También podría gustarte
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- Paso4 - Grupo36 - MicroprocesadoresDocumento18 páginasPaso4 - Grupo36 - MicroprocesadoresEdwin Jimenez100% (1)
- Robot Velocista Informe FinalDocumento15 páginasRobot Velocista Informe FinalDanish PalaciosAún no hay calificaciones
- Diseño Con Sensores y ActuadoresDocumento7 páginasDiseño Con Sensores y ActuadoresGadiel Armijos VAún no hay calificaciones
- Reporte Seguidor de LineaDocumento16 páginasReporte Seguidor de LineaJaime LMAún no hay calificaciones
- Robot Sigue Líneas Con Arduino - CastillowikiDocumento17 páginasRobot Sigue Líneas Con Arduino - Castillowikigeloandima1Aún no hay calificaciones
- Informe VelocistaDocumento13 páginasInforme VelocistaViera Navarro EinerAún no hay calificaciones
- Arduino TecnoDocumento11 páginasArduino Tecnoroberto firulais gonzalesAún no hay calificaciones
- Robot SumoDocumento10 páginasRobot Sumojose.cerrograndeAún no hay calificaciones
- PRACTICA 10 - Sistemas ElectronicosDocumento9 páginasPRACTICA 10 - Sistemas ElectronicosJohn SmithAún no hay calificaciones
- Carrito Seguidor de LineaDocumento22 páginasCarrito Seguidor de LineaAlejandro RodriguezAún no hay calificaciones
- Sistema de Control - (Carrito Seguidor de Linea)Documento16 páginasSistema de Control - (Carrito Seguidor de Linea)Ronaldo MendietaAún no hay calificaciones
- Guía - Líneas de Conexión de SensoresDocumento6 páginasGuía - Líneas de Conexión de Sensoresabraham renteriaAún no hay calificaciones
- Robot Evita Obstaculos.Documento12 páginasRobot Evita Obstaculos.Berenice SunemAún no hay calificaciones
- Practica 13 Report eDocumento13 páginasPractica 13 Report eAlbert GeorgeAún no hay calificaciones
- SE - Lab02 - Sensor Tipo Interruptor y EmisorDocumento14 páginasSE - Lab02 - Sensor Tipo Interruptor y EmisorWalter Raul Valentin AlvarezAún no hay calificaciones
- Carrito Con Acelerometro y Problema de AngulosDocumento12 páginasCarrito Con Acelerometro y Problema de AngulosSheryl YamileAún no hay calificaciones
- Informe Encoder Optico 1Documento8 páginasInforme Encoder Optico 1Gustavo QuicaliquinAún no hay calificaciones
- Reporte Sumo RobotDocumento17 páginasReporte Sumo RobotBrenda EstrellaAún no hay calificaciones
- Bitácora RobóticaDocumento7 páginasBitácora RobóticaAbel CastellanosAún no hay calificaciones
- Robot Evita Obstaculos NOVIEMBREDocumento13 páginasRobot Evita Obstaculos NOVIEMBREBerenice SunemAún no hay calificaciones
- Paso 3Documento11 páginasPaso 3Jimmy francoAún no hay calificaciones
- Telemetria Fase 3 Componente PracticoDocumento15 páginasTelemetria Fase 3 Componente Practicoleosignare100% (1)
- Seguidor de LineaDocumento15 páginasSeguidor de LineaNicole AlemánAún no hay calificaciones
- Practica PDFDocumento14 páginasPractica PDFRonald AlcivarAún no hay calificaciones
- Practica 3Documento29 páginasPractica 3JulioAún no hay calificaciones
- Realizacion de Un FrecuencimetroDocumento10 páginasRealizacion de Un FrecuencimetroJesus FelixAún no hay calificaciones
- Programación y Aplicación de Sensor UltrasónicoDocumento8 páginasProgramación y Aplicación de Sensor UltrasónicoWilly Luque BautistaAún no hay calificaciones
- Funcionamiento y Operacion Del Osciloscopio OTCDocumento7 páginasFuncionamiento y Operacion Del Osciloscopio OTCdamian freireAún no hay calificaciones
- Detector Pico Voltaje FullDocumento11 páginasDetector Pico Voltaje Fullosman guillermo arias castroAún no hay calificaciones
- Ensayo Construccion de Un Robot MovilDocumento9 páginasEnsayo Construccion de Un Robot MovilAndre LoeraAún no hay calificaciones
