También podría gustarte
- Administración de procesos: estados, BCP y planificaciónDocumento17 páginasAdministración de procesos: estados, BCP y planificaciónjamsalazarAún no hay calificaciones
- Unidad 2 Administracion de Procesos y Del ProcesadorDocumento13 páginasUnidad 2 Administracion de Procesos y Del Procesadorjose antonio gonzalezAún no hay calificaciones
- Capitulo 3Documento30 páginasCapitulo 3Arthuro EscuderoAún no hay calificaciones
- Proceso.: ¿Qué Es Un Proceso?Documento3 páginasProceso.: ¿Qué Es Un Proceso?jose mayAún no hay calificaciones
- Practica de ProcesoDocumento6 páginasPractica de ProcesoWanda GuerreroAún no hay calificaciones
- Administracion de Procesos y Del ProcesadorDocumento10 páginasAdministracion de Procesos y Del ProcesadorAleks FloresAún no hay calificaciones
- Resumen Sistema OperativoDocumento20 páginasResumen Sistema OperativoTatti TatiAún no hay calificaciones
- Administración de procesos en SODocumento9 páginasAdministración de procesos en SODavid Paredes CapetilloAún no hay calificaciones
- Unidad 2Documento13 páginasUnidad 2arisbel98Aún no hay calificaciones
- Unidad 2 Aso ResumenDocumento5 páginasUnidad 2 Aso ResumenFacundo SuarezAún no hay calificaciones
- Descripción y Aplicación de Procesos en Sistemas Operativo1Documento11 páginasDescripción y Aplicación de Procesos en Sistemas Operativo1Jose Alejandro Carrero SanchezAún no hay calificaciones
- Procesos y Administración Del ProcesadorVer2-1Documento13 páginasProcesos y Administración Del ProcesadorVer2-1Onaldo José Quintana WuizeAún no hay calificaciones
- UNIDAD 2 Administración de Procesos y Del ProcesadorDocumento6 páginasUNIDAD 2 Administración de Procesos y Del ProcesadorMiguel Jose Gonzalez BeaurregardAún no hay calificaciones
- Resumen UNIDAD VIIIDocumento34 páginasResumen UNIDAD VIIIJesus CastleAún no hay calificaciones
- Funciones Del Sistema OperativoDocumento8 páginasFunciones Del Sistema OperativoCristhian Sanchez PalominoAún no hay calificaciones
- Resumen CAPÍTULO III CONCEPTOS DE PROCESOSDocumento6 páginasResumen CAPÍTULO III CONCEPTOS DE PROCESOSJohnemil A. Feliz CuevasAún no hay calificaciones
- Unidad IIDocumento10 páginasUnidad IIAngelina Salgado LeonAún no hay calificaciones
- Gestión de Procesos y Sincronización de Los ProcesosDocumento6 páginasGestión de Procesos y Sincronización de Los ProcesosEnyer MedinaAún no hay calificaciones
- Multi ProcesoDocumento10 páginasMulti ProcesoEDuu Scénariste-RastoneAún no hay calificaciones
- Planificacion de ProcesosDocumento13 páginasPlanificacion de ProcesosLuis SandovalAún no hay calificaciones
- Sistemas Operativos - Ingenieria InformaticaDocumento62 páginasSistemas Operativos - Ingenieria InformaticaSantiago Cerfoglio0% (1)
- Proceso, Hilos, Planificación de Procesos.Documento8 páginasProceso, Hilos, Planificación de Procesos.Patrick Ricardo ChacónAún no hay calificaciones
- Trabajo Informatica 170122Documento3 páginasTrabajo Informatica 170122Luis JavierAún no hay calificaciones
- Los Procesos Del Sistema Operativo (Trabajo Random)Documento12 páginasLos Procesos Del Sistema Operativo (Trabajo Random)Shiroe HellscytheAún no hay calificaciones
