DEPARTAMENTO DE ELÉCTRICA, ELECTRÓNICA Y
TELECOMUNICACIONES
ROBÓTICA
TAREA No.3
TEMA: Ejercicios matriz de rotación
Docente: Ing. Luis Alberto Orozco Brito
Alumno: Bryan Fernando Defaz Córdova
NRC: 7623
Fecha: 08/06/2022
Mayo 2022 – Septiembre 2022
1
�1. Tema: Ejercicios matriz de rotación
2. Objetivo:
❖ Realizar los ejercicios propuestos por el docente aplicando la matriz de rotación para
representar un giro, una orientación y para transformación de vectores y coordenadas.
3. Desarrollo:
1. Dada la siguiente matriz de 3 × 3
0.3536 −0.6124 0.7071
𝑀 = [0.9268 0.1268 −0.3536]
0.1268 0.7803 0.6124
Determinar si constituye una matriz de rotación (considerando errores de redondeo razonables).
Justificar la respuesta.
Para determinar si la matriz M es una matriz de rotación debe cumplir con las propiedades de:
• Transpuesta de la matriz de rotación (R). 𝑅𝑅𝑇 = 𝐼
• Determinante de la matriz de rotación (R). 𝑑𝑒𝑡(𝑅) = ±1
Se realiza las siguientes propiedades
• 𝑀 ∗ 𝑀𝑇 = 𝐼𝑑𝑒𝑛𝑡𝑖𝑑𝑎𝑑
0.3536 −0.6124 0.7071 0.3536 0.9268 0.1268
𝑀 ∗ 𝑀𝑇 = [0.9268 0.1268 −0.3536] ∗ [−0.6124 0.1268 0.7803]
0.1268 0.7803 0.6124 0.7071 −0.3536 0.6124
1.00006 0.00003 0.000009
𝑇
𝑀 ∗ 𝑀 = [0.00003 1.00006 −0.00008]
0.00008 −0.00008 0.99998
Aproximándole obtenemos lo siguiente:
𝟏 𝟎 𝟎
𝑴 ∗ 𝑴𝑻 ≈ [𝟎 𝟏 𝟎]
𝟎 𝟎 𝟏
Se observa que, si cumple la primera propiedad, a continuación, se comprueba la propiedad del
Determinante.
• Det(R)=±1
0.3536 −0.6124 0.7071
𝐷𝑒𝑡(𝑀) = 𝐷𝑒𝑡 [0.9268 0.1268 −0.3536]
0.1268 0.7803 0.6124
2
� 𝐷𝑒𝑡(𝑀) = (0.3536)(0.1268)(0.6124) + (0.9268)(0.780)(0.7071)
+ (−0.6124)(−0.3536)(0.1268) − (0.1268)(0.1268)(0.7071)
− (0.7803)(−0.3536)(0.3536) − (0.9268)(−0.6124)(0.6124)
𝐷𝑒𝑡(𝑀) = 1.000045 ≈ 1
∴ 𝑫𝒆𝒕(𝑴) ≈ 𝟏
Se puede observar que si cumple la segunda propiedad y se demuestra que la matriz “M”
efectivamente es una matriz de rotación.
2. Considerar la matriz de rotación R tal que
0 −1 0
𝑅=[ 0 0 1]
−1 0 0
Hay que considerar que dicha rotación fue aplicada a un sistema de referencia.
(a) Esbozar el sistema de referencia inicial y el sistema final luego de aplicar la rotación
mostrada.
• Sistema de referencia inicial {A}
• Sistema de final luego de aplicar la rotación {B}
(b) Determinar una posible secuencia de rotaciones canónicas en x, y, z que pudieron dar
origen a R.
• Primero realizamos una rotación alrededor del eje Z, 90° anti-horario.
• Luego giramos alrededor del eje Y, 90° en sentido horario y obtenemos el sistema
final {B}.
3
�3. Se tiene un vector posición dado por
2
𝐵
𝑃 = [ 4]
3
con respecto al sistema {B}, y se tiene la matriz de rotación
1 0 0
𝐵
𝑅𝐴 = [0 0.6 0.8]
0 −0.8 0.6
(a) Calcular el vector posición Ap con respecto al sistema {A}.