- INFORME GENERAL Del CircuitoDocumento8 páginasINFORME GENERAL Del CircuitoROMINA AUXILIADORA VARGAS GARCIAAún no hay calificaciones
- Parte 4-5Documento17 páginasParte 4-5Gustavo OrtizAún no hay calificaciones
- Proyecto Integrador - ElectrónicaDocumento18 páginasProyecto Integrador - Electrónicajoel soledispaAún no hay calificaciones
- Dmpa TreceDocumento11 páginasDmpa TreceCRIS ERIK ARISTE MANRIQUEAún no hay calificaciones
- Tarea Final Segundo Parcial-AriasDocumento13 páginasTarea Final Segundo Parcial-AriasStalin AriasAún no hay calificaciones
- Proyecto Carro UltrasonicoDocumento8 páginasProyecto Carro UltrasonicoRoger SarangoAún no hay calificaciones
- Práctica 5 Manejo de Multímetro, Osciloscopio y Scanner AutomotrizDocumento8 páginasPráctica 5 Manejo de Multímetro, Osciloscopio y Scanner AutomotrizPatrick Pastaz50% (2)
- Informe InnovaciónDocumento13 páginasInforme InnovaciónHan StAún no hay calificaciones
- Practica Seguidor de LineaDocumento11 páginasPractica Seguidor de LineaBril LopezAún no hay calificaciones
- Informe Seguidor de LineaDocumento12 páginasInforme Seguidor de LineaVinicio TenorioAún no hay calificaciones
- Reporte Sumo RobotDocumento17 páginasReporte Sumo RobotNahum olaf Soto GodinezAún no hay calificaciones
- Protocolo Actividad FinalDocumento13 páginasProtocolo Actividad Finaljamilvlez68Aún no hay calificaciones
- Cinta Transportadora ArduinoDocumento35 páginasCinta Transportadora ArduinoGonzalo Lenarduzzi100% (2)
- Carro Seguidor de LineaDocumento9 páginasCarro Seguidor de LineaCharly ArizmendiAún no hay calificaciones
- Informe Laboratorio FINALDocumento10 páginasInforme Laboratorio FINALMiguel GuarínAún no hay calificaciones
- Taller de Programacion RobotinoDocumento20 páginasTaller de Programacion RobotinoLuz FloresAún no hay calificaciones
- Hsi Inf 3 Proyecto IotDocumento22 páginasHsi Inf 3 Proyecto IotEIEEAún no hay calificaciones
- Informe CKP CMP KsDocumento13 páginasInforme CKP CMP KsOrlando Martínez100% (3)
- Informe Motor de Induccion Parte 1Documento19 páginasInforme Motor de Induccion Parte 1Cristian MolinaAún no hay calificaciones
- Informe - Vehículo Explorador RS 2017Documento92 páginasInforme - Vehículo Explorador RS 2017emanuelquispe777Aún no hay calificaciones
- Lab08 ComunicacionSerial PIC18F4550-1Documento28 páginasLab08 ComunicacionSerial PIC18F4550-1Marco Antonio ClaresAún no hay calificaciones
- Brazo RoboticoDocumento20 páginasBrazo RoboticoGianmarco Idrugo GutierrezAún no hay calificaciones
- Semaforo y CodigosDocumento6 páginasSemaforo y CodigosJenny LauraAún no hay calificaciones
- Reporte Seguidor de LineaDocumento11 páginasReporte Seguidor de Lineabryan jaret vargas gomezzAún no hay calificaciones
- CrocodileDocumento5 páginasCrocodileJuank SimbañaAún no hay calificaciones
- Informe Diagnostico OsciloscopioDocumento12 páginasInforme Diagnostico OsciloscopioDavid VillamarinAún no hay calificaciones
- Practica 19 Ultrasonico JmheDocumento9 páginasPractica 19 Ultrasonico JmheHugo GimenzAún no hay calificaciones
- Reparación de instalaciones automatizadas. ELEE0109De EverandReparación de instalaciones automatizadas. ELEE0109Aún no hay calificaciones
- 6 La Lingüística Como CienciaDocumento11 páginas6 La Lingüística Como Ciencianani 711Aún no hay calificaciones
- DiaclasasDocumento80 páginasDiaclasasexaguamhAún no hay calificaciones
- Unidad 4 TorsionDocumento11 páginasUnidad 4 TorsionOkaf CrisantAún no hay calificaciones