- Métodos de Un Proceso en Un Sistema OperativoDocumento21 páginasMétodos de Un Proceso en Un Sistema OperativoBelkys GonzalezAún no hay calificaciones
- Unidad 2 SoDocumento31 páginasUnidad 2 SoRYZEN RAún no hay calificaciones
- Preguntas Examen Sistemas OperativosDocumento18 páginasPreguntas Examen Sistemas OperativosEzequiel Jardim100% (1)
- Lectura 2 - Procesos e Hilos PDFDocumento45 páginasLectura 2 - Procesos e Hilos PDFCharly DominguezAún no hay calificaciones
- Tarea Unidad IIDocumento13 páginasTarea Unidad IIBrandon Torres IriarteAún no hay calificaciones
- RESUMEN UNIDAD 2 Sistemas Operativos NuevoDocumento16 páginasRESUMEN UNIDAD 2 Sistemas Operativos NuevoLopez OlgaAún no hay calificaciones
- L5 Definición y Gestión de ProyectosDocumento7 páginasL5 Definición y Gestión de Proyectosthemisabogadas mxAún no hay calificaciones
- Reporte Procesos en Un SODocumento6 páginasReporte Procesos en Un SOAlexis WhiteAún no hay calificaciones
- UNIDAD 2 Sistemas OperativosDocumento36 páginasUNIDAD 2 Sistemas OperativosCarlos Gonzalez0% (1)
- Tema 1.2 Abril Mejia Taller Sistemas OperativosDocumento21 páginasTema 1.2 Abril Mejia Taller Sistemas OperativosApril MejiaAún no hay calificaciones
- Proceso: definición, estados y transicionesDocumento10 páginasProceso: definición, estados y transicioneseduand123Aún no hay calificaciones
- Gestión de procesos en sistemas operativosDocumento5 páginasGestión de procesos en sistemas operativosJuanjoAún no hay calificaciones
- 2.1. Concepto de Proceso 2.1. Concepto de ProcesoDocumento6 páginas2.1. Concepto de Proceso 2.1. Concepto de ProcesoGomez TonyAún no hay calificaciones
- Sistemas de OperacionesDocumento49 páginasSistemas de OperacionesLuis David Gonzalez DuertoAún no hay calificaciones
- Respuestas A Las Preguntas Del Libro de StallingsDocumento26 páginasRespuestas A Las Preguntas Del Libro de StallingsBruno StrasserAún no hay calificaciones
- El Nucleo y ProcesosDocumento4 páginasEl Nucleo y ProcesosAleanna SaraiAún no hay calificaciones
- Gestor de ProcesosDocumento7 páginasGestor de ProcesosDavidSCAún no hay calificaciones
- Segunda Unidad de Sistema OperativoDocumento12 páginasSegunda Unidad de Sistema OperativoRigo PerezAún no hay calificaciones
- Definicion de ProcesoDocumento3 páginasDefinicion de ProcesoRONY TORRES CHAVEZAún no hay calificaciones
- Trabajo Final - Programación Concurrente (C++)Documento11 páginasTrabajo Final - Programación Concurrente (C++)Luis Antonio Marquez CastroAún no hay calificaciones
- (Som) Tema 2 Sistemas OperativosDocumento27 páginas(Som) Tema 2 Sistemas OperativosAlejandro Picazo EspinosaAún no hay calificaciones
- Resumes S.ODocumento15 páginasResumes S.ODaniel OrtizAún no hay calificaciones
- 2.3 (Hilos y Hebras)Documento8 páginas2.3 (Hilos y Hebras)MOTH4Aún no hay calificaciones
- TCC - Sistemas OperativosDocumento11 páginasTCC - Sistemas OperativosIbsenJavierMosqueraVilladiegoAún no hay calificaciones
- Matriz de Evaluacion 3, Competencia 2, Avance de ProyectoDocumento8 páginasMatriz de Evaluacion 3, Competencia 2, Avance de ProyectoEquipo CuasimodosAún no hay calificaciones