Para poder hallar Ap se utiliza la siguiente expresión:
𝐴 𝐴
𝑃= 𝑅𝐵 ( 𝐵 𝑃)
también conocemos que:
𝐴
𝑅𝐵 = ( 𝐵 𝑅𝐴 )𝑇
Por lo tanto se llega a la expresión:
A
p= ( 𝐵 𝑅𝐴 )𝑇 ( 𝐵 𝑃)
Reemplazamos:
1 0 0 2
𝐴
𝑃 = [0 0.6 −0.8] ∗ [4]
0 0.8 0.6 3
Por lo tanto, la respuesta es:
2
𝐴
𝑃 = [0]
5
(b) Usando el vector Ap obtenido y la matriz de rotación, encontrar Bp. Verificar que es el
resultado sea coherente.
Para hallar Bp utilizamos la siguiente formula:
𝐵 𝐵
𝑃= 𝑅𝐴 ( 𝐴 𝑃)
Reemplazamos valores y calculamos:
1 0 0 2
𝐵
𝑃 = [0 0.6 0.8] ∗ [0]
0 −0.8 0.6 5
4
� Por lo tanto, la respuesta es:
2
𝐵
𝑃 = [ 4]
3
Los valores obtenidos por 𝐵 𝑃 son correctos.
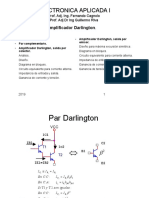
(c) Realice un gráfico para ilustrar la transformación de los anteriores literales.
Vamos a utilizar Matlab para la realización el grafico final.
M=[1 0 0 0; 0 1 0 0; 0 0 1 0; 0 0 0 1];
% Sistema B rotado respecto A
R=[1 0 0 0; 0 0.6 -0.8 0; 0 0.8 0.6 0; 0 0 0 1];
% Grafica
trplot(M);
hold on;
trplot(R,'color','k');
%Grafica ap y bp
quiver3(0,0,0,2,0,5,'color','r');
quiver3(0,0,0,2,4,3,'color','g');
grid on;
Se obtiene la siguiente gráfica:
• Color azul es el eje fijo de referencia.
• Color negro es el eje rotado con la matriz de
rotación
• vector de color rojo es Ap
• vector de color verde es Bp.
4. Sean los sistemas de referencia {A}, {B} y {C}. Dadas las matrices de rotación.
Encontrar la matriz de rotación BRC
Para hallar BRC se lo hace de la siguiente manera:
5
� B
RC=( BRA ) (ARC)
Donde:
B
RA= ARBT
Por lo tanto:
B
RC=( ARBT) (ARC)
Reemplazamos valores y encontramos la respuesta:
1 0 0
1 √3 0 −1 0
𝐵 0 −
𝑅𝐶 = 2 2 ∗ [1 0 0]
√3 1 0 0 1
[0 2 2 ]
0 −1 0
𝐵
𝑅𝐶 = [ 0.5 0 −0.8660]
0.8660 0 0.5
5. Se tiene un sistema de referencia fijo {F}. A un sistema {A} inicialmente coincidente con {F}
se le aplica una rotación de θ grados alrededor del eje z. Seguidamente, al sistema resultante
se le aplica una rotación de −90°alrededor del eje x del sistema {F}. Finalmente, a este nuevo
sistema se le aplica una rotación de 90° alrededor del nuevo eje y. La matriz de rotación
resultante es
0 0.866 −0.5
[−1 0 0 ]
0 0.5 0.866
Usando esta matriz resultante, determinar el valor del ángulo θ.