- Avance Obras Canal Del DiqueDocumento30 páginasAvance Obras Canal Del DiqueJuan Carlos Rodriguez MuñozAún no hay calificaciones
- 07 - Matins - Bourdieu, P. & Christin, R. (2015) - La Construcción Del Mercado.Documento44 páginas07 - Matins - Bourdieu, P. & Christin, R. (2015) - La Construcción Del Mercado.jgdws89jb4Aún no hay calificaciones
- DPCC 2doDocumento51 páginasDPCC 2doLENIN VEGA100% (1)
- Practica N°14 Subgrupo eDocumento12 páginasPractica N°14 Subgrupo ehaquilesAún no hay calificaciones
- Informe Laboratorio Grupo 13 PCNDocumento9 páginasInforme Laboratorio Grupo 13 PCNGabriel Ruz QuezadaAún no hay calificaciones
- Alimentación en PoligástricosDocumento17 páginasAlimentación en Poligástricosppeettiitt69% (16)
- Ficha de Evaluación de EFSRT 2023Documento1 páginaFicha de Evaluación de EFSRT 2023Cristopher GonzalesAún no hay calificaciones
- 2592 5Documento3 páginas2592 5Elizabeth Jiménez0% (1)
- TÓP AVANZ DE LA FÍSICA COMPUTACIONAL-2020-A-Jorge QuispeDocumento6 páginasTÓP AVANZ DE LA FÍSICA COMPUTACIONAL-2020-A-Jorge QuispeAtilano jose Cubas aranaAún no hay calificaciones
- Historia de La IngenieríaDocumento21 páginasHistoria de La IngenieríaDinastíaAún no hay calificaciones
- Programa Global de Recuperación Del Deportista de Elite Tras Fractura Parcial de Acetábulo de CaderaDocumento11 páginasPrograma Global de Recuperación Del Deportista de Elite Tras Fractura Parcial de Acetábulo de CaderaTatiana SánchezAún no hay calificaciones
- Inf. Mina SuspiroDocumento14 páginasInf. Mina SuspiroKarina Amaya GutierrezAún no hay calificaciones
- Trabajo Colaborativo Costos y PresupuestosDocumento11 páginasTrabajo Colaborativo Costos y Presupuestosjohn fredy monsalveAún no hay calificaciones
- Proyecto Final InformaticaDocumento14 páginasProyecto Final InformaticaAguirre AndrezAún no hay calificaciones
- Evolución de La ContabilidadDocumento16 páginasEvolución de La ContabilidadMaria Isabel Huillca SalgueroAún no hay calificaciones
- NAED NAED-310 FormatoalumnotrabajofinalDocumento17 páginasNAED NAED-310 Formatoalumnotrabajofinalrosa boza taczaAún no hay calificaciones
- P4 VictoriaOsorioELsyAiledDocumento6 páginasP4 VictoriaOsorioELsyAiledELSY AILED VICTORIA OSORIOAún no hay calificaciones
- Perfil Longitudinal Del Canal - Plano Planta y Perfil A1Documento1 páginaPerfil Longitudinal Del Canal - Plano Planta y Perfil A1Alan Ticona Sears100% (1)
- Botiquin de EmergenciaDocumento9 páginasBotiquin de EmergenciaFERNEL96Aún no hay calificaciones
- Producto Académico 02 - Simulacro de EntrevistaDocumento2 páginasProducto Académico 02 - Simulacro de EntrevistaJOEL ANTONIO AVILA TORRESAún no hay calificaciones
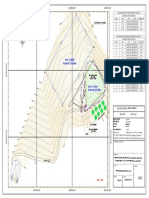
- Plano BotaderoDocumento1 páginaPlano BotaderoRoger ReyesAún no hay calificaciones
- ENFERMERIADocumento1 páginaENFERMERIAFernandaAún no hay calificaciones
- Rubiorico Gloria M03S2Al4Documento3 páginasRubiorico Gloria M03S2Al4Gloria De VázquezAún no hay calificaciones
- Malla Curricular Ug Ingenieria Electronica 2019-1-1553203826Documento1 páginaMalla Curricular Ug Ingenieria Electronica 2019-1-1553203826Gerson Castillo EsparzaAún no hay calificaciones
- Brochure Arquitectura Valledupar Areandina 2022Documento7 páginasBrochure Arquitectura Valledupar Areandina 2022kary readerAún no hay calificaciones
- Ciencia Política Una Introducción-Capítulo 4 (Josep M. Vallés)Documento14 páginasCiencia Política Una Introducción-Capítulo 4 (Josep M. Vallés)Anonymous 1BAUj0hAún no hay calificaciones
- La Pedagogía Como CienciaDocumento2 páginasLa Pedagogía Como CienciaelisaAún no hay calificaciones