0% encontró este documento útil (0 votos)
1K vistas197 páginasCurso de Programación Básica IRC5
Cargado por
ruben.medina.bacaDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF o lee en línea desde Scribd
0% encontró este documento útil (0 votos)
1K vistas197 páginasCurso de Programación Básica IRC5
Cargado por
ruben.medina.bacaDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF o lee en línea desde Scribd
‘© ABB University
ABB MEXICO S.A. DE C.V.
CENTRO DE ENTRENAMIENTO
ROBOTICA
CURSO DE PROGRAMACION
BASICA IRCS5
El material en este documento no deberd de ser reproducido o copiado de
ninguna forma sin la autorizacién escrita de ABB México S.A. de C.V.
El contenido de este documento no deberd ser impartido a una tercera parte ni
utilizado para cualquier uso no autorizado.
ABB Flexible Automation
‘Autor: Eduardo Rivera Diaz
Rev.02 2017
(© ABB University
Nuevo color 2015
‘© ABB University
CURSO DE PROGRAMACION BASICA IRC5
Presentacién del instructor y los participantes.
Espectativas de los participantes.
Alcance del curso.
Informacién de empresa ABB.
Caracteristicas del Sistema IRC5.
Conocimientos Basicos.
Seguridad en robots.
Flexpendant y navegacion en ventanas.
Movimiento del robot.
Registro de eventos.
Memoria del sistema IRC5.
Crear programa.
Respaldo de Informacion.
Concepto TCP.
Creacion de TCP en el robot.
Caracteristicas Informativas RobotStudio.
Instrucciones / Tipos de Dato
Instrucciones de movimiento.
Instrucciones para sefiales E/S.
Instrucciones de espera.
Menu Edicion en ventana Programa Editor.
Calibracién - Actualizacién de contadores.
Rutinas.
Estructura de programa: Modulos.
Instrucciones para toma de decision.
Declaracion de Datos: Tipo de almacenamiento de informacién.
Instrucciones para saltos de programa.
Instrucciones para trabajar con numeros.
cee ripe
‘© ABB University
> oe
CURSO DE PROGRAMACION BASICA IRC5
+ Instrucciones para Pantallas al Operador.
+ Instrucciones/Funciones de tiempo.
+ Concepto Work Object.
+ Creacion de Work Object.
+ Instruccciones extra.
: INDICE TEMATICO.
© ABB University
Induccién de Seguridad a Visitantes
Seguridad
oy Medio
Ambiente
‘Seguridad Instalaciones ABB S. L. P.
‘ESTE APARTADO DE INDUCCION DE SEGURIDAD A VISITANTES
‘NO APLICA PARA CURSOS EN SITIO i
Induccion de Seguridad a Visitantes
Alarma de emergencia
Cuando escuche la alarma de fuego, usted debera
ir al punto de reunion mas cercano a SU ubicacion,
siguiendo la ruta de evacuaci6n.
+ Enel punto de reunion mantenga la calma y siga
instrucciones.
(© ABB University
© ABB University
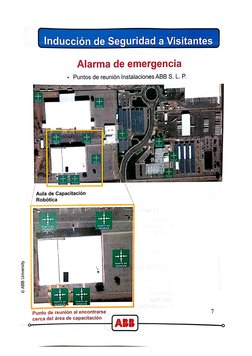
Alarma de emergencia
+ Puntos de reunién Instalaciones ABB S. L. P.
| Aula de Capacitacion
Robotica
Punto di n al encontrarse 7
cerca del area de capacitacion {ABB}
© ABB University
Ind
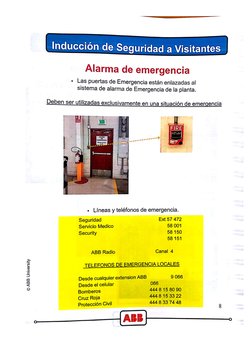
Alarma de emergencia
+ Las puertas de Emergencia estan enlazadas al
sistema de alarma de Emergencia de la planta.
Deben ser utilizadas exclusivamente en una situacién de emeraencia
+ Lineas y teléfonos de emergencia.
es
‘© ABB University
n de Seguridad a Visit
Servicio Médico
+ En-caso de ser necesario puede contar con la atencién de
nuestro departamento de servicio médico.
Aula de Capacitacion Servicio
Robotica Médico
de Seguridad a Visitantes
Indicaciones para visitantes
+ Se prohibe el uso de cdmaras fotograficas y de video en
nuestras instalaciones.
DE SER SORPRENDIDO TOMANDO FOTOS O VIDEO PUEDE
CAUSAR QUE SE LE SOLICITE RETIRARSE DE LA PLANTA Y
NEGARLE EL ACCESO A NUESTRAS INSTALACIONES.
: Areas establecidas para fumadores.
ESTA PROHIBIDO FUMAR fuera de las areas establecidas.
‘© ABB University
Aula de Capacitacién Robotica { A BB
(© ABB University
Indicaciones para visitantes
+ Colabore con el programa para clasificacién de desechos
Los cestos de basura estan identificados con el tipo de desecho.
jTOmese unos segundos para cuidar el medio ambiente
analizando qué tipo de material desechara !
Si desconoce el tipo al que pertenece la materia que desea
desechar, coléquelo en basura general.
1X
de Seguridad a Vis
Indicaciones para visitantes
+ Se prohibe el dafio o maltrato de Robots mobiliario e
instalaciones.
FAVOR DE NO RAYAR ROBOTS, MESAS, FLEXPENDANT, Y
EN GENERAL NINGUN MOBILIARIO O EQUIPO DE
NUESTRAS INSTALACIONES.
Algunas practicas del curso utilizaran papel y lapiz para trabajar,
el papel sera la unica superficie destinada para dibujar.
© ABB University
© ABB University
1. Introduccion
(© ABB University
> —_@ii cr
EQUIEN ES ABB?
ABB es el resultado de la unin entre 2 compaiiias, la primera de
Suecia: ASEA (Allmanna Svenska Elektriska Aktiebolaget) y la
segunda, de Suiza: Brown Boveri Compaiiy; actualmente ABB es
lider en el ramo electromecanico a nivel mundial.
Power
Products
Power
‘Systems
€
Discrete
‘Automation
Low Voltage
and Motion.
A
Products
Hp
Process.
‘Automation
© ABB University
ABB Robotica
u tt
Enel afio de 1974 patentamos ol primer robot
industrial totalmente eléctrico controlado por
computadora con cinco grades de libertad.)
Contamos con la poderosa herramienta de
‘simulacion y programacién offline, RobotStudio.
MI
‘|Nuestro manipulador con mayor capacidadde g
Sy “carga: IRB 8700 ,
Bi
Contamos con la avanzada aplicaciénide control
oi MULTIMOVE, con la cual podemos controlar
simultaneamente hasta 4 robots con una sola
computadora.
ABB México desde hace mas de Veinte afios
dido mas de 3,000 robots a nivel nacional y
do todo tipo dé aplicaciones industriales:
industria farmacéutica y a
Nuestra presencia como
y al afio 2015 hemos ven
Centroamérica, cubrien
desde el 4rea automotriz hasta la limenticia.
© ABB University
2. Sistema IRC5
Controtador IRCS
‘© ABB University,
5 i In
Caracteristicas sobresalientes:
vy Plataform:
istema esta basado en la generacién de controladores S1, S2, S3, S4, S4C y S4Cplus
probados durante mas de 30 afios en campo.
S1 1974-1982 83 1987 - 1996 ‘S4C 1996 - 2005
ji: ‘S4Cplus 2000-2005 g-
i
IRCS 2004...
‘$2 1983 - 1993, 84 1994-1998
v Linea de Productos: i
EIIRCS esta disefiado para controlar toda nuestra de gama robots con capacidades de
carga que van desde § Kg hasta 500 Kg. Esta es la primera linea de equipos con los que
‘surgié el controlador IRC5:
Ke SK KE. Oke 500 Kg.
16Kg. m5 Ke
Ske.
Nueva linea de Productos:
Posteriormente, se han agregado nuevos modelos, tales como:
—
anryte
© ABB University
} EEE
Caracteristicas sobresalientes:
n_con pantalla touchscree:
Emplea WINDOWS como interfaz grafica, estandar en equipos de cémputo.
—————
ie OSD SSE AEOE Eis
Git PE EOB)
SEEHE HOH
| Ewe
eth rrae
i
eh a
Antes: Teachpendant
Ahora: Flexpendant
v Robotware:
Sistema Operativo del robot (Software), conocido también como Baseware,
interpretndolo de otra forma seria el "windows" que utiliza el robot.