Primeramente, identificamos los datos del ejercicio:
𝑅𝑥 (−90°)𝑅𝑍 (θ)𝑅𝑦 (90°)
Por lo tanto, se tiene las siguientes matrices:
1 0 0 cos(𝜃) − sin(𝜃) 0 0 0 1 0 − sin(𝜃) cos(𝜃)
(0 0 1) ∗ ( sin(𝜃) cos(𝜃) 0) ∗ ( 0 1 0) = (−1 0 0 )
0 −1 0 0 0 1 −1 0 0 0 − cos(𝜃) −sin(𝜃)
Para encontrar el ángulo theta se compara las matrices:
0 − sin(𝜃) cos(𝜃) 0 0.866 −0.5
(−1 0 0 ) = (−1 0 0 )
0 − cos(𝜃) −sin(𝜃) 0 0.5 0.866
6
� − sin(𝜃) = 0.866 → 𝜃 = −60° ; 𝜃2 = 240°
cos(𝜃) = −0.5 → 𝜃3 = 120° ; 𝜃4 = 240°
El ángulo tiene tres posibles valores:
𝜃 = −60° ; 𝜃2 = 240° ; 𝜃3 = 120°
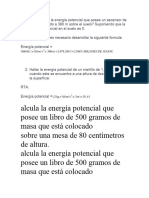
6. Considerar la siguiente figura
(a) Determinar las matrices de rotación 1R3, 0R2, 2R1.
Primeramente, encontramos los ángulos para poder ayudarnos en la resolución del
ejercicio.
Empezamos encontrando 1R3
1
R3= 𝑅𝑥 (90° + 36,87°) = 𝑅𝑥 (126,87°)
Resolvemos las matrices:
7
� 1 0 0 1 0 0
1
R3= (0 cos(126,87) −sin (126,87)) = (0 −0.60 −0.80)
0 sin (126,87) cos (126,87) 0 0.80 −0.60
Continuamos encontrando 0R2 en donde tenemos:
0
R2= 𝑅𝑧0 (180° + 36,87°)𝑅𝑦0 (90°) = 𝑅𝑧0 (216,87°)𝑅𝑦0 (90°)
Resolvemos las matrices:
cos(216,87) −sin (216,87) 0 cos(90) 0 sin(90)
0
R2= (sin (216,87) cos(216,87) 0 ) ( 0 1 0 )
0 0 1 −sin(90) 0 cos(90)
𝟎 𝟎, 𝟔𝟎 −𝟎, 𝟖𝟎
0
R2= ( 𝟎 −𝟎, 𝟖𝟎 −𝟎, 𝟔𝟎)
−𝟏 𝟎 𝟎
Ahora encontraremos 2R1, pero por facilidad primero se encontrará 1R2 para luego sacar
la transpuesta y finalmente encontrar 2R1 :
1
R2= 𝑅𝑥1 (360° − 53,13°)𝑅𝑧1 (180°) = 𝑅𝑥1 (306.87°)𝑅𝑧1 (180°)
Resolvemos las matrices:
1 0 0 cos(180) −sin(180) 0
1
R2= (0 cos(306,87) −sin(306,87)) ( sin(180) cos(180) 0)
0 sin(306,87) cos(306,87) 0 0 1
−1 0 0
1
R2= ( 0 −0,60 0,80)
0 0,80 0,60
−1 0 0 𝑇
2 1 T
R1= R2 = ( 0 −0,60 0,80)
0 0,80 0,60
−𝟏 𝟎 𝟎
2
R1=( 𝟎 −𝟎, 𝟔𝟎 𝟎, 𝟖𝟎)
𝟎 𝟎, 𝟖𝟎 𝟎, 𝟔𝟎
(b) Usando la composición de las matrices anteriores encontrar, 0R3 y verificar el resultado
por inspección (usando el significado de las columnas de la matriz).
