También podría gustarte
- Estructuras IsostaticasDocumento13 páginasEstructuras IsostaticasALEJANDRO ulisesAún no hay calificaciones
- Analisis EstructuralDocumento10 páginasAnalisis EstructuralAlejandro GonzalezAún no hay calificaciones
- Equiibrio de Cuerpos RigidosDocumento11 páginasEquiibrio de Cuerpos RigidosJhenny Callisaya BlancoAún no hay calificaciones
- Mecanica de Estructuras.Documento14 páginasMecanica de Estructuras.Jorge M AguilarAún no hay calificaciones
- Definición de ChapaDocumento9 páginasDefinición de Chapaeduim pachecoAún no hay calificaciones
- Equilibrio de Cuerpos RigidosDocumento5 páginasEquilibrio de Cuerpos RigidosAdrian Cuellar SampayoAún no hay calificaciones
- Cuerpo Rigido en Equilibrio TrabajoDocumento14 páginasCuerpo Rigido en Equilibrio TrabajoCristian López MarinAún no hay calificaciones
- Apuntes de Clases v2Documento51 páginasApuntes de Clases v2Rodrigo PeralesAún no hay calificaciones
- Estática Sin RozamientoDocumento5 páginasEstática Sin RozamientoAmIn20122Aún no hay calificaciones
- Equlibrio Cuerpos Vinculados 2013 1Documento60 páginasEqulibrio Cuerpos Vinculados 2013 1renedavidAún no hay calificaciones
- Grados de Libertad FinalDocumento16 páginasGrados de Libertad FinalSaussure Fer CcoriAún no hay calificaciones
- EstaticaDocumento4 páginasEstaticajuan carlos rubioAún no hay calificaciones
- Física 8 - Estatica - Sin - RozamientoDocumento5 páginasFísica 8 - Estatica - Sin - Rozamientosheldon bazingaAún no hay calificaciones
- Equilibrio de Un Cuerpo RígidoDocumento8 páginasEquilibrio de Un Cuerpo RígidoRodriguez AlbertoAún no hay calificaciones
- Resumen Capitulo 4Documento3 páginasResumen Capitulo 4api-254242928Aún no hay calificaciones
- Clasificacion Estatica de Las EstructurasDocumento14 páginasClasificacion Estatica de Las EstructurasJose Juarez Alquizar100% (1)
- Documento de Apoyo, Equilibrio y EstabilidadDocumento13 páginasDocumento de Apoyo, Equilibrio y Estabilidadsofia bedoya gallegoAún no hay calificaciones
- Diferencia Entre Estructuras Isostáticas e HiperestáticasDocumento10 páginasDiferencia Entre Estructuras Isostáticas e Hiperestáticasdiego ururi67% (3)
- Capitulo 4 ResumenDocumento13 páginasCapitulo 4 ResumenWilhelm Ritz Pardey RosalesAún no hay calificaciones
- Apuntes U3 EstaticaDocumento8 páginasApuntes U3 Estaticaivan hernandezAún no hay calificaciones
- Unidad 3 Cuerpos Rigidos en El EspacioDocumento5 páginasUnidad 3 Cuerpos Rigidos en El Espaciokevin ascensioAún no hay calificaciones
- Tipos de Apoyos y Cálculo de Reacciones - GeudyDocumento10 páginasTipos de Apoyos y Cálculo de Reacciones - GeudyAndres FernandezAún no hay calificaciones
- M1-4-Determinación de Los Grados de LibertadDocumento11 páginasM1-4-Determinación de Los Grados de Libertadmediciones ssmaAún no hay calificaciones
- Calculo Por El Metodo de Las FuerzasDocumento6 páginasCalculo Por El Metodo de Las FuerzasG-sus Albert Julca UlloaAún no hay calificaciones
- Equilibrio en PlanoDocumento22 páginasEquilibrio en PlanoIsabel Nancy Quispe RojasAún no hay calificaciones
- Sesión 11 - Clase PDFDocumento63 páginasSesión 11 - Clase PDFOMAR ROLANDO CORREA FELIPEAún no hay calificaciones
- 04 847473loxdiuojihDocumento36 páginas04 847473loxdiuojihAna Isabel Guerrero FloresAún no hay calificaciones
- EquilibrioDocumento25 páginasEquilibrioMartin Vargas SalazarAún no hay calificaciones
- 5.2 Estática de Cuerpos Rígidos 3DDocumento18 páginas5.2 Estática de Cuerpos Rígidos 3Dmarusya LunaAún no hay calificaciones