Tratandose del IRC5 hablamos de
revisiones 5 en adelante, por ejemplo,
5.10 - 5.15.
Nota: La revision del software provoca
grandes diferencias en la
funcionalidad y distribucién de meniis
en el FlexPendant.
v Processware:
Es el software de aplicacién para diferentes procesos especificos, éste diferiré con la
aplicacién para la que el robot esté preparado. El ProcessWare se manifiesta como
instrucciones que pueden ser programadas, diferentes menus, pantallas de estado, iconos
0 funciones.
EEE
Caracteristicas sobresalientes:
¥ Nuevas Herramientas:
Tres nuevas herramientas para programacién, servicio y rastreo de fallas:
RobotStudio
Software para realizar simulacién de celdas y equipos, 3
probando su funcionalidad o realizando programaci6n ~
fuera de linea, mejorando resultados y ahorrando tiempo
en la integracién,
FlexPendant
Unidad de programacién, con el ambiente Windows que
maneja facilta el trabajo con el equipo, su nuevo disefio
de menor peso y dimensiones lo hace mas cémodo.
Remote Service
‘Ahora nuestros robots pueden hablar’, es el lema
bajo el cual opera esta nueva opcién, con la cual
todos los mensajes de evento que se origen en el
Remote Service eauipo son enviados a un servidor donde personal
de la empresa le da seguimiento y puede avisar al
cliente sobre los mismos.
Permite controlar hasta cuatro robots y sus ejes externos desde un sdlo modulo de
control, una sola computadora, de manera simulténea.
© ABB University
‘© ABB University
3. Conocimientos Basicos
[Nacimiento del primer robot
ABB do 6 oes.
20
© ABB University
S CONOCIMIENTOS BASICOS
MANIPULADOR / BRAZO
EJES
IRB120 IRB140 eat
Finoseporene [eee ae notin
Bs Aes eeroeees a _ 4 ae bys 16S"
cet | + 65° — = 1s? 7 | | LE Ilo” — - 110"
Eje 2 + gt. = 00" Z =| To ftgo te (o"| |
2 | | 4p ~~ 200° pee Ae
ees Hee a C= ~1) 0" bas 0
— us. pS | tye ait :
je 5 te Ss ee | Aa — 3 60 pins 25
21
‘© ABB University
y CONOCIMIENTOS BASICOS
CONTROLADOR
3 CONOCIMIENTOS BASICOS
CONTROLADOR
f Doncldelayprerador
Interruptor Principa):
52% guise
Botén de Paro de Emergencia: d
Cpeltene 21 maai'et's fo de obot
Bofon Motors On: J
Colada. ora lod
5 lecey sisfe segut®
: < de avlormalrce
Selector de Modo de Opera
squvor do de} (ober
LEDS de cadenas de Seguridad ( * Opcional }:
\ CS ss le
Puerto USB (* Opcional }:
or meade rin ad belonal pose res/e Mle
HOT PLUG (* Opcional ):
we wb thélad les Lon de he
iuerto de Sirvigiog
a oor,
esis bia SPY
exe
Conector de Unidad de Programacién: 7
ds vande giebierdes |
2 ‘Medidor de horas (* Opcional ): :
g j w bor teteh
5
2 Toma de 115 6 230 VCA (* Opcional ):
a 4
3 con ly
23
© ABB University
s CONOCIMIENTOS ICOS
UNIDAD DE
PROGRAMACION
Llexpeaden!
Joystick:
oad ectve)
Botén de Paro de Emergencia:
Deere ey rovwticnfe
er clen
Boton de Habilitacién
(Boton Hombre Muerto):
olen BZ pes. rtone
MODOS DE OPERACION
DEL ROBOT
Modo Automatico
cove
ra buss aulonoma
0%
Vel Ma en cedex Peograrta ayclocibde danlrubre
Aalo. {doy
24
(ABB }
cS
i)
xe)
=
—}
tor)
ry
on
+
Aysionun gay o
25
© ABB University
s PUNTOS DE RIESGO EN UN ROB
CONTROLADOR
jCUIDADO!
ALTO VOLTAJE DENTRO DEL CONTROLADOR:
wet de dense de asa Mio ae
Hosba /000 vcf
26
‘© ABB University
s PUNTOS DE RIESGO EN UN ROBOT.
MANIPULADOR
@ iCUIDADO!
" RIESGO DE ATRAPAMIENTO / APLASTAMIENTO.
|
4
© ABB University
> PUNTOS DE RIESGO EN UN ROBOT
MANIPULADOR
jCUIDADO!
CON LA BOTONERA DE LIBERACION DE FRENOS
6 BOTONES
iNOTA!
HAGA USO DE LA BOTONERA SOLO SI EL PESO NETO DEL
BRAZO__ [| Sfa_Ssende ohare gov Z elevacten
28
(© ABB University
ry UNTOS DE RIESGO EN UN ROBOT
MANIPULADOR
{CUIDADO CON EL CONTRAPESO!
RIESGO DE ATRAPAMIENTO / APLASTAMIENTO.
CUIDADO CON EL AREA DEL PARALELOGRAMO!
RIESGO DE ATRAPAMIENTO 1 APLASTAMIENTO
- ES wma area Pve ale oCterra_a\ movers
a1 \rezo
jCUIDADO ALTA ENERGIA
ALMACENADA EN
3 CILINDROS DE
BALANCEO!
© ABB University
4 DISPOSITIVOS DE SEGURIDAD
Lica i lle cea
30
© ABB University
s 1») SITIVOS DE SEGURID.
CADENAS DE SEGURIDAD IRC5
‘rarer So coe
een
Peepers ce ba
fro sto Y
EREU STOR
Pp rcn
Para conectar dispositivos / sefiales de seguridad que,
CADENA AUTO STOP:
Salamen Je.
CADENA AUTO STOP:
deseo vigilar v.
CADENA GENERAL STOP: Para conectar dispositives / sefiales de seguridad que
deseo vigilar_cnrode av to ymenva/
CADENA SUPERIOR STOP: Para conectar dispositivos / sefiales de seguridad que
deseo vigilar awed
Para conectar dispositivos / sefiales de
CADENA EMERGENCY STOP:
‘© ABB University
s DISPOSITIVOS DE SEGURID:
CADENAS DE SEGURIDAD IRC5
Restablecer funcionamiento de! Robot cuando se interrumpe una Cadena de Seguridad
=
Teeny up rat a pect ee
‘ictelon naserstwur ms men es
Paso Accién
1 VYarshocer CondeCrarey SegereS enla cela
2 Locales xeselee, \esiossfs0es que oregnetan
Ve conivesen de pore
3 Peconosca eitsp are en Stem perdirl
yewone Ct hoton dermoler Ob de
LAT segyrdays
32
{ass}
»y DISPOSITIVOS DE SEGURID,
VIGILANCIA DE CADENAS DE SEGURIDAD:
CADENA AUTO STOP:
CADENA GENERAL STOP: Seysgila Se wratle Seur)la_
CADENA SUPERIOR STOP: seurgile se uigtla Se ysgila
CADENA EMERGENCY STOP: ge wig,le htt Je us\f
CADENA EMERGENCY STOP:
© ABB University
33
© ABB University
s DISPOSITIVOS DE SEGURIDAD
PRACTICA : CADENAS DE SEGURIDAD:
En base a la informacién anterior, indique {A que cadena conectaria cada dispositivo? :
(Indicados por el instructor)
CADENA AUTO STOP: 5
SABENA AUTO STOP: ea,
or
of
CADENA GENERAL STOP:
CADENA SUPERIOR STOP:
fOP:
CADENA EMERGENCY ST. fine d emergency
34
y DISPOSITIVOS DE SEGURIDAD
CADENAS DE SEGURIDAD IRC5
Resumen (Conexién Correcta de Dispositivos)
CADENA AUTO STOP:
CADENA GENERAL STOP:
CADENA SUPERIOR STOP:
© ABB University
CADENA EMERGENCY STOP:
fue MPG HOG
35
_—_—_(__—
‘© ABB University
d Seguridad
% Puntos de riesgo:
Zonas de peligro al personal en general.
Sistema de Sequridad del robot:
Encargado de recibir todos los dispositivos y sefiales de las seguridades
de la celda
% _Cadenas de sequridad:
Lineas de seguridad independientes entre si para la conexidn y agrupacion
de dispositivos de seguridad de la celda.
Sentido comun:
No confiarse, estar alerta, etc.
& Limites de eje:
Empleados para limitar la maxima carrera de los ejes:
*Mecanicos (Ejes 1-3)
*Por interruptores de limite
*Por pardmetros de Sistema.
