También podría gustarte
- Ae1 TP2 Ej5Documento6 páginasAe1 TP2 Ej5federicobarbis2Aún no hay calificaciones
- Ae1 TP2 Ej2Documento6 páginasAe1 TP2 Ej2federicobarbis2Aún no hay calificaciones
- Ae1 TP2 Ej4Documento5 páginasAe1 TP2 Ej4federicobarbis2Aún no hay calificaciones
- TP 5 - MLÑ, MN, A - Factor de Potencia 2015Documento5 páginasTP 5 - MLÑ, MN, A - Factor de Potencia 2015marcos100% (1)
- ConsevaciondeL Rodadura2008-1Documento16 páginasConsevaciondeL Rodadura2008-1Carlos RodriguezAún no hay calificaciones
- CRUCIGRAMADocumento2 páginasCRUCIGRAMARobert BidoAún no hay calificaciones
- Ae1 TP1 Ej6Documento6 páginasAe1 TP1 Ej6federicobarbis2Aún no hay calificaciones
- Cap22 - Circunferencia Trigonometrica IDocumento11 páginasCap22 - Circunferencia Trigonometrica ILuis SandovalAún no hay calificaciones
- EYP1113-3 (Clase 35)Documento50 páginasEYP1113-3 (Clase 35)CRISTOBAL MITJANS PRIETOAún no hay calificaciones
- Notas Cyt - 3ro ManchegoDocumento1 páginaNotas Cyt - 3ro ManchegoKarol GardenAún no hay calificaciones
- Unidad 4.3 ParábolaDocumento8 páginasUnidad 4.3 ParábolaDaniella Flores GeldresAún no hay calificaciones
- Lista Clase 10 SolDocumento15 páginasLista Clase 10 SolmagicAún no hay calificaciones
- Ae1 TP2 Ej1Documento5 páginasAe1 TP2 Ej1federicobarbis2Aún no hay calificaciones
- Cuadernillo de Preguntas Test de InteligenciaDocumento12 páginasCuadernillo de Preguntas Test de InteligenciaAnnie Elizabeth Mansilla ZavalagaAún no hay calificaciones
- Formulario Examen ODEDocumento2 páginasFormulario Examen ODEMariangela GonzalezAún no hay calificaciones
- Circunferencia Goniometrica PDFDocumento7 páginasCircunferencia Goniometrica PDFbeatriz galindoAún no hay calificaciones
- Practica Dirigida #05 Regresion y CorrelacionDocumento3 páginasPractica Dirigida #05 Regresion y CorrelacionLuis ChepenAún no hay calificaciones
- Multiplicacion de Monomios y PolinomiosDocumento3 páginasMultiplicacion de Monomios y PolinomiosJavier Mija urdanigaAún no hay calificaciones
- 6o, S'LZ:, G O'u ZDocumento1 página6o, S'LZ:, G O'u ZIanik PinzariAún no hay calificaciones
- AE3-T1 Elasticidad 3DDocumento78 páginasAE3-T1 Elasticidad 3DJuan Cruz TauterysAún no hay calificaciones
- Isometrico PDFDocumento5 páginasIsometrico PDFJoan Salazar LimayAún no hay calificaciones
- Unidad 7 2020 (Para Imprimir)Documento4 páginasUnidad 7 2020 (Para Imprimir)Abel TorrejónAún no hay calificaciones
- Previar de FormuleDocumento2 páginasPreviar de FormuleIu AnAún no hay calificaciones
- W. Heinze Milonga en La Que Hay Una DespedidaDocumento2 páginasW. Heinze Milonga en La Que Hay Una DespedidaLuciano GrandiAún no hay calificaciones
- Formulario de BalanceDocumento4 páginasFormulario de BalanceSpawn BandicootAún no hay calificaciones
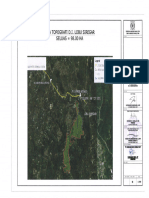
- Peta Topografi Lobu SiregarDocumento1 páginaPeta Topografi Lobu SiregarfreddiAún no hay calificaciones
- T8 GómezVargas Diego PDFDocumento7 páginasT8 GómezVargas Diego PDFDiego Gómez VargasAún no hay calificaciones
- Diagnóstico de Reactores A Partir de DTRDocumento4 páginasDiagnóstico de Reactores A Partir de DTRMozzy GuAún no hay calificaciones
- Demostracion de La Numerabilidad de Los Racionales - Diagonal de CantorDocumento14 páginasDemostracion de La Numerabilidad de Los Racionales - Diagonal de CantorJUANMONTESINOAún no hay calificaciones
- MatematicasDocumento20 páginasMatematicasContrerasAún no hay calificaciones
- 4 Evaluacion Laboral - Analisis Grafologico Del Relato Persona Bajo La LluviaDocumento155 páginas4 Evaluacion Laboral - Analisis Grafologico Del Relato Persona Bajo La LluviaAndres ArellanoAún no hay calificaciones