- Mecanismos - Biela - Manivela - Corredera PDFDocumento69 páginasMecanismos - Biela - Manivela - Corredera PDFMiguelAngelJauregui100% (1)
- Estructura BidimensionalDocumento17 páginasEstructura BidimensionalignacioAún no hay calificaciones
- Capitulo 4 Desarrollo de TemaDocumento12 páginasCapitulo 4 Desarrollo de TemaJosé JuárezAún no hay calificaciones
- Unidad 2. Análisis Del Cuerpo Rígido.Documento36 páginasUnidad 2. Análisis Del Cuerpo Rígido.José Omar Peréz60% (5)
- Dinamica Estructural 2023Documento128 páginasDinamica Estructural 2023frayver molinaAún no hay calificaciones
- Presentación 1Documento74 páginasPresentación 1Camilo A TabordaAún no hay calificaciones
- Teoría v1Documento4 páginasTeoría v1angie yurivilcaAún no hay calificaciones
- Resumen Unidad 02Documento19 páginasResumen Unidad 02JOSE JESUS MARTINEZ ACOSTAAún no hay calificaciones
- EquilibrioDocumento33 páginasEquilibrioLaura RamirezAún no hay calificaciones
- Apoyos y Reacciones 10 % II CorteDocumento9 páginasApoyos y Reacciones 10 % II CorteLuis OlnAún no hay calificaciones
- Equilibrio Del C.R. 2DDocumento38 páginasEquilibrio Del C.R. 2DFabian MaloAún no hay calificaciones
- Escuela de Ingeniería Mecánica: EstáticaDocumento18 páginasEscuela de Ingeniería Mecánica: EstáticaJOSTYN DANILO ESTUPIAN GONZALEZAún no hay calificaciones
- T5 - Equilibrio de Cuerpo RigidoDocumento14 páginasT5 - Equilibrio de Cuerpo RigidoSergio Emmanuel Arjona LopezAún no hay calificaciones
- 24001-14 Resistencia de Materiales - TeoríaDocumento44 páginas24001-14 Resistencia de Materiales - Teoríacharlespfdelima100% (1)
- SEGMENTAL2022 v0.2Documento40 páginasSEGMENTAL2022 v0.2Miqueas morosinAún no hay calificaciones
- TEMA 3 Equilibrio Del Cuerpo RígidoDocumento36 páginasTEMA 3 Equilibrio Del Cuerpo RígidoJahaziel KibAún no hay calificaciones
- Tipos de Soporte EstaticaDocumento6 páginasTipos de Soporte EstaticaVicente Manuel Ceballos PootAún no hay calificaciones
- Ejercicios Primer ParcialDocumento25 páginasEjercicios Primer ParcialJose MariscalAún no hay calificaciones
- Mecanismos Clase 5Documento20 páginasMecanismos Clase 5carlos fernando romero hortuaAún no hay calificaciones
- Reacciones y Equilibrio de Un Sólido Rígido en 3D Johnnattan LatorreDocumento18 páginasReacciones y Equilibrio de Un Sólido Rígido en 3D Johnnattan LatorreJohnnattan LatorreAún no hay calificaciones
- Armaduras, Bastidores y MaquinasDocumento40 páginasArmaduras, Bastidores y MaquinasJefry Paredes79% (14)
- Cap 3 Eq de Cuerpos RigidosDocumento21 páginasCap 3 Eq de Cuerpos RigidosCarlos AlfonsoAún no hay calificaciones
- Diagramas de Cuerpo LibreDocumento32 páginasDiagramas de Cuerpo LibreJorge PoumianAún no hay calificaciones
- 2ESTATICADocumento129 páginas2ESTATICAliriuxAún no hay calificaciones
- Tarea 2.1.-Equilibrio de Cuerpos Rígidos JORGE TOLEDODocumento14 páginasTarea 2.1.-Equilibrio de Cuerpos Rígidos JORGE TOLEDOJorge L Perez ToledoAún no hay calificaciones
- Trabajo de r1.1Documento28 páginasTrabajo de r1.1rodrigo paredesAún no hay calificaciones
- Equilibrio de La Particula en Ingenieria CivilDocumento3 páginasEquilibrio de La Particula en Ingenieria CivilEmmanuelRueda100% (1)
- Guía para el análisis y solución de problemas de resistencia de materialesDe EverandGuía para el análisis y solución de problemas de resistencia de materialesAún no hay calificaciones
- Escala Calificacion OPHI IIDocumento9 páginasEscala Calificacion OPHI IISilvia AfanadorAún no hay calificaciones
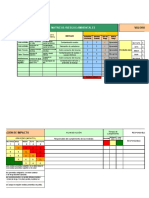
- MATRIZ de RIESGOS Ambientales EjemploDocumento3 páginasMATRIZ de RIESGOS Ambientales EjemploLiz M. Barahona ValladaresAún no hay calificaciones