Reduccién de velocidad para programacién:
En Modo Manual la velocidad maxima posible es de 250 mm/seg.
% Dispositivo de habilitacion: :
Utilizado para energizar motores en modo manual, también conocido
como: Dead Man 6 Safety Switch. "s
aunaeneeanenea-— Jeasince neo
‘© ABB University
5. Flexpendant y navegacion en ventanas
Flexpendant
37
‘© ABB University
s Descripcién del sistema
Descripcién del Controlador
+ Soluciones distribuidas
c
—
38
© ABB University
> Descripcion del sistema
Descripcion del Flexpendant
fates prosoneble
ele en a
Bes poe
s Descripcién del sistema
Descripcion del Flexpendant
|, [lo
fegben
lor bly
fey pe de
Cre Genh
PROC main()
ENDPROC
lENDMoDULE
Ce. Jecveront
a te re
TZ) 7
Killed
‘© ABB University
© ABB University
Py Descripcion del siste!
Descripcion del Flexpendant
El dispositivo de habilitacién es un interruptor de
presién con tres posiciones.
El interruptor deberd estar en la posicion
intermedia para poder habiltar los motores.
Necesario en modo manual para:
-Mover el robot con el joystick
-Ejecutar programa 7
Dispositivo de habilitacion
Teclas Dedicadas
Recuperadas de modelos previos de TPU, estas teclas son de util
momento de programar.
fad al
Stylus, incluidos con el equipo, se
incluyen varias unidades extra con
el mismo.
Puerto USB en la unidad de programacién
41
_—_—_—_@__—-
s Descripcion del siste
Descripcion de la pantalla
Bora dle esfodo Cc Belen ein Bolen 4 cerned
.
4? Version
eu Jenes abier/os
Ss Maximo
2? Version
we dor
Vol
© ABB University
_ 42
-Para realizar ajustes finos a
posiciones
1 Robot
Bkeadge eae 7st =)
-Para visualizar/simular/forzar
Sfodes y Salidas
= exoles de entre
Coanundes Ya casichoe &
-Para visualizar/cambiar
Conkrgoracten ackvol
en son 2, “@
-Para visualizar la ejecucién del programa
en rhode a omal eo
Peamcbate: peste has
“Eco
-Para,modificar posiciones en La.
2 Moue =
pnd yuceer
(Dx Paya crearivisualizar/editar
(Fall ae SNe Sor Usa des
ane frogrorea deRovok
ror ge cXor. de USueri'a en Case.
varies USI "S Cope gere,
Zvents 500" 1 copegers
Broo
n del siste:
Similer 6
Descripc
ie Ses)
FEBNE Yah in orn
Para descaigarla informacion de ode une
na a
? ravines €1 prsere
Pace Ce es LP EM
stbiot
oraee sitkt
Ment ABB
desesuadedels
(d—
on sia.
-Para actualizal (ocucn Le rrevalvctones
-Para procedimientos ador
der cen eeeeON
-Para configurar pargynetros de sis| mf,
eres ona ba/ Mews oe sis E nylody
pci Ntos (Caminicacione/ 4
Conran’ here. x fecnadefebod
ccoageguror deues programch eS
Aconnguter Seflales ‘Zovort 7
- Cone wer dione
de
Para visualizer (05 Gvertpo OCUTCOs
enel Loncer orl sel] Le Loko?
Para guardar yne come fx
os evetlos
Realizar acciones en los archivos de la
Memoria Interna y USB com
qvesor en loS arenives
ot Carpe:
er arenives
w flora. CYC
ford prow
4 Pe tones
FRI, Soitkicarelos!-
orerabivo det _ptobot
flor vanieeo formal es Sidon
Uo ascot
LOS Gpcedmveale
Se hol cSE ayorzaddo
© ABB University
s Descripcién del sistem:
Ventana: Inputs and outputs
Para buscar una sefial:
(ABD[SB) sem Saat
a
1
Mer part dalla
erates povon'les
Grecomnducson)
Peolice busqeda de senales
Pilbronde por ebavas
freee vesvalese
a alels podules 24
EhSe la fovtela
oft Sane ls
ES ONE J
Ve Joc se mec on fae
Bilas Yor GeFeles Vows
Foe? Jus alia =
© ABB University
s Descripcion del sistema
Ventana: $& Inputs and outputs
Para buscar una sefial (Cont...):
Usualvzer esdods
i
ee
i
Pale (fer
poveg at re5 bale
Lex fode amperord
apres eee feat
(yssialidor es dado
aa
Loree espace
a en [a Se
45
© ABB University
y
Ventana: Control panel
ABB |Q[ Someone Seti
fig wore IND oc ond nese
[GB trout and outpets
[Gb Predhcton Window
IN Prooram Eator
|P Proto ota
Event Log
FlexPendant Explorer
System Info
Devore —[Sjnana
Para configurar las teclas programables del Flexpendant:
‘Sptem Diagnoses
Contgures stem parameters
Else la pct
Conhgvre’
f
ppgure BA
tna con 7
pode (ane)
y Descripcion del sistem:
Ventana: Control Panel
Para configurar las sefiales favoritas:
[ABB] [Sirens Senne x
‘Sets date and tine forthe oot conor
system get
Coates stem parameters
Catach touchscreen
i. ol. Ss
bee
Qe OE ow coe
© ABB University
47
© ABB University
6. Movimiento del robot
48
© ABB University
2 aoe uo a er Eero)
Ventana: gb Jogging
cae ae
Fite dh wovrivte patirrh
Tit saat
ey pe Br
osiGT
Sebo
Con abvrcreles «hi
Bene de vesyrvesto delos ti
Cenesuer Pewontle peters
[new Fa
an aunafec'a — o¢fver unéled
(© ABB University
En
> Procedimientos basicos
Tipos de movimiento Manual
Movimiento por Ejes
Axis 1-3... / axis 4-6...
“Configura el movimiento a
i % 6S
50
s Procedimientos basicos
Tipos de movimiento
Movimiento Lineal
dil de a
[Soap
[ape mop ee
Mechanica unit: ROB...
Todos los robots tienen
definido de fabrica un TCP
que se llamajalo__yes un
punto localizado ,
det disco cer ale
51
‘© ABB Universitv
© ABB University
s Procedimientos basicos
Tipos de movimiento
Movimiento Lineal
(Sistema de Coordenadas)
P(xy,2)
Regla de la Mano Derecha:
Utlizada para determinar Les Aovceclone
poles er de Costar sickne
de Coordenadas. Colocando dedos:
indice, Medio y Pulgar.
Veamos algunos ejercicios... a
2 Procedimientos basicos
Tipos de movimiento
Movimiento Lineal
(Sistema de Coordenadas)
Ejercicio: Aplicando la Regla de la Mano Derecha, 7
determine las direcciones positivas de los siguientes sistemas de coordenadas (20 min)
Zt 7 x
J. x * i a
wy =
u % * Y+ 2g
X Xe
7
-Y.
Y
© ABB University
>
Tipos de movimiento
Movimiento
(Sistema de Coordenadas)
Sistema de
Sistema de
Coordenadas
Identifique
2 fepade Leet dene oa
© la base del Brazo. : i p
Apligar la egla ge la mang derecha ort eet aspounya
im apuntando él iia ‘dela Pe Te nc cee apieah S: ,
& “Sera delos cables steal, y Are ee tool las dregeiones ES.
wand el Ustatoateaey/adba er 742 (00) evo,
54
Procedimientos basicos
Tipos de movimiento
Movimiento Lineal
(Sistema de Coordenadas)
Sistema de
Coordenadas
‘Sistema de
Goanterads
deeMet
Identifique taal Leste dts ath
base del Brazo.
plicar la regia de la mano dereche¢ en el centro
hasan, 50 or si 1a ieatiake eee
in acc ‘ey ¢l pulgar epuntando
ve fowiaes ck S210 Kasse ovr’
Identifique renla
base del Brazo.
Aplicar la regla de la mano derecha en el centro de
~apuntando el indice de la parte trasera de los cables
el pulgar apuntando
NOTA; Estas direcciones aplican
Para otros work object, las direociones x, y, 2 Se
definen por el usuario
55
d Procedimientos basicos
Tipos de movimiento
Movimiento Lineal
(Sistema de Coordenadas)
Para un robot configurado para ele enyelo
Sistema de Sistema de
Sistema de
Coordenadas Coordenadas + Coordenadas WORK
BASE WORLD OBJECT
(para wobj0)
Para un robot configurado para! ywoalade_payorlrde
Sistema de Sistema de
Sistema de
Coordenadas Goordenadas WORK
Goomdenadas WORLD OBJECT
vale (para wobj0)
pe
56
+ Procedimientos basicos
Tipos de movimiento
Movimiento Lineal
(Sistema de Coordenadas)
En base a la informacién previa, participemos todos:
De que informacion mostrada en la siguiente ventana Jogging podemos interpretar su significado?