Para poder encontrar la matriz de rotación 0R3 se tiene la siguiente expresión:
0
R3=0R2*2R1*1R3
Continuando se resuelve las matrices:
0 0,60 −0,80 −1 0 0 1 0 0
0
R3=( 0 −0,80 −0,60) ( 0 −0,60 0,80) (0 −0.60 −0.80)
−1 0 0 0 0,80 0,60 0 0.80 −0.60
8
� 0 0,60 0,80
0
R3=( 0 −0,80 0,60)
−1 0 0
Para verificar se utilizará la siguiente expresión:
0
R3= 𝑅𝑧0 (180° + 36,87°)𝑅𝑦1 (270°) = 𝑅𝑧0 (216,87)𝑅𝑦1 (270°)
cos(216,87) −sin(216,87) 0 cos(270) 0 sin(270)
0
R3= ( sin(216,87) cos(216,87) 0) ( 0 1 0 )
0 0 1 −sin(270) 0 cos(270)
0 0,60 0,80
0
R3=( 0 −0,80 0,60)
−1 0 0
Se puede observar que se obtuvo la misma matriz por lo que se comprueba que los
resultados obtenidos son los correctos
7. En la siguiente figura se observa, como el sistema móvil O'UVW se encuentra inicialmente
orientado con respecto al sistema fijo OXYZ. Después de esto, el sistema móvil O’UVW
realiza los siguientes movimientos en el orden señalado:
• Primer Movimiento: Rotación respecto al eje OZ de - π/2
radianes
• Segundo Movimiento: Rotación respecto al eje O'V de 45
grados
• Tercer Movimiento: Rotación respecto al eje O'U de -90 grados
Después del tercer movimiento:
a) Determine la orientación final del sistema O'UVW respecto al sistema O'XYZ.
Como se puede observar en la figura anterior los ejes de los dos sistemas no concuerdan por
lo tanto primeramente se debe encontrar la matriz de rotación inicial.
Matriz de rotación:
0 1 0
𝑅0 = (0 0 1)
1 0 0
Realizamos la rotación indicada por el ejercicio entonces se tiene:
O’XYZ
R O’UVW= 𝑅𝑧 (−90) ∗ 𝑅0 ∗ 𝑅𝑣 (45°) ∗ 𝑅(−90)
Resolvemos:
O’XYZ
R O’UVW=
9
� cos(−90) −sin(−90) 0 0 1 0 cos(45) 0 sin(45) 1 0 0
( sin(−90) cos(−90) 0) (0 0 1) ( 0 1 0 ) (0 cos(−90) −sin(−90))
0 0 1 1 0 0 −sin (45) 0 cos(45) 0 sin(−90) cos(−90)
−0.7071 −0.7071 0
O’XYZ
R O’UVW= ( 0 0 −1)
0.7071 −0.7071 0
b) Determine la orientación final del sistema O'XYZ respecto al sistema O'UVW.
Debemos encontrar la transpuesta de O’XYZ R O’UVW :
−0.7071 −0.7071 0 𝑇
O’UVW O’XYZ T
R O’XYZ =( R O’UVW) = ( 0 0 −1)
0.7071 −0.7071 0
−0.7071 0 0.7071
O’UVW
R O’XYZ = (−0.7071 0 −0.7071)
0 −1 0
c) Determine las componentes del vector ruvw expresado en el sistema O’UVW, si dicho
vector en el sistema fijo O'XYZ es rxyz= [4 3 1] centímetros
Para encontrar el vector r UVW se tiene la matriz de rotación:
−0.7071 0 0.7071
O’UVW
R O’XYZ = (−0.7071 0 −0.7071)
0 −1 0
Con la cual, junto al dato del vector rxyz se puede crear la siguiente expresión:
r UVW= (O’UVW R O’XYZ) (r XYZ)
−0.7071 0 0.7071 4
r UVW=[−0.7071 0 −0.7071] [3]
0 −1 0 1
−𝟐. 𝟏𝟐𝟏
r UVW=[−𝟑. 𝟓𝟑𝟓]
−𝟑
3 2
8. En la figura, 𝑟1 = [0] 𝑦 𝑟2 = [1], informan la posición del origen del sistema O’UVW
0 3
respecto al sistema O’XYZ. Hallar en base a esto:
10
�a) La posición y orientación del sistema O’UVW respecto al sistema O’XYZ en los estados 1 y
2 utilizando coordenadas cilíndricas y matriz de rotación
PRIMER ESTADO
3
Se tiene el vector 𝑟1 = [0] por lo tanto se realiza lo siguiente:
0
𝑝 = √𝑥 2 + 𝑦 2 → 𝑝 = √32 + 02 = 3
𝑦 0
𝜃 = atan ( ) → 𝜃 = atan ( ) = 0
𝑥 3
Se observa que en el estado 1 se puede determinar cómo los ejes coinciden, entonces la matriz
de rotación es la identidad, a continuación, se muestra la posición en coordenadas cilíndricas
y la rotación:
3 1 0 0
O’XYZ
𝑟1 (𝜃) = [0] ; R O’UVW = (0 1 0)
0 0 0 1
SEGUNDO ESTADO
2
Para la posición en coordenadas cilíndricas tenemos el vector 𝑟2 = [1] , entonces se realiza lo
3
siguiente:
𝑝 = √𝑥 2 + 𝑦 2 → 𝑝 = √22 + 12 = √5
𝑦 1
𝜃 = atan ( ) → 𝜃 = atan ( ) = 26.56°
𝑥 2
En el estado 2 los ejes hay rotado, sin embargo por simple inspección se puede determinar la
matriz de rotación, a continuación se muestra la posición en coordenadas cilíndricas y la
rotación:
√5 0 1 0
O’XYZ
𝑟2 (𝜃) = [26.56] ; R O’UVW = (0 0 1)
3 1 0 0
11
�b) La posición del sistema O’XYZ respecto al sistema O’UVW de los estados 1 y 2 en
coordenadas esféricas.