- 2019 Adulto JovenDocumento8 páginas2019 Adulto Jovenangel leonAún no hay calificaciones
- (Template) La ComputadoraDocumento6 páginas(Template) La ComputadoraStephany Gissel RubioAún no hay calificaciones
- ExamenDocumento2 páginasExamenIsmael VelizAún no hay calificaciones
- Informe de Placa OrificioDocumento14 páginasInforme de Placa OrificioricardoAún no hay calificaciones
- TareaS05.Gutierrez Putpaña - Diego EstefanoDocumento1 páginaTareaS05.Gutierrez Putpaña - Diego EstefanoDiego EstefanoAún no hay calificaciones
- Ept - 4 - Carpeta de Recuperacion - 2021 - TeoriaDocumento24 páginasEpt - 4 - Carpeta de Recuperacion - 2021 - TeoriaBrenda SasariAún no hay calificaciones
- RT PCRDocumento4 páginasRT PCRMaria Del Mar FernándezAún no hay calificaciones
- Ejercicios L3Documento2 páginasEjercicios L3Rockruto 33Aún no hay calificaciones
- La Cuarta Dimension Del Objeto Una Perspectiva SocDocumento6 páginasLa Cuarta Dimension Del Objeto Una Perspectiva SocEsteban Gutierrez TrujilloAún no hay calificaciones
- Informe de Laboratorio N°1Documento6 páginasInforme de Laboratorio N°1Karen NathaliaAún no hay calificaciones
- Area de WernickeDocumento4 páginasArea de WernickeRosaAún no hay calificaciones
- Capacidades Fisicas Edad Escolar PDFDocumento59 páginasCapacidades Fisicas Edad Escolar PDFantonio almonteAún no hay calificaciones
- Telemetria Laser LaboratorioDocumento19 páginasTelemetria Laser LaboratorioJean GutierrezAún no hay calificaciones
- GCL 1.3 Contencion Fisica y Medidas de Prev de Ev Adv Asoc Version 3 Vig 2025Documento17 páginasGCL 1.3 Contencion Fisica y Medidas de Prev de Ev Adv Asoc Version 3 Vig 2025Nata OrtizAún no hay calificaciones
- Matriz de Responsabilidades y Autoridades Ambientales 250820Documento9 páginasMatriz de Responsabilidades y Autoridades Ambientales 250820cesar cardonaAún no hay calificaciones
- Sesión 2 GC Ecuaciones Diferenciales y Algebra Lineal PDFDocumento28 páginasSesión 2 GC Ecuaciones Diferenciales y Algebra Lineal PDFPaola Mena Alberca100% (1)
- Áreas Planas SumergidasDocumento8 páginasÁreas Planas SumergidasVILLANUEVA SANCHEZ PEDRO ALBERTOAún no hay calificaciones
- Identidades Trigonométricas Fundamentales IIDocumento3 páginasIdentidades Trigonométricas Fundamentales IIFremari M RiosAún no hay calificaciones
- Manual R1 2008 PDFDocumento108 páginasManual R1 2008 PDFFrancisco Javier Villahermosa ChavesAún no hay calificaciones
- Actividad 2-Cuadro ComparativoDocumento7 páginasActividad 2-Cuadro ComparativoLynda Hurtado LAún no hay calificaciones
- Hinrichsen Fuenzalida Rubilar PobleteDocumento28 páginasHinrichsen Fuenzalida Rubilar PobletekathiaAún no hay calificaciones
- 01 - Información de Mantenimiento Atego WDB, 9BMDocumento2 páginas01 - Información de Mantenimiento Atego WDB, 9BMAngelica Puebla Labarca100% (1)
- Vvaa - Clínicas Insurgentes (Percia)Documento138 páginasVvaa - Clínicas Insurgentes (Percia)Bianca IbarraAún no hay calificaciones
- Ejercicios Capitulo 6Documento18 páginasEjercicios Capitulo 6Paul JHAún no hay calificaciones
- 02 Nube Electronica PDFDocumento15 páginas02 Nube Electronica PDFJaime Obeso ValdezAún no hay calificaciones
- Semana 8 - Examen Final - Revisión de IntentosDocumento6 páginasSemana 8 - Examen Final - Revisión de IntentosLesly RojasAún no hay calificaciones
- Trabajo Final Orientacion VocacionalDocumento10 páginasTrabajo Final Orientacion VocacionalYenny Mendez BenítezAún no hay calificaciones
- 1Documento6 páginas1brenda ruizAún no hay calificaciones