_Cémo esta configurado el movimiento del robot para el joystick en el siguiente ejempjo?
on Au lor A
lo ordenodes
S.C, BASE (ABB)
> En
Tipos de movimiento
(Sistema de Coordenadas)
PROBLEMA DE SINGULARIDAD
‘Soria
Ocurre al moverseycon
Ma eee bres (/2eor
cuandg _{! de
- 5
Se cacueabren ga fam sng
Y so
‘Para corregir el problema,
Camlate prcutacule Por des
posteriormente
‘vuelva a intentar moverse
Linealo Reor”
|
58
© ABB University
Procedimientos basicos
Practica de Laboratorio No. 1
1 EL Ropor VERFQUE«L INTE DE GRO POSTIVOYNEGATWO) DECADA INO DELO SY
ANOTELOS.
2-MOVIENDO SU ROBOT POR EJES, COMPRUEBE Y ANOTE EN EL DIBUIO ANTERIOR PARA CADA UNO DE LOS 6
EJES CUAL ES EL SENTIDO POSITIVO DE GIRO.
{3 REVISE SI HAY CONFIGURADAS TARIETAS DE ENTRADAS SALIDAS ADICIONALES.
4.51 HAY TARIETA CONFIGURADA, VERIFIQUE QUE LAS SEAVALES
DE ENTRADA Y SALIDA FUNCIONEN.
: LAS 8 PRIMERAS ENTRADAS ¥ LAS 8 PRIMERAS SALIDAS,
5.- CONFIGURE SERIALES FAVORITE
6.-CONFIGURE LAS 4 TECLAS PROGRAMABLES ¥ ASIGNE CADA UNA A CONTROLAR LAS SALIDAS 5 ALA 8
‘7.“ACTIVE UN PARO DE EMERGENCIA Y REESTABLEZCA EL BOTON DE PARO PERO SIN PRESIONAR MOTORS ON
E INTENTE MOVERLO..
CCONFIRME QUE NO DEJA MOVER EL BRAZO HASTA QUE HAGA EL PASO FINAL DE PRESIONAR
BOTON MOTORS ON.
‘8COMPRUEBE QUE LO QUE SE VIO EN EL AULA REFERENTE A LOS SISTEMAS DE COORDENADAS
ES CIERTO.
‘9REALICE MOVIMIENTOS LIBRES PROBANDO FUNCIONES DE INCREMENTOS, BLOQUEO DE JOYSTICK.
110-MUEVA EL BRAZO POR EJES HASTA QUE LOGRE UNA ALINEACION DE EJES. ENSEGUIDA CAMBIE
‘A MOVIMIENTO LINEAL E INTENTE MOVERSE. DEBE LOGRAR UN PROBLEMA DE SINGULARIDAD.
1L1.- CONTROLANDO SU PULSO Y SIN USAR INCREMENTOS REALICE UNA TRAYECTORIA DE 10 cm A VELOCIDAD
CONSTANTE EN UNA DURACION EXACTA DE 10 segundos
+ PARA CURSOS EN SITIO : EL INSTRUCTOR INDICARA LA PRACTICA DE ACUERDO A LAS CAPACIDAES
Y FACILIDADES CON LAS QUE CUENTE EL ROBOT DEL CLIENTE.
[ABB
© ABB University
7. Informacion en Sistema IRC5
Grow de Prosrarny
© ABB University
> Procedimientos basicos
Tecla “QUICKSET”
Pesemen jo desl Conegurciotde Melo de elecveior
VYentena So99 na Tacremen les ler fregror?
laa a) were |e
ee e
So. (oi |
nee
s
|e
He rorees
Zaccen hye ok utlocilel en stole bho
Modes gsreecies de
Muldifoste /autdimove
sles
i
a
we
[steo Mode |
a
> EE
Los mensajes de eventos se dividen en:
O Informativos
Ej.: Botén Hold-to-run debe ser presionado.
Informacién de cémo proceder
By Advortencia
Ej.: Modo manual 100% es seleccionado.
El operador es informado acerca del riesgo potencial.
Ej.: Motores On cuando el Paro de Emergencia se activa.
El sistema no puede operar antes que se tome la
accién apropiada para corregir la condicién.
Un mensaje de evento consiste en:
ner entora deicok,
re Or
Codigo deter y fee SAD syle
ambi le enet
vent Hesrage 20202 00d |
parecer eee cee sn
Emergency Stop open 7 Lento
Peery sop ersthas preva been broken a hla, ay
ene nach cpr bere
Sposa remahe nthe Emeraercy Stop Sah,
Probable ces
nv etenot hes ben mde to manaure conta, 29, te ening deve,
© ABB University
© ABB University
Categoria Codigo Descripcion
Operational 1X,XXX \ Sof
System 2X,XXX Cer clo cles get eee
Hardware 3X,XXX Lilla eaLueleles cleclrenicos
Program 4X,XXX fora)
Motion SKXXK—_fedblata de mnatiniedlo
Operator 6X XXX Manele de Lieeterchoal
VO Comm. TX,XXX L te Comuaicacibe zh
Internal NA tore Wo
Existen dos formas de consultar la Bitécora de Eventos
© ABB University
s Procedimientos basicos
INFORMACION DE MEMORIA EN IRC5
MEMORIA PRINCIPAL ( —)
Ware
(0
Sishema Ofera'ee cet Poms
Lorsmehes da sjshote (Le fabrita]
Porn las de Gf T GU Ooees
Creaces yor @/ OSaort'o
Secc'on
BOOT APPLICATION
OIE
S WIR YR
=
»
SH
‘© ABB University
d Procedimientos b os}
INFORMACION DE MEMORIA EN IRC5
Programacién
del robot
SECCION PROGRAMA SECCION SISTEMA
Tool dada foolorse-2
wobtda wobS0.’
(ca:
65
© ABB University
s Procedimientos basicos
Qué ocurre en la programacién del robot al crear un
programa nuevo?
Programacién
del robot
SECCION PROGRAMA SECCION SISTEMA
2
i
5
8
2
e
y cedimientos io
RESPALDO DE INFORMACION
PROCEDIMIENTO 1: 7 o
© ABB University
‘© ABB University
3 Procedimientos basicos
RESPALDO DE INFORMACION
PROCEDIMIENTO 1
2Que informacién se guarda con este procedimiento?
