaCalificación: 5 de 5 estrellas5/5 (3)
- Transformaciones en geometría euclidiana y no euclidianaDe EverandTransformaciones en geometría euclidiana y no euclidianaAún no hay calificaciones
- UF0306 - Análisis de datos y representación de planosDe EverandUF0306 - Análisis de datos y representación de planosAún no hay calificaciones
- Bolon Tiku: Matemáticas Y Astronomía En La América PrecolombinaDe EverandBolon Tiku: Matemáticas Y Astronomía En La América PrecolombinaCalificación: 5 de 5 estrellas5/5 (1)
- No Matarás Animales!: El Primer Mandamiento para la salvación humanaDe EverandNo Matarás Animales!: El Primer Mandamiento para la salvación humanaAún no hay calificaciones