- Tarea LDocumento15 páginasTarea LBrayan FigueroaAún no hay calificaciones
- Cepre 2 NumeracionDocumento2 páginasCepre 2 NumeracionNikita VivancoAún no hay calificaciones
- Acreditacion de Excel SebastianDocumento1 páginaAcreditacion de Excel Sebastiandan friasAún no hay calificaciones
- Planos La Iglesia La PaseraDocumento4 páginasPlanos La Iglesia La Paseralanc 21Aún no hay calificaciones
- Propiedad MarkovianaDocumento9 páginasPropiedad Markovianaluis lozanoAún no hay calificaciones
- Interpretacion Geometrica de La Derivada Como Una PendienteDocumento3 páginasInterpretacion Geometrica de La Derivada Como Una PendienteJeffrey Paredes MolinaAún no hay calificaciones
- 2 Descomposicion de Fuerzas en Tres DimensionesDocumento5 páginas2 Descomposicion de Fuerzas en Tres DimensionesBrYan Cabrera33% (3)
- Lista Clase 15Documento4 páginasLista Clase 15Esteban Huacasi VargasAún no hay calificaciones
- Sesion de Clase de Trigonometria - Clase ModeloDocumento2 páginasSesion de Clase de Trigonometria - Clase ModeloMaria Esther Damián VenturaAún no hay calificaciones
- Sistemas de Trabajo y Modelos para El Plan de Atencion de EnfermeiaDocumento9 páginasSistemas de Trabajo y Modelos para El Plan de Atencion de EnfermeiaMELIZA YERALDINE VALDERRAMA MUÑOZAún no hay calificaciones
- Topografía PopoDocumento1 páginaTopografía PopoJhonny Fuertes SilvaAún no hay calificaciones
- Act 3 Problemario 3Documento6 páginasAct 3 Problemario 3JoséAún no hay calificaciones
- 6.4 Viscosidad en Mezcla de GasesDocumento1 página6.4 Viscosidad en Mezcla de GasesSALVADOR MARTINEZ GUSTAVO ANDREEAún no hay calificaciones
- Fórmulas Mecánica de MaterialesDocumento3 páginasFórmulas Mecánica de MaterialesbcastillaAún no hay calificaciones
- Desarrollo Tarea MathTypeDocumento9 páginasDesarrollo Tarea MathTypeclaudioAún no hay calificaciones
- Tarea 6Documento5 páginasTarea 6Daniel Alejandro López ArteagaAún no hay calificaciones
- Ae1 TP1 Ej5Documento6 páginasAe1 TP1 Ej5federicobarbis2Aún no hay calificaciones
- Distribucion Bidimensional-Regresion y CorrelacionDocumento30 páginasDistribucion Bidimensional-Regresion y CorrelacionErick PrietoAún no hay calificaciones
- Biologia 33Documento3 páginasBiologia 33Sergio IriarteAún no hay calificaciones
- Progresiones y SumatoriasDocumento5 páginasProgresiones y SumatoriasLuisAún no hay calificaciones
- Solera AndaluzaDocumento25 páginasSolera AndaluzaVicente Gutierrez Solaz100% (1)
- Formulas ColasDocumento3 páginasFormulas ColasgabrielaAún no hay calificaciones
- Formulas Descriptivas PDFDocumento2 páginasFormulas Descriptivas PDFROMINAQUIQUINTOAún no hay calificaciones
- Formulas DescriptivasDocumento2 páginasFormulas DescriptivasSofia OlletaAún no hay calificaciones
- Química 3ero Sec - Números CuánticosDocumento6 páginasQuímica 3ero Sec - Números CuánticosMARIA VICTORIA BEDON TORRESAún no hay calificaciones
- SKT AlexDocumento1 páginaSKT AlexMUHAMMAD JOENETAún no hay calificaciones
- Entre Tus ManosDocumento2 páginasEntre Tus ManosJoseAntonioPerezRizoAún no hay calificaciones
- Principios de GeometríaDocumento18 páginasPrincipios de GeometríaFJosé PirtAún no hay calificaciones
- El Loco PeligrosoDocumento14 páginasEl Loco PeligrosoMatius De la MadridAún no hay calificaciones
- Informe de Instalacion Electrica MalaDocumento2 páginasInforme de Instalacion Electrica MalaMichael JuradoAún no hay calificaciones
- Silabo de IrrigacionDocumento7 páginasSilabo de Irrigacionlidda livis soto leonAún no hay calificaciones
- 1.1.1 Conceptos de Grupo Equipo y Grupo de TrabajoDocumento6 páginas1.1.1 Conceptos de Grupo Equipo y Grupo de TrabajoJesúsCatarinadelaCruzAún no hay calificaciones