MEMORIA PRINCIPAL (héda)
ROBOTWARE
{ Sistema Operative del Robot )
Parimatos de Sistema Adiclonales
(Creados por el usuario)
——an RESPALDO DE INFORMACION PROCEDIMIENTO 2 Que informacién se guarda con este procedimiento? [MEMORIA PRINCIPAL (dO) ROBOTWARE ( Sistema Operativo del Robot) Parimetros de Sistema (De Fébrca) Pardmetros de Sistema Adletonales (Creados por el usuario) bre en (hdoa) ‘BOOT APPLICATION © ABB University > RESPALDO DE INFORMACION PROCEDIMIENTO 3; . fe} | L Co, Jer fot Contre Hexen om 10 Congres Mot Conon 10 ae @r-ronce ——_setsaret anne > Preocers Canes rogram kes EB osteand ine sated ante or thee corer agmts Stem Dugois 1x adh ola lferet yer md ofr th ae, Gmrettoe M0 ntsc ent s Procedimientos basicos RESPALDO DE INFORMACION PROCEDIMIENTO 3 Que informaci6n se guarda con este procedimiento? MEMORIA PRINCIPAL (doa) "ROBOTWARE ( Sistema Operativo det Robot ) Parimetros de Sista (De Fabs) == 1) Parimetros de Slstema Adicionales (Creados por el usuario) (___seccién PROGRAMA” ___—j » ple le 3 "BOOT APPLICATION, © ABB University © ABB University ¥ RESPALDO DE INFORMACION I PROCEDIMIENTO 4, 7 io Rackug desde Leckys and yesbre =x 5 &) | = eal See P moms Gren ‘aos an rte rte eet a er, ‘Select another folder or accept the default Then pres jporsenr meee ae pte bs enayNCRTT wit naa Rett tens BACR SD SOOT a TAT 3 Procedimientos b: OS RESPALDO DE INFORMACION PROCEDIMIENTO 4 eQue informacién se guarda con este procedimiento? Us at W [MEMORIA PRINCIPAL (hoa) ROBOTWARE ( Sistema Operative del Robot ) | Perimetos de sistema (oe Fibrea) —_| ‘Parimetros de Slatema Adicionales {Creados por el usuario) <4 ‘BOOT APPLICATION Espacto libre en (hd0a) SECCION PROGRAMA ocedimientos basicos Practica de Laboratorio No. 2 1.-CREE UN NUEVO PROGRAMA (NO AGREGUE INSTRUCCIONES). 2.-DESDE EL MENU FLEXPENDANT EXPLORER, CREE EN UNA USB 1 CARPETA Y NOMBRELA PRACT-02, DENTRO DE ELLA CREE 4 CARPETAS: SECC_PROGRAMA, MODULOS. SISTEMA, PARAM_SISTEMA, BACKUP_COMPLETO. b) ¢) d) © ABB University EN LA CARPETA SECC_PROGRAMA GUARDE EL PROGRAMA (SECCION PROGRAMA) EN LA CARPETA MODULOS_SISTEMA GUARDE LOS MUDULOS BASE Y USER EN LA CARPETA PARAM. SISTEMA GUARDE LOS PARAMETROS DE SISTEMA EN LA CARPETA BACKUP_COMPLETO GUARDE UN RESPALDO COMPLETO (BACKUP) ELINSTRUCTOR INDICARA LA PRACTICA DE ACUERDO A LAS CAPACIDAES * PARA CURSOS EN SITIO: ADES CON LAS QUE CUENTE El ROBOT DEL CLIENTE © ABB University 8. Definicion de TCP © ABB University Lysates Cola Me (MLK Clam Too! Center Point (TCP) TOOLO , Tp -E VISTA FRONTAL VISTA LATERAL TOP’ x y 1 Hf AT Prolongacién-X | = Prolongacién 2 ’ Protege eZ Definicién del PUNTO CENTRAL DE LA HERRAMIENTA (TCP): to de referencia que toma el robot para hacer los movimientos que lo harén I : 7 pias posiciones programadas. Por defecto este punto es la Herramienta 0 (Tool), sare encuentra en el centro del plato de montaje (eje 6). Este punto de referencia dependeré Ge la forma y dimensiones de la herramienta que se instale en el robot. 78 {ass} ______. © ABB University Definicion de TCP Método TCP (Orientacién default) Este método define realizando un minimo de 4 puntos de aproximacién para que el robot pueda calcular la posicién del nuevo TCP. Este método es aplicable cuando el punto de referencia se traslada pero continua céntrico y con la misma orientacién que el plano del disco del eje 6. Top x’ z Método TCP & Z (Elongacién en “Z”) Este método se utliza cuando se requiere definir la direccién Z del sistema de coordenadas herramienta, Se define con un minimo de 4 puntos de aproximacién para la definicion de! TCP y adicionalmente se declara un punto elongado sobre el nuevo eje “2”. Este método es aplicable cuando el punto de referencia se traslada y cambia su orientacion con respecto al plano del disco. Tep __ ale Punto de celongacién Z. Método TCP & Z, X (Elongacién en “Z” y “X”) Este método se emplea cuando se quiere definir tanto la direccién Z como la de X. Se define con un minimo de 4 puntos de aproximacién para la definicién del TCP, adicionalmente se debe definir un punto de elongacién para definir la direccién Z y otro mas para definir la direccion X. Este método es aplicable cuando el punto de referencia se traslada y usted requiera definir 2 direcciones especificas de movimiento en su herramienta. 79 © ABB University s Definicion de TCP Procedimiento para crear un TCP ites de comenzar es muy importante que en la ventana ABB -\osaing el campo tool ! 2: entaravorione eB pagan cole daldalrC yen tuerd new) EV 0) ee =x] ee Es a ey Ld x == = eck pny aes fae ae c= tht a. ‘Soa wew Ea - | 3. Declare _¢ en el campo “Name” y en el campo “Module” Eilacotue medio” So Keoraeca ABB) Fras eden coma Comat poe Name: [reuse a Scope: Task =) storage type: [essen = Tasks Foe =I Move: for =I ‘© ABB University iyi Procedimiento para crear un TCP 4 Una vez creado, 61 (ale agercecimentalislh AIO Y Presson, -ferene a pe toate Sec data you want oe Scope: WARIO. ROB "Rae er oo CTRUE[0,0,01,1,0.. BASE Global Delete (Change Dedaration Change Value Copy eat ~ oo steel ule BBB) moscow —_ Somettiretson ax ivrograr Dat elt Deine ‘Tool Frame Definition Tool: tCurso Select a method, modify the postions and tap OX. No. of points: [4_¥] TCP (default orient.) 81 © ABB University > Enna Procedimiento para crear un TCP 9.Colerc oe piala Se olalaaze ta bel ensequida,aesaue etep de su herramienta a punta Ha (Le evs Corte Pesbie son oN ogee petcrce_(lusd0 “Point1" presionando on Aldee=—G2, vuelva a acercario ala punta peroCan aris L d venp.grabe el punto siguiente. Repita los pasos anteriores para grabar los puntos restantes de acuerdo al método elegido. ABB) srrsowmnamm Sonoesnmy “LX [Freer no-no ba ‘Tool Frame Definition. if Toot towse ‘Sec 2 mite moyenne and ap OX. Method: [TCPRZ 7] No.of points: [7 —¥] Puede apoyarse en la. para alejarse del punto actual y acercarse para grabar el punto siguiente. [Absolute accuracy Hotton mode: Coordinate system: Tool: Work object: Payload: Joystick locks 82 (© ABB University »> finicion de TCP Procedimiento para crear un TCP (Ej. Para Método TCP&Z) “Point 1” Epuife 4 ercateon te on pen ‘© ABB University >» pri le TCP Procedimiento para crear un TCP (Ej. Para Método TCP&Z) “Point 2” © ABB University »> icion de TCP Procedimiento para crear un TCP (Ej. Para Método TCP&Z) “Point 3” © ABB University n de TCP Procedimiento para crear un TCP (Ej. Para Método TCP&Z) “ Point 4” El ito 4: Taconde pun fe ante forks opinceded © ABB University Procedimiento para crear un TCP (Ej. Para Método TCP&Z) “ Elongator Point Z” El punto vie Zz Blewor lenegl menk (romae 2-3 cm) gpwlr dele pecisin pete 4 ° ¥ Qrabar © ABB University s Definicion de TCP Procedimie nto para crear un TCP (Cont.) Yana Yatoron i} 1n0140 rXSL.10000790) Stopped (Speed 100%) Method ABB). pom 2 P Program |point 3 CalculatiqPoint 4 Tool: ‘The modified points are not saved. To reuse the modified points later, do you want to save these points? Tap OK toe Positions Method hMax Error Min Error Mean Error xX Tto6 of? © ABB University s yo Co-ed Procedimiento para crear un TCP a vez definido el TCP , proceda a configurar_/ yla “ | (Usandos.C -7@0.l< -7z0la!). Para ello elija su ‘Bol y presione ah hone det Chongc \yolue "he ]C) ee re bd Proatiyre wets se Pa. noe (Change Scope] rm tGurso USE tooto TTRUE(0,401(,0.. BASE ‘Global Delete Change Dedaration | Oates Zee) ~ lee ABBY B)Simomersemne Sateen “IX! Faw Name: tcurso Tap ald tet eve. Daye Seas {10,12,100], pos: 10 a « Ee. Alterminar presione © K Finalmente fduesu fp entrando a Ventana Jogging Yor ncl{o_ en el campo tool. 89 _+ {xu} —_—_——. © ABB University ) Erne Para corroborar la precision de su TCP: Coloqui “Tyeen. “ly desde ventana Jogging Realice Mou sony vetlactout La punta de su TCP debera cambiar de orientacién pero.S.a —ryasladeyse ‘© ABB University 4, he Cl} Practica de Laboratorio No. 3 Coloque la herramienta en la mufieca del robot. Coloque un punto de referencia fijo al alcance del robot. Cree una nueva herramienta llamada tCurso por el procedimiento adecuado. Guardela en el médulo USER. Verifique que los valores de error no sean muy elevados, (Max. error < 0.8). Active la nueva herramienta tCurso. Corrobore la precisién de su con movimiento de Reorientacién. Pruebe con movimiento lineal y con coordenadas tool. Al finalizar cree una carpeta y nombrela PRACT-03, y dentro de ella salve el modulo donde guardo su TCP. ‘PARA CURSOS EN SITIO : EL INSTRUCTOR INDICARA LA PRACTICA DE ACUERDO A LAS CAPACIDAES 'Y FACILIDADES CON LAS QUE CUENTE EL ROBOT DEL CLIENTE. 91 {Ass} ————. © ABB University RobotStudio 92 © ABB University RobotStudio V Seleccione el robot correcto para su proceso simulando el volumen de trabajo del manipulador en su PC. ¥ Minimice los tiempos de arranque de nuevas celdas y productos. YReduzca los riesgos de colisién del robot al visualizar y probar soluciones y layouts. movimientos del robot, para reducir los tiempos de ciclo sin necesidad de detener la produccién. ¥ Incremente la calidad de sus productos al generar trayectorias m precisas de forma automatica. ¥ Agregue procesos especificos al software con los PowerPacs™ para ‘ArcWeld, Plastics-Moul, Die Cast, etc. Con RobotStudio puede programar sus robots desde la PC de su oficina sin que sea necesario detener la producci6n. También permite que nuevos productos y rutinas sean creados, simulados y probados desde cualquier computadora incrementando la productividad. La programacién fuera de linea es la mejor manera de maximizar el retorno de la inversion de sus celdas con robots ABB. El software de simulacin RobotStudio, permite que la sin necesidad de estar frente al robot. n puede crear nuevos programas de futuros productos incrementando la productividad de manera significativa. RobotStudio, contiene todas las herramientas para aumentar la rentabildad de sus robots ya que le permite llevar a cabo tareas como el entrenamiento, la programacién y la optimizacién del layout de sus celdas sin afectar ‘us procesos producives RobotStudio se instala junto con el ‘controlador virtual de ABB, que es una copia cexacta del software que emplean los robots que estén en la produccién. Ello permite ejecutar simulaciones muy realistas, utlizando programas de robots instalados y archivos de configuracién idénticos a os que se emplean en la fabriggy $a) —_—_——. 5 —— rrr CAD Import. Importe disefios mecdnicos con cualquier extension (IGES, STEP, VDAFS, ACIS, CATIA, ) a RobotStudio utilizando el CAD Import del programa. Auto Reach. Averigue si la posicién del fixture, del posicionador 0 de la pieza de trabajo estén dentro del alcance de! manipulador de forma rdpida y sencilla. Collision Detection. Esta funci6n previene costosos dafios a Su equipo ya que automaticamente el software indica los puntos en los que el robot colisiona durante la ejecucion del programa. Autopath. Esta es una de las caracteristicas mas relevantes del programa. Utiizando el modelo en CAD de la pieza es posible generar de manera automatica las posiciones del robot necesarias para que siga la trayectoria en la pieza, en solo cuestién de minutos. Path Optimization. El Simulator Monitor indica de forma visual que posiciones pueden ser mejoradas para que los movimiento del robot, la velocidad del TCP, la aceleracién o el tiempo de ciclo puedan ser optimizados. True Upload and Download. ‘Su programa completo puede ser cargado a un robot real sin necesidad de llevar a cabo conversiones. Esta es una caracteristica nica gracias al Virtual Robot Technology desarrollado y ofrecido unicamente por ABB. © ABB University 95 d INSTRUCCIONES (Programacién Basica IRC5) CREANI PROGRAMA: sualrzer, colle ( Grade a Gren prise ME en > INSTRUCCIONES (Programacién Basica IRC5) niin tle en Lone ongo lea fe) (ee) Grupos de instrucciones: LComervon. F [Common E Low El ~ ow ference wo Samper re [eee fo on | 3 INSTRUCCIONES (Programacién Basica IRC5) Datos de programa: Cada ramesinlitze dale quel eapucistns Moyen *, " . tpluma ; 7 ca Gfervonee 7 joshoc fot Es wi _ braesgea Z en pes dA La ae Se ech Wi e hy , ie a: 0UCbE Wz 2 pe prone fe E 98 > TIPOS DE DATO (Programaci6n Basica IRC5) Datos usados por las Instrucciones boot —__ TOS Lookaves bores bussate brttondata te cameradev camersextdata camerasortdatea cameratarget sock ‘awond cota contspdata cornlesr estrone datapos ‘onum an dour ertdomain erm ents OS entype vente exec level extoint hander type leondate ientno Indowéata Inposdata yates Intra Intypes todev , to: tountt state Joittarget usitem wn loaddata loadin loadsa mmeconit smotsetdata ve L eoake eam tent -7a 5 paridour paridvaldrum pated ee a lop 0s pose woadisp rawbytes restartdata p&s Com sere moemee met fom ae (dgide oct shapedata staat signal sional so C: Sa gh ae «ppl a 94 socketdev socketstatus smn Be De Moun stopmovestatmove.m.- stopolat stoppott enc = - pares DE LOL tocdata {pou trapdata twggdata pAT?? dD E TOK EP, egos twgplosdoun twapstr00 tunetype ‘uishownum veldata On pacer Sof vistondata wot nary } @over) +, vil000, z50, — \ a taalrocetogindica el tipo de movimiento que realizara. see Bd ae realizara el a trasladando el TCP (tool) 24 )'a-a Los argumentos proporcionan informacién a la instruccién: * Dato. obdarge} Dando ‘ .crealgse puede cambiar el dato por uno existente © crear uno nuevo. YABB] SQ] rereercmmmy Stars =x! a eae ‘A| crear un dato de posicién nueva (robtargel), foma/en cuenta que la posicién grabada seré Ja gue one gon ye cAga_el ynonipoledor 1, para ello: ‘apoyéndose en ventana Jogging > COSTCO rot Tam Cy * Datoa 2 da I MoveL *, ap z50, tpluma; Este tipo de dato, indica ‘ TC Plot pedir ¢ (nex inecnlo hacia la posicién solicitada cS. hey Dandodele cf. en el argumento se puede cambiar el dato por uno existente. eee = a woven © , EEOEI),=50 , epluma: + Dato Zanedalat Move *, vi000, EE), tpluma; Este tipo de dato, indica o y Le nto (expresado como el radio en mm de una-esfera con centro enval roblargel) “Sols peel Wye qfiz en el argumento se puede cambiar el dato por uno existente. BB/D [eicearnm =a Move ‘pluma; , vio00, EEE]. Mover * , 1000,» EEO), tplunay Dan Tandon j a Ctra oD oC Coes 7 * Datofoct dude MoveL *, v1000, 250, = Indica, erpeptod a: soucra. a la posicién solicitada Dando. I/e clcen el argumento se puede cambiar el dato por uno existente, ABIDE Se re ett Ts Feared Movel * , v1000 , 250 103 ‘= Qoved) *, v1000, 250, —- La instruccién indica el tipo de movimiento que realizara. Moved indica)que realizara el movimiento trasladando el TCP (tool) con un Moautaalla \sbre Los argumentos proporcionan informacién a la instruccién: Moved *, v1i000, z50, tpluma; ett Se ste Lone *, *, v1000, z10, tool0; La instruccién indica el tipo de movimiento que realizara. MoveC indica que realizara el movimiento trasladando el TCP (tool) con un Movie, wake C LUD Los argumentos proporcionan informacion a la instruccién: + Argumentos robtarget: Este tipo de dato, Indica, (coordenada xy,2) Yorienlacion (cuaterniones q1,92,q3.44J. la cual debera moverse el TCP (tool). El primer robtarget indica 2.n Jo haw pena curva poePaso Movec *, v1000, 210, tool0; El segundo robtarget indica et pualeatalio la curva, ca Movec *, J, v1000, 210, tool0; El Angulo desde el punto inicial hasta el punto final del movimiento Le Secmecnara 2V0 ee eypathsatil la posicién en la que se encuentra el robot justo antes de la ejecucién dé la instruccién MoveC. /j- en el argumento se puede cambiar el dato por uno existente Dando, © crear uno nuevo. al) Ccaent arp’ crt noo © ABB University 10. Instrucciones basicas Una falda se define como la conexién fisica entre el controlador y una sefial digital 6 analégica proveniente de un medio extemo, la cual, es utilizada por el control para ejecutar un proceso en especifico. Ejemplo: sensores, sefiales provenientes del PLC, etc. UnaSa ase define como la conexiénfisica en el controlador que transmite una sefial digital 6 analégica a un medio externo. Ejemplo: sefiales hacia un PLC, hacia una vaivula solenoide, etc. ENTRADAS SALIDAS. [S- 106 > UTS TT fo lela re uo (eae Set do01; Instruccién utilizada Pero achior yo Sorat de Salida + Dato Sigualdar Se t Este tipo de dato, indica lasel tle Que &. gon la instruccién. basal ie Que Sete sl coed Dando doble clic en el argumento se puede cambiar el dato por uno existente. ABBB [Seem Som IX Fomeraicat Creat ne Spa doo 4006 2008 107 > ST tea cat STS Reset do01; Instrucci6n utilizada para \ . Datosauald a oe Este tipo de dato, indcalesabte quccevactec algon la instruccién. Dando doble clic en el argumento se puede cambiar el dato por uno existente. ABB rmresrere scamaen =x! Ssol'da Fomine ‘Curent argument: Signal 108 SetDO do01, 0; SetDO do01, 1; Instruccién utilizada parachiues cdesadiver Una Sedal de Sal da * Argumento signaldo: SetD 0; Este tipo de dato, indica | aga Me GueSem al acd, con la instruccién. Dando doble clic en el argumento se puede cambiar el dato por uno existente. + Argumento value: SetDO do01 i; Dando doble clic en el argumento se puede cambiar el valor. 109 {ans -—______., nes : Instrucci6n InvertDO InvertDO do01; Instrucci6n utlizada faze tauadsces clade de una sefial de salida. S' le ol ud - La Desactiva; s) Sock wy > La Activa * Argumento signaldo: Inver fers co01)y Este tipo de dato, indica, ‘ ou con la instruccién. Hosa te ese rad Dando doble clic en el argumento se puede cambiar el dato por uno existente. Range saan ‘Current argument: ABBR) Siren Siew "|X 110 PulseDO\PLength Instruccién utilizada paraQcds i us Lsecd oils al conciuir el tiempo indicado. * Argumento signaldo: PulseDo \PLength:= 0.2 ep Este tipo de dato, indica la salida que sera alterada con la instruccién. Dando doble clic en el argumento se puede cambiar el dato por uno existente. Elle a cd + Valor PLenght: PulseDO\PLength: =. 001; Este valor indica se puede usar un dato de tipo numérico o inaresar el ae manvalmente Para ingresar el alto seleccione el argumento a — aX) (ABB Ble eee Steno x —— cd IEEE ESOC ee ee > DCMU eect Te WaitDI di05, 1 ieee paracierr qa usa Seta dewahda Jeaga neste wando . Argumentocsc d vB Este tipo de dato, indica ry ., que se revisara. Dando doble clic en el argumento se puede cambiar el dato por uno existente. Cent rponesti Spl ar yaso2 aioe 8800 > é 2 3 3 2 é 5 = s WaitDI di05 Is Este valor, indica, WaitTime Ropes ; Instruceién utilzada para esperor Un liems deleceirodo En el campo Bs 20a colo el dato pelle vo ae on p Jyessone__| -2-3_». para ingresar el digito numérico directamente. Una vez escrito el numero, presione OK 113 s Instrucciones : Instruccién WaitUnt WaitUntil Boas Instruccién utlizada paracsaemr gare une Coadlictin iadscada pacmed* de una exact inn Se cumin Enelcampo PRESS deberd colocar_la cyaesion ‘nadeion “a eval vox Usted puede utilizar expresiones que involucren el tipo de dato que desea. signaldi, num, signaldo, bool, etc. 114 © ABB University Instrucciones basicas Practica de Laboratorio No. 4 1.-CREE UN NUEVO PROGRAMA. 2.-EN LA VENTANA JOGGING CAMPO TOOL, ACTIVE SU TCP CREADO EN LA PRACTICA ANTERIOR 3.-EN LA RUTINA MAIN INSERTE INSTRUCCIONES Y GRABE POSICIONES PARA: a) COMENZAR CON UN’MOVIMIENTO A pSegura b) CONTINUAR CON UN MOVIMIENTO A pCerca c) REALIZAR MOVIMIENTOS PARA DIBUJAR UN TRIANGULO. d) REGRESAR A pCerca e) REALIZAR MOVIMIENTOS PARA DIBUJAR UN CUADRO. f) REGRESAR A pCerca g) REALIZAR MOVIMIENTOS PARA DIBLJAR UN CIRCULO. h) REGRESAR A pCerca i) REALIZAR 3 MOVIMIENTOS DE REORIENTACION SOBRE LA PUNTA DE CALIBRACION DEL TCP (SIN QUE SE TRASLADE EL TCP). j) REGRESAR A pCerca k) FINALIZAR con Movimiento a pSegura. - MIENTRAS LA PLUMA ESTE DIBUJANDO CADA UNA DE LAS FIGURAS, DEBERA ESTAR ENCENDIDA UNA SALIDA DIGITAL DIFERENTE. PARA INSERTAR INSTRUCCIONES/EDITAR LINEAS/PROBAR SU PROGRAMA (Revise info en Pag. 96) ‘AL FINALIZAR CREE UNA CARPETA Y NOMBRELA PRACT-04 Y DENTRO DE ELLA GUARDE LA INFORMACION DE SU PROGRAMACION. RESTRICCIONES: NOMBRE SUS robtarget DE MANERA QUE SE PUEDA ENTENDER A QUE FIGURA PERTENECE CADA ROBTARGET. Ejemplo: Para los robtarget del tridngulo: pTRIOA, pTRIO2.... + PARA CURSOS EN SITIO : EL INSTRUCTOR INDICARA LA PRACTICA DE ACUERDO A LAS CAPACIDAES YY FACILIDADES CON LAS QUE CUENTE EL ROBOT DEL CLIENTE. 115 ss} ———. 11. Edicio Aysienun gay @ 116 © ABB University > EE 1) 2) 3) 4) 5) 6) 7) 8) 9) 410) 11) 12) 43) 14) 15) 16) (3) ‘Manual ‘Guard Stop Wikinvest (WH) Sopa (202) (Spend 10% ramName in T_ROBS/MainModule/main lz] PROC main() =)Copy Go ym 1 | ENDPROC [Paste Paste Above s |ENDMODULE [change Sete. | Delete Mirror. ‘Comment [Redo || Select Single Trstruaion | Edit ~ ies Cut Cortar lineas Copy Copiar lineas Paste Pegar lineas Change selected Muestra los datos seleccionados por la instruccién ABC... Sirve para insertar comentarios o editar elementos Change to Move Cambia el tipo de movimiento entre Moved y Movel_ Undo Deshace la ultima accién realizada Select Range Selecciona un grupo de lineas consecutivas desde la actual hasta la que se indique Go to Top Mueve el cursor hasta al inicio de la rutina en edicién Go to Bottom hasta el final de la rutina en edici6n. Paste Above —_Pegar encima de la linea seleccionada por elcursor Delete Elimina lineas Mirror Opcién de uso avanzado Refleja posiciones respecto a X.Y,Z del Sist. Coord. Comment Row Convertir una linea en comentario Redo “Rehaver’, re inserta una edicién hecha en el programa Select Single Restaura el modo de selecci6n a un renglén 7 3. © ABB University ‘eee Algunas funciones que pueden ser utilizadas para realizar edicion en el programa fueron movidas a la opcién de ‘DEBUG’, esto debido al surgimiento de nuevas para la opcién de “EDIT”, dependiendo de la revision de software vigente en el equipo la ubicacién de estas opciones puede cambiar. ‘Tasks and Programs, 2 PROC main() A 4 «| ENDPROC [cursor to MP | Go to positior s |ENDMODULE ‘Call Routine...]