PRIMER ESTADO
Tenemos la siguiente expresión:
1 0 0
O’UVW O’XYZ T
R O’XYZ = ( R O’UVW) = (0 1 0)
0 0 1
1 0 0 −3 −3
UVW
r = (0 1 0) [ 0 ] = [ 0 ]
0 0 1 0 0
𝑟 = √(−3)2 + 0 + 0 = 3
0
𝜃 = cos −1 ( ) = 90
−3
0
𝜑 = 𝑎𝑡𝑎𝑛 ( )=0
−3
Por lo tanto:
−3
UVW
r1=[90°]
0
SEGUNDO ESTADO
Tenemos la siguiente expresión:
0 1 0
O’UVW O’XYZ T
R O’XYZ = ( R O’UVW) = (0 0 1)
1 0 0
0 0 1 −1 −3
UVW
rXYZ = (1 ) [
0 0 −1 ] = [−2]
0 1 0 −3 −1
𝑟 = √(−3)2 + (−2)2 + (−1)2 = √14
−1
𝜃 = cos −1 ( ) = 105,5°
√14
−2
𝜑 = 𝑎𝑡𝑎𝑛 ( ) = 33,69°
−3
Por lo tanto:
12
� √14
UVW
r2=[105,5°]
33,7
c) El vector desplazamiento en coordenadas cartesianas, para que el sistema móvil O’UVW
pase del estado 1 al estado 2.
Utilizamos la siguiente fórmula para poder obtener el vector desplazamiento:
2 3
r= UVW r2- UVW r1=[1] − [0]
3 0
Calculando nos queda:
−1
r=[ 1 ]
3
4. Conclusiones:
❖ La matriz de rotación nos expresa la orientación de un sistema {B} con respecto a un
sistema {A}, para determinar si una matriz R es una matriz de rotación debe cumplir con
las propiedades de: transpuesta, esto quiere decir que si multiplicamos la dicha matriz por
su transpuesta tiene que darnos la matriz identidad 𝑅𝑅𝑇 = 𝐼, también debe cumplir que el
determinante sea igual a uno.
❖ Un objeto puede rotar varias veces por lo que se tiene varias matrices de rotación, estas
matrices se las puede hallar por simple inspección, también se las puede encontrar
identificando un eje de revolución para aplicar solamente las fórmulas conocidas y por
ultimo se realiza un análisis con los ángulos correspondientes de giro, esto se puede realizar
siempre y cuando cumplan con la regla de la mano derecha.
5. Recomendaciones:
❖ Se recomienda leer detenidamente cada ejercicio para comprender e identificar que nos
solicita la actividad y poder resolverla.
❖ Se recomienda revisar la materia vista en clase acerca de la matriz de rotación y sus
propiedades.
6. Bibliografía:
[1] Luis Alberto Orozco Brito, “Robótica 7623: Clase 6A Localización 1”, Universidad de las
Fuerzas Armadas – ESPE, DEEL, Quito, Ecuador. 2022
[2] Luis Alberto Orozco Brito, “Robótica 7623: Clase 7 Localización 2”, Universidad de las
Fuerzas Armadas – ESPE, DEEL, Quito, Ecuador. 2022
13