También podría gustarte
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeDe EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeAún no hay calificaciones
- Notas AVR Parte1 PDFDocumento78 páginasNotas AVR Parte1 PDFJose Antonio Meza ChoquehuaytaAún no hay calificaciones
- Compilador C CCS y Simulador Proteus para Microcontroladores PICDe EverandCompilador C CCS y Simulador Proteus para Microcontroladores PICCalificación: 2.5 de 5 estrellas2.5/5 (5)
- Clases Primer Parcial MicrocontroladoresDocumento79 páginasClases Primer Parcial Microcontroladoresandrea CamachoAún no hay calificaciones
- UF0852 - Instalación y actualización de sistemas operativosDe EverandUF0852 - Instalación y actualización de sistemas operativosCalificación: 5 de 5 estrellas5/5 (1)
- Los MicrocontroladoresDocumento27 páginasLos MicrocontroladoresFabiana RodriguezAún no hay calificaciones
- Diferencia Entre La Arquitectura Von Neuma y HarvardDocumento12 páginasDiferencia Entre La Arquitectura Von Neuma y Harvardboni lunaAún no hay calificaciones
- Teoria Basica MCDocumento8 páginasTeoria Basica MCleo garzaAún no hay calificaciones
- Tipos de Arquitecturas y Evolucion Del CpuDocumento26 páginasTipos de Arquitecturas y Evolucion Del Cpuoso67% (3)
- 1.1 - Introducción A Los MicrocontroladoresDocumento15 páginas1.1 - Introducción A Los MicrocontroladoresWiliam CopacatiAún no hay calificaciones
- Arquitectura de Los MicrocontroladoresDocumento15 páginasArquitectura de Los MicrocontroladoresJoel RinconAún no hay calificaciones
- Microcontrolador vs. MicroprocesadorDocumento8 páginasMicrocontrolador vs. MicroprocesadorNahuel PiancaAún no hay calificaciones
- Microcontrolador. TeoríaDocumento38 páginasMicrocontrolador. TeoríaAnghel Moreno100% (1)
- Sesion 1Documento89 páginasSesion 1Jerry JamesAún no hay calificaciones
- Presentación 3Documento8 páginasPresentación 3Willy LlapacoAún no hay calificaciones
- Notas AVR Maestría Parte1Documento73 páginasNotas AVR Maestría Parte1Seminario InvestigaciónAún no hay calificaciones
- Microcontroladores Historia - Arquitectura AplicacionesDocumento89 páginasMicrocontroladores Historia - Arquitectura AplicacionesMaximiliano GiniAún no hay calificaciones
- CompPrincHarvMicroDocumento7 páginasCompPrincHarvMicropabloAún no hay calificaciones
- Qué Es Un MicroprocesadorDocumento4 páginasQué Es Un Microprocesadorfabian PazoAún no hay calificaciones
- Tema 3. Diseno de Filtros FirDocumento91 páginasTema 3. Diseno de Filtros FirJuan J. MendoAún no hay calificaciones
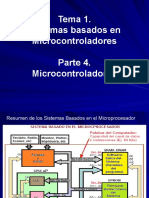
- Presentacion Tema 1. Parte 4. Sistemas Basados en El MicrocontroladorDocumento15 páginasPresentacion Tema 1. Parte 4. Sistemas Basados en El MicrocontroladorKevin RodriguezAún no hay calificaciones
- Arquitectura Del 68HC11 - EypdcDocumento23 páginasArquitectura Del 68HC11 - EypdcGunter BreakAún no hay calificaciones
- MICROCONTROLADORES Clase01Documento12 páginasMICROCONTROLADORES Clase01Janeth QuicoAún no hay calificaciones
- Apuntes MicrosDocumento20 páginasApuntes MicrosPita GuEsAún no hay calificaciones
- Fundamentos de microcontroladores en el IPNDocumento24 páginasFundamentos de microcontroladores en el IPNFernando PèrezAún no hay calificaciones
- Caracteristicas de Los PICDocumento8 páginasCaracteristicas de Los PICt_toyoAún no hay calificaciones
- Micro Pro Ces AdoresDocumento31 páginasMicro Pro Ces AdoresBrian ReilAún no hay calificaciones
- Microcontroladore InformeDocumento5 páginasMicrocontroladore InformeAlexandra calderon veraAún no hay calificaciones
- Examen ResueltoDocumento7 páginasExamen ResueltoDaniel Suarez Suarez100% (1)
- Microcontroladores y Microprocesadores DiferenciaDocumento5 páginasMicrocontroladores y Microprocesadores DiferenciaThomii RodriguezAún no hay calificaciones
- Microcontroladores Temperatura DS18B20Documento13 páginasMicrocontroladores Temperatura DS18B20Alex YagloaAún no hay calificaciones
- 1.1 MicrocontroladoresDocumento8 páginas1.1 MicrocontroladoresLuis Enrique Mosqueda RamirezAún no hay calificaciones
- Microcontroladores. Prof Danilo Rojas Chanto, Apoyo Examen FinalDocumento45 páginasMicrocontroladores. Prof Danilo Rojas Chanto, Apoyo Examen FinalAssasingAún no hay calificaciones
- Organización de microcontroladoresDocumento20 páginasOrganización de microcontroladoresJenny StevezAún no hay calificaciones
