También podría gustarte
- Aplicacion de Las Derivadas en La EconomiaDocumento10 páginasAplicacion de Las Derivadas en La EconomiaJosé Ramón Enrique Guacarán Armas25% (8)
- Guía para La Edición de La Informacion Catastral FDocumento71 páginasGuía para La Edición de La Informacion Catastral FKelly Monteza HerreraAún no hay calificaciones
- Ejemplos 20 Aplicacion de La DerivadaDocumento19 páginasEjemplos 20 Aplicacion de La DerivadaEstuardo AM100% (1)
- SatelitesDocumento45 páginasSatelitesJoel Fernando Rivas GarciaAún no hay calificaciones
- Máximos y MínimosDocumento6 páginasMáximos y MínimosMiguel ViteAún no hay calificaciones
- Jonathan Act3Documento10 páginasJonathan Act3Jonathan GeexboxAún no hay calificaciones
- Bases de Datos SQL - NoSQLDocumento7 páginasBases de Datos SQL - NoSQLRodrigoAún no hay calificaciones
- Plan de Negocios de Una Granja EducativaDocumento96 páginasPlan de Negocios de Una Granja EducativaHAS2010Aún no hay calificaciones
- Operating - Instructions Spanish Rev 3 May 6 2005 SpanishDocumento112 páginasOperating - Instructions Spanish Rev 3 May 6 2005 SpanishOmar AvilezAún no hay calificaciones
- Apuntes Todo Parte 2 Ejercicio Let ofDocumento39 páginasApuntes Todo Parte 2 Ejercicio Let ofKarina cervigniAún no hay calificaciones
- Aprendizaje Por RefuerzoDocumento3 páginasAprendizaje Por RefuerzoDario Xavier GomezAún no hay calificaciones
- Principios Basicos de Conmutacion y EnrutamientoDocumento232 páginasPrincipios Basicos de Conmutacion y EnrutamientoTemas del Talento en SistemasAún no hay calificaciones
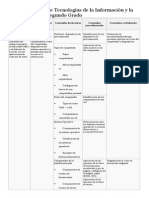
- Malla Curricular de Tecnologías de La Información y La Comunicación Segundo BasicoDocumento6 páginasMalla Curricular de Tecnologías de La Información y La Comunicación Segundo BasicoNico MendozaAún no hay calificaciones
- Arquitectura IntelDocumento21 páginasArquitectura IntelNatanias Isai Hernandez PastranaAún no hay calificaciones
- ENVI ManualDocumento13 páginasENVI ManualMaría José MerizaldeAún no hay calificaciones
- Implementación Con QLearning - Caso 1Documento13 páginasImplementación Con QLearning - Caso 1JOEL JHONATAN MACHUCA LLANOAún no hay calificaciones
- Semana 6 Julio Armando Landazuri CastroDocumento11 páginasSemana 6 Julio Armando Landazuri CastroJULIO ARMANDO LANDAZURI CASTROAún no hay calificaciones
- Problemas de OptimizaciónDocumento13 páginasProblemas de OptimizaciónMiguel Angel Huayaney MillaAún no hay calificaciones
- Actividad 7, Informe AntiderivadasDocumento11 páginasActividad 7, Informe AntiderivadasMarisol TORRES ANACONAAún no hay calificaciones
- Problema Del Surtido de Un Minorista.Documento11 páginasProblema Del Surtido de Un Minorista.Felipe RozasAún no hay calificaciones
- Import PulpDocumento12 páginasImport PulpivetteAún no hay calificaciones
- Ejemplos Estructuras Secuenciales - SnapDocumento5 páginasEjemplos Estructuras Secuenciales - SnapManuel GeronimoAún no hay calificaciones
- TP 5 - Pensamiento Probabilístico (Tarea) - PythonDocumento1 páginaTP 5 - Pensamiento Probabilístico (Tarea) - PythonEmiliano IparraguirreAún no hay calificaciones
- Analisis de Una Funcion de Ingresos Totales PDFDocumento5 páginasAnalisis de Una Funcion de Ingresos Totales PDFPedro Juan Cavadia Ibañez PJAún no hay calificaciones
- 2-Interés Compuesto Guía (Ej. 7, 8,10 A 16)Documento11 páginas2-Interés Compuesto Guía (Ej. 7, 8,10 A 16)Martina SánchezAún no hay calificaciones
- Estrategias de Evaluación PerezosaDocumento11 páginasEstrategias de Evaluación PerezosaAngelica Marlen GonzalezAún no hay calificaciones
- Problema 8 tp1 Mate 3Documento2 páginasProblema 8 tp1 Mate 3Fiore MagnoniAún no hay calificaciones
- Explicacion ProgramasimplexDocumento9 páginasExplicacion ProgramasimplexHilton CalderonAún no hay calificaciones