- Unidad 2 Sistemas Operativos Procesos de Operación Del Sistemas OperativosDocumento14 páginasUnidad 2 Sistemas Operativos Procesos de Operación Del Sistemas OperativosPatricia Alejandra BlancoAún no hay calificaciones
- Evaluacion 5-Victor Caceres-Sistemas Operativos 2Documento9 páginasEvaluacion 5-Victor Caceres-Sistemas Operativos 2Victor CaceresAún no hay calificaciones
- Procesos y Gestion de ProcesosDocumento5 páginasProcesos y Gestion de ProcesosLuis AlvaradoAún no hay calificaciones
- AU - Actividad Autonoma 2.1 - Alvarado BaldeonDocumento8 páginasAU - Actividad Autonoma 2.1 - Alvarado BaldeonDENNIS ALEJANDRO SANCHEZ ALARCONAún no hay calificaciones
- Resumen Libro Sistemas Operativos Aspectos Internos y Principios de Diseño Capitulos TresDocumento7 páginasResumen Libro Sistemas Operativos Aspectos Internos y Principios de Diseño Capitulos TresSneiller LopezAún no hay calificaciones
- Procesos ExposicionDocumento13 páginasProcesos ExposicionOmiDark (Omidark)Aún no hay calificaciones
- Sistemas OperativosDocumento5 páginasSistemas Operativosviannys andradeAún no hay calificaciones
- Guia Gestion de ProcesosDocumento8 páginasGuia Gestion de ProcesosPatricia Alejandra BlancoAún no hay calificaciones
- 38 ProcesosDocumento3 páginas38 ProcesosJose LopezAún no hay calificaciones
- Gestión auxiliar de archivo en soporte convencional o informático. ADGG0408De EverandGestión auxiliar de archivo en soporte convencional o informático. ADGG0408Aún no hay calificaciones
- Desarrollo y optimización de componentes software para tareas administrativas de sistemas. IFCT0609De EverandDesarrollo y optimización de componentes software para tareas administrativas de sistemas. IFCT0609Aún no hay calificaciones
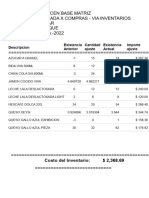
- Descripcion Existencia Anterior Existencia Actual Cantidad Ajuste Importe AjusteDocumento1 páginaDescripcion Existencia Anterior Existencia Actual Cantidad Ajuste Importe AjusteEnrique LópezAún no hay calificaciones
- U3 Base DatosDocumento2 páginasU3 Base DatosEnrique LópezAún no hay calificaciones
- Elaboracion MacetaDocumento11 páginasElaboracion MacetaEnrique LópezAún no hay calificaciones
- Lopez Enrique U2 Pract 1Documento1 páginaLopez Enrique U2 Pract 1Enrique LópezAún no hay calificaciones
- Electrotecnia, 10ma Edición - José GarcíaDocumento443 páginasElectrotecnia, 10ma Edición - José GarcíaErnestoKhun50% (2)
- Tarea 2 VHDLDocumento4 páginasTarea 2 VHDLCristian RoblesAún no hay calificaciones
- GUIA DE INFORMATICA GRADO 61 y 62Documento3 páginasGUIA DE INFORMATICA GRADO 61 y 62Wendy carolina CamargoAún no hay calificaciones
- Guino - Tablero para Su Arduino - 4 Pasos (Con Imágenes) - InstructablesDocumento13 páginasGuino - Tablero para Su Arduino - 4 Pasos (Con Imágenes) - InstructablesRoberto BooteAún no hay calificaciones
- Prepositions of Place PrimaryDocumento4 páginasPrepositions of Place Primaryloreto9ferrerasAún no hay calificaciones
- Evaluación de La Semana 4 - Dibujo Asistido Por ComputadoraDocumento3 páginasEvaluación de La Semana 4 - Dibujo Asistido Por ComputadoraLincoln RuizAún no hay calificaciones