- Programa Educacion Financiera SCPN 2022Documento14 páginasPrograma Educacion Financiera SCPN 2022Karol JosselynAún no hay calificaciones
- Numerologia BasicaDocumento11 páginasNumerologia Basicaleon2torresAún no hay calificaciones
- La Fertilización Foliar en Olivar. Corrección de Carencias Nutricionales - 1.1-1Documento19 páginasLa Fertilización Foliar en Olivar. Corrección de Carencias Nutricionales - 1.1-1Francisco Martinez CarrizosaAún no hay calificaciones
- Apuntes Sobre El Tercer Pleno Casatorio Civil PDFDocumento5 páginasApuntes Sobre El Tercer Pleno Casatorio Civil PDFPEDRO DANIEL ESCOBAR FLORIaNAún no hay calificaciones
- Resumen de La Exproducion - PiscisDocumento2 páginasResumen de La Exproducion - PiscisMilagros ParedesAún no hay calificaciones
- Metodo de DiagnosticoDocumento16 páginasMetodo de Diagnosticojavier ruizAún no hay calificaciones
- Fase 3 - Trabajo Colaborativo - Grupo. 551113 - 1 PDFDocumento26 páginasFase 3 - Trabajo Colaborativo - Grupo. 551113 - 1 PDFFlor Yadira Moreno GarzonAún no hay calificaciones
- Informe de Uñas PalianDocumento6 páginasInforme de Uñas Palianjose luisAún no hay calificaciones
- Tema 3 Lenguaje y Com N.I YessibelDocumento12 páginasTema 3 Lenguaje y Com N.I YessibelFredy de JesusAún no hay calificaciones
- Proyecto Cancionero 2024Documento19 páginasProyecto Cancionero 2024CeliayAriel NavarroyMontenegroAún no hay calificaciones
- Planos y Modelos A Realizarse en El Curso - PtarDocumento25 páginasPlanos y Modelos A Realizarse en El Curso - PtarEver Ivan Alvites RodriguezAún no hay calificaciones
- Hoja de Vida ENFERMERADocumento2 páginasHoja de Vida ENFERMERAMiscelanea OasisAún no hay calificaciones
- S03.s1-Capacidad JuridicaDocumento39 páginasS03.s1-Capacidad Juridicayesenia arzapaloAún no hay calificaciones
- Los 10 Mandamientos de La Minería Responsable - Agustín Bravo GaxiolaDocumento6 páginasLos 10 Mandamientos de La Minería Responsable - Agustín Bravo GaxiolaAgustín Bravo GaxiolaAún no hay calificaciones
- Ensayo Por Otro Camino.Documento6 páginasEnsayo Por Otro Camino.lucho portuanoAún no hay calificaciones
- Desarrollo y Sustentabilidad en La GerenciaDocumento5 páginasDesarrollo y Sustentabilidad en La GerenciaDouglas PerezAún no hay calificaciones
- 16S 1650 IVECO O.D.-nº 0091 008 006-Fev-2005 - 1297095070-071 - 092 PDFDocumento43 páginas16S 1650 IVECO O.D.-nº 0091 008 006-Fev-2005 - 1297095070-071 - 092 PDFÁlvaro Ricardo Lopatiuk100% (1)
- CJ - Un Show Más Wiki - FANDOM Powered by WikiaDocumento7 páginasCJ - Un Show Más Wiki - FANDOM Powered by WikiaIntel_Pentium_IAún no hay calificaciones
- Lista de Chequeo Informe TecnicoDocumento3 páginasLista de Chequeo Informe TecnicoVictor AcostaAún no hay calificaciones
- Ruta Pedagógica de Observación y Reconocimiento Del Contexto Escolar en Primera InfanciaDocumento5 páginasRuta Pedagógica de Observación y Reconocimiento Del Contexto Escolar en Primera InfanciaAngie SantanaAún no hay calificaciones
- Exposicion Instalciones Sanitarias para DiscapacitadosDocumento25 páginasExposicion Instalciones Sanitarias para DiscapacitadosalbertAún no hay calificaciones
- BPZ - Lote Z-1Documento19 páginasBPZ - Lote Z-1Walter Eloy Ramirez CarranzaAún no hay calificaciones
- Partidos Wnba Storm Prime VideoDocumento1 páginaPartidos Wnba Storm Prime Videoaarevalo.1Aún no hay calificaciones
- Silabo Wa Dere Derecho Penal I 2017Documento3 páginasSilabo Wa Dere Derecho Penal I 2017Alexander Henry Doroteo Flores100% (1)
- Tratamiento de Crudo Con Magnetismo PDFDocumento11 páginasTratamiento de Crudo Con Magnetismo PDFPedraza Velandia JhonAún no hay calificaciones
- Manual Captura C911Documento42 páginasManual Captura C911Gabriela PerezAún no hay calificaciones