- 2019-1 Semana 11 - Diseño e Implementacion de AlgoritmosDocumento32 páginas2019-1 Semana 11 - Diseño e Implementacion de AlgoritmosSebastián JaramilloAún no hay calificaciones
- Teorema Fundamental Del Cálculo de Las IntegralesDocumento5 páginasTeorema Fundamental Del Cálculo de Las IntegralesScarlet RezabalaAún no hay calificaciones
- Proyecto de Mate Primera DerivadaDocumento7 páginasProyecto de Mate Primera DerivadaAlejandro AyalaAún no hay calificaciones
- Estructura Ciclo WhileDocumento10 páginasEstructura Ciclo WhilepasantedemicrobiologAún no hay calificaciones
- Dokumen - Tips Estadistica Con Python IDocumento14 páginasDokumen - Tips Estadistica Con Python IJohanna QuinteroAún no hay calificaciones
- Actividades SCRATCHDocumento7 páginasActividades SCRATCHbojabo7380Aún no hay calificaciones
- Ciclos en Borland CDocumento5 páginasCiclos en Borland CDIEGO259231Aún no hay calificaciones
- Evidencias Unidad II. Investigacion de OperacionesDocumento53 páginasEvidencias Unidad II. Investigacion de OperacionesEfra LarAún no hay calificaciones
- Universidad Autónoma Del Estado de Méxic100Documento5 páginasUniversidad Autónoma Del Estado de Méxic100Ricardo RojasAún no hay calificaciones
- 01 IntroduccionDocumento31 páginas01 IntroduccionMatiasEduardoOlivaresZamoraAún no hay calificaciones
- Optimización - Clase2 - 2023Documento19 páginasOptimización - Clase2 - 2023Javiera Soledad Lopez MuñozAún no hay calificaciones
- Lectura - Variacion de FuncionesDocumento5 páginasLectura - Variacion de FuncionesClara Pérez GómezAún no hay calificaciones
- Módulo de La Unidad 3.MATEMATICAS IIDocumento7 páginasMódulo de La Unidad 3.MATEMATICAS IIAngiely AltamirandaAún no hay calificaciones
- A04 - Ejercicio Desarrollado - Información AsimétricaDocumento8 páginasA04 - Ejercicio Desarrollado - Información AsimétricaYuri David FernándezAún no hay calificaciones
- P07 Mas Listas - 1Documento5 páginasP07 Mas Listas - 1sol belinkyAún no hay calificaciones
- Variables EconométricasDocumento3 páginasVariables Econométricasjuan RangelAún no hay calificaciones
- Fundamentos de OptimizacionDocumento9 páginasFundamentos de OptimizacionSantiago Maldonado De SantiagoAún no hay calificaciones
- 7.sentencias RepetitivasDocumento27 páginas7.sentencias RepetitivasSantiago ForeroAún no hay calificaciones
- Cómo Se Determinan Los Valores Máximos y Mínimos de Una Función CuadráticaDocumento2 páginasCómo Se Determinan Los Valores Máximos y Mínimos de Una Función CuadráticaYrma Marrufo RegaladoAún no hay calificaciones
- Apuntes para Correr El Programa en SCILABDocumento9 páginasApuntes para Correr El Programa en SCILABJavier Vargas DiazAún no hay calificaciones
- Aplicacion de La Programacion No LinealDocumento5 páginasAplicacion de La Programacion No LinealemerAún no hay calificaciones
- Organizacion Industrial - Teoria de La Empresa (Solucionario) PDFDocumento6 páginasOrganizacion Industrial - Teoria de La Empresa (Solucionario) PDFRAMOS CORREA PAOLA GERALDINEAún no hay calificaciones
- Teorema Fundamental Del Cálculo de Las IntegralesDocumento5 páginasTeorema Fundamental Del Cálculo de Las IntegralesScarlet RezabalaAún no hay calificaciones
- Ejercicios Segundo Parcial Parte1 Estructuras ControlDocumento5 páginasEjercicios Segundo Parcial Parte1 Estructuras ControlAndres GAún no hay calificaciones
- Actividad de Enseñanza 3Documento35 páginasActividad de Enseñanza 3Arnoldo De Jesus Martinez PerezAún no hay calificaciones
- Algoritmos Unidad 2.2Documento10 páginasAlgoritmos Unidad 2.2An Sofia MaflaAún no hay calificaciones
- 04 Elementos y Est Decision 8477 NewDocumento57 páginas04 Elementos y Est Decision 8477 NewEDGAR VINICIO BUSTAMANTE MONCAYOAún no hay calificaciones
- TAREA 3 OptimizaciónDocumento11 páginasTAREA 3 OptimizaciónLaura Rodriguez CoronaAún no hay calificaciones
- Preguntas Generadoras 2 TutoriaDocumento4 páginasPreguntas Generadoras 2 TutoriaJhon Steven Valencia GuzmanAún no hay calificaciones