- TDR Servicio de Monitoreo y Rastreo Vehicular A Traves de Gps InvitacionDocumento25 páginasTDR Servicio de Monitoreo y Rastreo Vehicular A Traves de Gps Invitacionoredroc12Aún no hay calificaciones
- Wuolah Free LA BIBLIA DE LOS SISTEMAS OPERATIVOSDocumento23 páginasWuolah Free LA BIBLIA DE LOS SISTEMAS OPERATIVOSadrianzgz10Aún no hay calificaciones
- Parejas Liberales Follando Monte en MadridDocumento2 páginasParejas Liberales Follando Monte en MadridEroticoAún no hay calificaciones
- Iciv 1201 EfDocumento5 páginasIciv 1201 Efchicho silva manriqueAún no hay calificaciones
- Arquitectura multiplexada Citroen C4 SedanDocumento35 páginasArquitectura multiplexada Citroen C4 Sedaneaherreram100% (1)
- Funciones LógicasDocumento14 páginasFunciones LógicasMIGUEL LEONAún no hay calificaciones
- METODOLOGIA 12articulo - Rev Tec Num 2Documento14 páginasMETODOLOGIA 12articulo - Rev Tec Num 2Martha Luisa Hernández GílAún no hay calificaciones
- Router Asus-S15565 RT-AC59U ManualDocumento100 páginasRouter Asus-S15565 RT-AC59U ManualmastaAún no hay calificaciones
- Planilla de Excel para El Calculo de Tir y VanDocumento21 páginasPlanilla de Excel para El Calculo de Tir y VanNildaLlanosCondoriAún no hay calificaciones
- Coeducavirus - Mujeres en La Historia PDFDocumento16 páginasCoeducavirus - Mujeres en La Historia PDFRamon MTAún no hay calificaciones
- Curp Held760129hvzrzv01Documento1 páginaCurp Held760129hvzrzv01yale21977Aún no hay calificaciones
- 5 Enrutamiento Estatico 3 RoutersDocumento22 páginas5 Enrutamiento Estatico 3 RoutersSebastian BernalAún no hay calificaciones
- Esquema Del InformeDocumento22 páginasEsquema Del InformeJonathan MarquinaAún no hay calificaciones
- Investigación - Nicolás Gaviria CerónDocumento16 páginasInvestigación - Nicolás Gaviria CerónNicolásAún no hay calificaciones
- TopologiaDocumento4 páginasTopologiaJose Antonio Robles PavónAún no hay calificaciones
- GEO-PST-016-I-52 Medición de Poligonal Con ET TS16 y TS60 Rev 01Documento39 páginasGEO-PST-016-I-52 Medición de Poligonal Con ET TS16 y TS60 Rev 01giulingoAún no hay calificaciones
- Carta Modelo Final WordDocumento2 páginasCarta Modelo Final Wordinformática basicaAún no hay calificaciones
- Anexo 1. Plantilla Tarea 1 - JOHAN SEBASTIAN HERNANDEZ ZAPATADocumento26 páginasAnexo 1. Plantilla Tarea 1 - JOHAN SEBASTIAN HERNANDEZ ZAPATALUIS PEÑAAún no hay calificaciones
- Excel Ejemplos FormatoDocumento8 páginasExcel Ejemplos FormatoPaula PortillaAún no hay calificaciones
- Cargo de Entrega de TabletsDocumento2 páginasCargo de Entrega de TabletsCésar LAún no hay calificaciones
- Trabajo Tema 05Documento7 páginasTrabajo Tema 05RONALDO NAVARRO ANYOSAAún no hay calificaciones
- Tema: Factorización de Expresiones AlgebraicasDocumento9 páginasTema: Factorización de Expresiones AlgebraicasASTRID CONTRERASAún no hay calificaciones
- Uvc005830 Ac1 SiDocumento6 páginasUvc005830 Ac1 SiRubi Ibarra RodriguezAún no hay calificaciones
- Kron CiscoDocumento6 páginasKron CiscoCharlotteAún no hay calificaciones
- Flyer Excel Avanzado 2018Documento2 páginasFlyer Excel Avanzado 2018Armando Yimes RoaAún no hay calificaciones