- Plantilla Obligatoria para Presentación Informes - PASO 2Documento9 páginasPlantilla Obligatoria para Presentación Informes - PASO 2dalicaroAún no hay calificaciones
- Microcontroladores - IntroduccionDocumento46 páginasMicrocontroladores - IntroduccionSimón RíosAún no hay calificaciones
- Introducción a microprocesadores y microcontroladores: diferencias y aplicacionesDocumento20 páginasIntroducción a microprocesadores y microcontroladores: diferencias y aplicacionesMartin HGAún no hay calificaciones
- MicrocontroladoresDocumento24 páginasMicrocontroladoresGeizel ToledoAún no hay calificaciones
- Curso básico de PIC 16F887Documento171 páginasCurso básico de PIC 16F887Ernesto NetoAún no hay calificaciones
- Modelo de Von NeumanDocumento4 páginasModelo de Von NeumanHerless FloresAún no hay calificaciones
- Guti Rami 5 IM2 P3Documento62 páginasGuti Rami 5 IM2 P3Gutierrez Ramirez Alana SofiaAún no hay calificaciones
- Diferencia Entre Microcontroladores y MicroprocesadorDocumento11 páginasDiferencia Entre Microcontroladores y MicroprocesadorCrisAún no hay calificaciones
- Programacion de MicrocontroladorDocumento18 páginasProgramacion de MicrocontroladorDeisy Gladys Vilchez Cieza100% (1)
- Unidad 4 MicrocontroladoresDocumento17 páginasUnidad 4 MicrocontroladoresAdrikk SparrowAún no hay calificaciones
- Arquitectura de microcontroladores 8 bitsDocumento7 páginasArquitectura de microcontroladores 8 bitsJaphet González BerronesAún no hay calificaciones
- Exposicion MicrocontroladoresDocumento45 páginasExposicion MicrocontroladoresAlberto DominguezAún no hay calificaciones
- MICROCONTROLADORESDocumento117 páginasMICROCONTROLADORESMaferBeristain100% (3)
- Sistemas Embebidos Basados en MicrocontroladoresDocumento7 páginasSistemas Embebidos Basados en MicrocontroladoresAntony Salcedo OrtizAún no hay calificaciones
- El PIC Es Un Controlador de Interfaz Periférico Por Sus Siglas en InglésDocumento33 páginasEl PIC Es Un Controlador de Interfaz Periférico Por Sus Siglas en InglésMaelo Borinqueño100% (2)
- Introducción A Los Sistemas ProgramablesDocumento7 páginasIntroducción A Los Sistemas Programablesevaob75Aún no hay calificaciones
- DiapositivasDocumento65 páginasDiapositivasRicardo Mosquera CanteroAún no hay calificaciones
- Up Tema 2 D5Documento45 páginasUp Tema 2 D5Carlos De La RosaAún no hay calificaciones
- Introduccion A Los Microcontroladores PDFDocumento17 páginasIntroduccion A Los Microcontroladores PDFMaximiliano GiniAún no hay calificaciones
- Arquitectura Del Computador 06Documento41 páginasArquitectura Del Computador 06renzo anicama masgoAún no hay calificaciones
- Laboratorio 10Documento10 páginasLaboratorio 10Rosina Garcia PilcomayoAún no hay calificaciones
- Microprocesadores y sus componentesDocumento8 páginasMicroprocesadores y sus componentesJhon JairoAún no hay calificaciones
- Tema 1 Parte 1 ACSODocumento37 páginasTema 1 Parte 1 ACSOSplit GamesAún no hay calificaciones
- Microprocesador PDFDocumento29 páginasMicroprocesador PDFANGEL RICARDO LICONA RODRIGUEZAún no hay calificaciones
- 06 Clase MicrocontroladorDocumento29 páginas06 Clase MicrocontroladorVlentina Gómez NuñezAún no hay calificaciones
- Arquitectura de Los MicrocontroladoresDocumento10 páginasArquitectura de Los MicrocontroladoresHector Hdez AguilarAún no hay calificaciones
- 2.1.-Programacion de PIC en Lenguaje CDocumento28 páginas2.1.-Programacion de PIC en Lenguaje CFranco OrtizAún no hay calificaciones
- Grabador Pikit3Documento4 páginasGrabador Pikit3Franco OrtizAún no hay calificaciones
- 3.1configuracion de Los Puertos de Entrada - Salida - 22Documento6 páginas3.1configuracion de Los Puertos de Entrada - Salida - 22Franco OrtizAún no hay calificaciones
- 2.2. - Sentencias de Control de Programa - 2022Documento13 páginas2.2. - Sentencias de Control de Programa - 2022Franco OrtizAún no hay calificaciones
- Revisión Cuadernos Informe FP EmpresaDocumento10 páginasRevisión Cuadernos Informe FP EmpresaFranco OrtizAún no hay calificaciones
- Seminario actualización 2023 psicología conductas éticas violencia escolar talento humanoDocumento1 páginaSeminario actualización 2023 psicología conductas éticas violencia escolar talento humanoFranco OrtizAún no hay calificaciones
- Matriz Del ProblemaDocumento1 páginaMatriz Del ProblemaFranco OrtizAún no hay calificaciones
- Actividad 01 Matemática QuintoDocumento3 páginasActividad 01 Matemática QuintoFranco OrtizAún no hay calificaciones