- Tarea Academica 2 - Programacion Lineal-Miluska JacintoDocumento14 páginasTarea Academica 2 - Programacion Lineal-Miluska Jacintoluis CampodonicoAún no hay calificaciones
- Programacion GobstonesDocumento6 páginasProgramacion GobstonesBrisa DidoneAún no hay calificaciones
- Diagrama de Flujo CMMDocumento18 páginasDiagrama de Flujo CMMJonathan GabrielAún no hay calificaciones
- Action Script 3.0 - 2Documento4 páginasAction Script 3.0 - 2Moisés EnriqueAún no hay calificaciones
- Programacion PracticasDocumento17 páginasProgramacion Practicasjorge alberto sciandra treviñoAún no hay calificaciones
- CalculoDocumento23 páginasCalculoXavier CoriaAún no hay calificaciones
- Unidad 4 - Aplicaciones de Las DerivadasDocumento13 páginasUnidad 4 - Aplicaciones de Las DerivadasTiendita AmigurumiAún no hay calificaciones
- Practica 2 de Introduccion A La Inteligencia Artificial SimbolicaDocumento8 páginasPractica 2 de Introduccion A La Inteligencia Artificial SimbolicaMarcos CraveroAún no hay calificaciones
- Lab. Met. Numericos - Lab 3 (Eliminación de Gauss)Documento8 páginasLab. Met. Numericos - Lab 3 (Eliminación de Gauss)Armando Rodriguez JimenezAún no hay calificaciones
- Árbol de DecisiónDocumento18 páginasÁrbol de DecisiónglendyscarolinaAún no hay calificaciones
- Cerrajeros de MadridDocumento17 páginasCerrajeros de Madridweylad56mfAún no hay calificaciones
- Conclusiones, Recomendaciones, EtcDocumento6 páginasConclusiones, Recomendaciones, EtcmanuelhpAún no hay calificaciones
- Tintas Solvente 1000ml - Baja CalidadDocumento3 páginasTintas Solvente 1000ml - Baja CalidadMakarthy gpAún no hay calificaciones
- Moto TronDocumento7 páginasMoto TronWalter Conde AranaAún no hay calificaciones
- Instructivo Entregables de Capacitación para EeccDocumento5 páginasInstructivo Entregables de Capacitación para EeccEl Truji BackAún no hay calificaciones
- Los Circuitos DigitalesDocumento37 páginasLos Circuitos DigitalesRubén Chávez GonzálezAún no hay calificaciones
- Inteligencia ArtificialDocumento2 páginasInteligencia ArtificialJamesAún no hay calificaciones
- Siigo Manual 8.1Documento12 páginasSiigo Manual 8.1adgem05Aún no hay calificaciones
- Cuestionarios Exploracion DiagnosticaDocumento4 páginasCuestionarios Exploracion DiagnosticaJohan BorjaAún no hay calificaciones
- Guía - Movimiento ParabólicoDocumento6 páginasGuía - Movimiento ParabólicoTRANSFRICOLOPERACIONES SAS0% (1)
- EsquemasObjetos Oracle PDFDocumento37 páginasEsquemasObjetos Oracle PDFtatoferAún no hay calificaciones
- Antologia Informatica 1 2017Documento104 páginasAntologia Informatica 1 2017Joel SantiagoAún no hay calificaciones
- Maquetación de Textos y Edición de ImágenesDocumento10 páginasMaquetación de Textos y Edición de ImágenesazcatlAún no hay calificaciones
- 2014-01 Examen - Ordinario 24-Enero-2014Documento3 páginas2014-01 Examen - Ordinario 24-Enero-2014Juan José Franco GuerraAún no hay calificaciones
- Como Buscar Palabras Claves para Tu NichoDocumento3 páginasComo Buscar Palabras Claves para Tu NichoAnnyAún no hay calificaciones
- Site - Survey - Etx - 2i - 10G - Puerto - CabezaDocumento8 páginasSite - Survey - Etx - 2i - 10G - Puerto - CabezaJose RobeloAún no hay calificaciones
- Examen Resuelto Selectividad Matemáticas II ULPGCDocumento8 páginasExamen Resuelto Selectividad Matemáticas II ULPGCAdrian Cardona CandilAún no hay calificaciones
- Distribución de FuncionesDocumento3 páginasDistribución de FuncionesPablo RamosAún no hay calificaciones
- FISICA 2 Presentacion Power Point Sandra Rodrigues FDocumento65 páginasFISICA 2 Presentacion Power Point Sandra Rodrigues Fsandra rodriguesAún no hay calificaciones
- Uber Portier B.V. Contrato de Servicios Tecnologicos July 16, 2018Documento20 páginasUber Portier B.V. Contrato de Servicios Tecnologicos July 16, 2018Oliver YoshimarAún no hay calificaciones