| Cancel Call. View Value _|[Check Prog._|| View Syste Search Rout REMY] Cebus ” [oe eee [rt a 1) View Value Permite la edi de valor sobre datos 2) Check Program Realiza una revisién de la sintaxis del programa 3) View System Tasks Muestra las tareas que se encuentran vigentes en la memoria de trabajo 4) Search Routine Muestra las rutinas existentes en el programa 118 [ABB | ° © ABB University Actualizacion de Contadores de revolucion 119 ECO eee aac Contadores de revolucion Encargados de rastrear la posicién exacta de cada uno de los ejes del brazo. CON CONTADORES DE REVOLUCION ACTUALIZADOS EL ROBOT: + SABE LA POSICION EN GRADOS DE CADA UNO DE LOS 6 EJES. + SABE LAS DIRECCIONES X,Y,Z DE LOS SISTEMAS DE COORDENADAS. + PUEDE MOVERSE EN MOVIMIENTO LINEAL. + SABE LA UBICACION DE LAS POSICIONES QUE HAN SIDO GRABADAS. + PUEDE EJECUTAR PROGRAMA. + LOS LIMITES DE EJE POR SISTEMA SE DETECTAN 120 {as} —___. d Taelel= nN MeSH AUT ue ae Contadores de revolucion CON CONTADORES DE REVOLUCION NO ACTUALIZADOS EL ROBOT: + NO SABE CUANTOS GRADOS TIENE CADA EJE. + NO SABE LAS DIRECCIONES X,Y,Z DE NINGUN SISTEMAS DE COORDENADAS. + NO PUEDE MOVERSE EN MOVIMIENTO LINEAL. + NO PUEDE SABER LA UBICACION DE LAS POSICIONES GRABADAS EN EL PROGRAMA. + NO PUEDE EJECUTAR NADA DE PROGRAMA. * LOS LIMITES DE EJE POR SISTEMANO SE DETECTAN. 5, Oke 6ng mk 3 PROCEDIMIENTOS: Cornette) Contadores de revolucién Causas que pueden generar la pérdida de los Contadores de Revolucion AL OCURRIR UNA COLISION EN EL BRAZO. AL APAGAR BRUSCAMENTE EL CONTROLADOR MIENTRAS SE ESTA MOVIENDO EL BRAZO. ALINTERRUMPIRSE LA COMUNICACION ENTRE EL CONTROLADOR Y EL BRAZO MIENTRAS EL ROBOT ESTA ENCENDIDO. CUANDO SE APAGA EL CONTROLADOR SI LAS BATERIAS DE LA SMB YANO TIENEN CARGA. POR UN PROBLEMA ELECTRICO, CIE OSH ECM net cuca y 3 Pasos para Actualizar los Contadores de Revolucion 41. Abrir ventana Jogging en el Flexpendant y configurar Movimiento por ejes. INFORMACION EN ROJO OCURRE CUANDO LOS CONTADORES DE REVOLUCION ESTAN PERDIDOS Y SIGNIFICA: “INFORMACION FALSA” Nunca use esta informacion para posicionar los ejes ala posicion de calibracién. 123 Pasos para Actualizar los Contadores de Revolucion 2.- Con el Joystick debe mover cada uno de los 6 ejes a la marca de calibracién de Fabrica, indicada en el Manual de Producto IRB. . (Capitulo 5: Informacién de calibracién — Escala de calibracion y posicién correcta de los ejes) Escalas de calibracién del IRB 140 La figura siguiente muestra las posiciones de la escala de calibracién del IRB 140. Pancho! 4 PROCEDIMIENTOS: Actualizacion de Contadores de Revolucion Pasos para Actualizar los Contadores de Revolucién 3.- Ingresar a la ventana de Actualizacién de Contadores de Revolucién. 4. Habilite la casilla de los 6 ejes, corrobore nuevamente la posicién correcta de marcas de calibracién y presione Actualizer. © ABB University cedimientos 3 Para revisar la correcta actualizacion de contadores del equipo se puede hacer de forma manual moviendo el equipo con la ayuda de la unidad de Programacién o utilizando la instruccion MoveAbsJ. Calibracion Procedimiento para revisar actualizacion de contadores: Identifique las marcas de calibracion del equipo Vaya a la pantalla de Program Editor Agregue la instruccién MoveAbsJ Seleccione el * y presione Debug Presione View Value Edite los valores de los argumentos “rax_1 a rax_6” poniendo el valor de todos en 0 Elija zona fine. Ejecute la instruccion y revise la posicién del equipo. (Ninguna marca debe salir de su escala). 9. No olvide eliminar la instruccién al final. PRPons= PN Wanaal ‘Guard sop UncinProfl(WXSLP-.) Stopped (Speed 100%) | IZQUTERDO_01 in T_ROB1/MainModule/main Tasks and Propramsv| Modules >| @] PROC main() IMoveAbsJ *\NoEOffs, v8 19} Moved *,v800,z50,tool0; | ArcLStart *, v300, seam1, ArcL *, v200, seaml, weld2! ArcL *, v300, seaml, weld4, 14] ArcLEnd *, v400, seami e 15] MoveAbsJ *\NoEOffs, = aoe Edit ~ Del : i i a 4 & ‘Ayssonun aay o 127 UT coe (SEE ay [ABB B |e mea 1. Para crear una rutina nueva, 2 7a Zulgn la Ventana Program Editor 2. En la ventana que se despliegue, presione Z//e — Me 3.- Declare up y Ubicacién donde se guardara la rutina. y enseguida presione OK. Atle s Tite nace LEE? 4.- Para insertar instrucciones a a rutina creada, presione, Aa leclicenle ube. deseada, 6 Sheet i nul whine \deseada y enseguida presione <. gulsne Finalmente, Pada icra las tacbucctaseue realizard la rutina. (ABBD Serie staan LX) (ABDD [erro seven LX) ae a — al T] PROC _Routinaa() Common ao rene 5 — er comes =—-_—] oui —_ coe fo |e Peet oe ‘saris == << { etre nn CC a a 129 x etn a ES 5,-,Si desea cortgr 6;copiar nfucciones que se encuentran en otra rutina, puede abuc\s oul: le L apoyarse con el ra 7 Mew 6. Enseguida entrar a la nueva rutina y con la ayuda del Menu des = pes] Pegar las instrucciones Cortadas / Copiadas. [ABB)SB[ercemcrmenn rms LX] [ABBR [eireariwene samc SLX) [Fi acum [newer -81/itonseaa = Te a mand Rows vane Prcedre powtnac otsosle Prine Rowtinax tote Prentice me [sow Rote | os 130 4 etter aCe anne NOTA: Sila rutna fue quardede focus nicl Aa deca sie ala roll Para poder vsualizar la rutina, primera )aguae ala peslefa alia y entre al modulo donde guardo su rutina. Enseguiday),, ‘ diy que desea visualizar. iS = IX Treinen =] ae ‘PROC main () as en lx] Move *, v1000, 250, od se ‘Spem mode | Moves *; vi000, 250, toolt ononle — .| moves *, vi000, 250, tool0; Pe Stn ENDPROC Nesters Tet at ProcCall ProcCall Instruccién utlizada parallamarla elecucine do ob esQvhA? Para utilizar la instruccién, Selec bene Con el cu/carla linea donde desea el llamado de la rutina y del panel de instrucciones Perr lealseey rl mostrara una ventana con las rutinas existentes, c ara su ejecucion y etcla Ne eas ue leis ps Tamer presione OK (Abi [reresriewy meray LX JAB BYR | rounrcown sometime en) x) Sees a Fy roe minty =e Ye ovina Sraoutinec oveinax rstnexon NE ia « i Anélisis de instruccién ProcCall: 132 © ABB University 5 rr Utiizamos el diagrama de flujo para asistimos en la Pragsamacso, Algunos de los simbolos que son comunmente utilizados se muestran a continuacién: DECISIONES Instrucciones Rutinas Verdadero Condicional if Falso Ejemplo: 4 pSegura ' pAcercamiento Triangulo rCuadrado pSegura G 133 © ABB University —_ Practica de Laboratorio No. 5 1.-SOBRE EL PROGRAMA QUE YA TIENE, CREE 4 RUTINAS: rTRIAN, rCUADRO, rCIRCULO, rREOR. 2.-DENTRO DE CADA RUTINA COLOQUE LAS INSTRUCCIONES CORREPONDIENTES PARA CADA DIBWO. 3.-EN LA RUTINA MAIN SOLO DEBERA APARECER - EL MOVIMIENTO A pSegura ~ EL LLAMADO DE CADA UNA DE LAS RUTINAS - FINALIZAR con Movimiento a pSegura. ~ MIENTRAS LA PLUMA ESTE DIBUJANDO CADA UNA DE LAS FIGURAS, DEBERA ESTAR ENCENDIDA UNA SALIDA DIGITAL DIFERENTE. 4.- AL FINALIZAR CREE UNA CARPETA Y NOMBRELA PRACT-05 Y DENTRO DE ELLA GUARDE LA INFORMACION DE SU PROGRAMACION. RESTRICCIONES: EVITE INSERTAR INSTRUCCIONES (QUE PUEDA METER DENTRO DE LAS RUTINAS) SOBRE LA RUTINA MAIN. RUCTOR INDICARA LA PRACTICA DE ACUERDO A LAS CAPACIDAES * PABA CURSOS Ee ee CON LAS QUE CUENTE EL ROBOT DEL CLENTE 134 > Tecla QuickSet - Step Mode @ Ejecucién de la rutina, | pao ae gpine aides P* Después de la ultima linea, el PP vuelve a la primera. Step Into Jina fi soIees A len Loh? Ejecucion de la rutina, Hlesst pace gidse Sale | Después de la ultima linea, el PP se sale de la rutina y se —_ Detiene. No permitido en rutina Main. Step Out Ejecucién de la rutina, ¢s También podría gustarte