También podría gustarte
- Curso de Reprogramacion de CentralitasDocumento13 páginasCurso de Reprogramacion de CentralitasRomán Osvaldo Alemán GonzálezAún no hay calificaciones
- Curso de seguridad en amoladorasDocumento8 páginasCurso de seguridad en amoladorasJuan Carlos Salinas Perez0% (1)
- Seminario Multiplexado 3Documento46 páginasSeminario Multiplexado 3B Arturo GalindoAún no hay calificaciones
- Manual Uso RadioReset PionnerDocumento2 páginasManual Uso RadioReset PionnerScot Electronica (Scot electronica)Aún no hay calificaciones
- Tipos de trama 802.11: gestión, control, datosDocumento3 páginasTipos de trama 802.11: gestión, control, datosHarry OstaizaAún no hay calificaciones
- Resumen MicrocontroladoresDocumento10 páginasResumen MicrocontroladoresIvan NuñezAún no hay calificaciones
- Exposicion MicrocontroladoresDocumento45 páginasExposicion MicrocontroladoresAlberto DominguezAún no hay calificaciones
- Apuntes Introduccion A Los MicrocontroladoresDocumento62 páginasApuntes Introduccion A Los MicrocontroladoresJose Carlos OsAún no hay calificaciones
- Pic MicroDocumento51 páginasPic MicrosibiklandiaAún no hay calificaciones
- Microcontrolador COP8 PDFDocumento110 páginasMicrocontrolador COP8 PDFEmmanuelAraujoAún no hay calificaciones
- Esp-Asr-Ebd y BasDocumento23 páginasEsp-Asr-Ebd y BasFrancico Morales C.Aún no hay calificaciones
- Inm. Borrador 1 (3) EstuDocumento15 páginasInm. Borrador 1 (3) EstuYanh Nicolas Castillo DiazAún no hay calificaciones
- Manual de Microcontroladores Orientado Al HC05J1A de MotorolaDocumento36 páginasManual de Microcontroladores Orientado Al HC05J1A de MotorolaKlaus Karner100% (23)
- Sistemas de frenado modernosDocumento28 páginasSistemas de frenado modernosDario Luis Flores CollasAún no hay calificaciones
- El Puerto BDMDocumento3 páginasEl Puerto BDMAnyela Manzano100% (1)
- ELECTRONICA AUTOMOTRIZ Propuesta de CurriculumDocumento3 páginasELECTRONICA AUTOMOTRIZ Propuesta de CurriculumHilda AriasAún no hay calificaciones
- Descripcion de Una Interfaz OBDII PDFDocumento4 páginasDescripcion de Una Interfaz OBDII PDFOscar GutierrezAún no hay calificaciones
- EcusDocumento48 páginasEcus3019030190Aún no hay calificaciones
- 4 El LINDocumento22 páginas4 El LINMauro Quiroz BustosAún no hay calificaciones
- Manual Multipexado ChryslerDocumento23 páginasManual Multipexado ChryslerGabrielAún no hay calificaciones
- Monitoreo de Datos Del AutomovilDocumento123 páginasMonitoreo de Datos Del Automovilwilliam_senati20057051Aún no hay calificaciones
- 01 Inmovilizador Introduccio N PDFDocumento7 páginas01 Inmovilizador Introduccio N PDFFabiánAlanizAún no hay calificaciones
- Conectiviad y RedesDocumento51 páginasConectiviad y RedesYanh Nicolas Castillo DiazAún no hay calificaciones
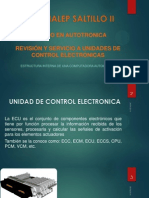
- Unidades de Control ElectrónicoDocumento3 páginasUnidades de Control Electrónico1508reynaAún no hay calificaciones
- 1 - Sistemas Electronicos de La EcuDocumento25 páginas1 - Sistemas Electronicos de La EcuElmer Ariel Aguilar Torrez100% (1)
- Curso InmovilizadoresDocumento18 páginasCurso Inmovilizadoresjgpecast100% (1)
- Technologia MULTIPLEXAJEDocumento22 páginasTechnologia MULTIPLEXAJEDiego Vergara PinoAún no hay calificaciones
- Curso Ok 2010 VagDocumento136 páginasCurso Ok 2010 Vagian pichardoAún no hay calificaciones
- T Uide 172 PDFDocumento76 páginasT Uide 172 PDFHector González100% (1)
- Control de Potencia TRIACDocumento8 páginasControl de Potencia TRIACAntónioRodriguesAún no hay calificaciones
- Presentación para CFIE - MultiplexadoDocumento20 páginasPresentación para CFIE - MultiplexadoMatias NeiraAún no hay calificaciones
- Clase 2 Pid SDocumento36 páginasClase 2 Pid SCarlos Alberto Ramirez LópezAún no hay calificaciones
- Trazador Curvassss PDFDocumento132 páginasTrazador Curvassss PDFArge MoncardonaAún no hay calificaciones
- Control de Motores Paso A Paso Por El Puerto Paralelo Del PCDocumento5 páginasControl de Motores Paso A Paso Por El Puerto Paralelo Del PCanarkia54100% (2)
- Intro ImoDocumento39 páginasIntro Imocuadcasinamba15Aún no hay calificaciones
- Manual Usuario Eurolector OBDII V1.2Documento26 páginasManual Usuario Eurolector OBDII V1.2Luix TiradoAún no hay calificaciones
- Tacómetro para MotoresDocumento7 páginasTacómetro para MotoresFabio Morales A100% (1)
- Microprocesador EcuDocumento21 páginasMicroprocesador EcuJorge AlbertoAún no hay calificaciones
- Temario Del Curso Top 5 On LineDocumento5 páginasTemario Del Curso Top 5 On LineLuix TiradoAún no hay calificaciones
- Transmisor-receptor en un solo dispositivoDocumento7 páginasTransmisor-receptor en un solo dispositivoRuben E. Aguilar LazarteAún no hay calificaciones
- Unidad EsDocumento41 páginasUnidad Esjosecuellar69Aún no hay calificaciones
- Alarmas e InmovilizadoresDocumento19 páginasAlarmas e InmovilizadoresSilva Erwin100% (1)
- CPmarzo2019 WWWDocumento28 páginasCPmarzo2019 WWWBruno Garido PerezAún no hay calificaciones
- 4 Composición de Un DTC y Estrategia de DiagnosticoDocumento3 páginas4 Composición de Un DTC y Estrategia de DiagnosticoJuan Pablo Loayza100% (1)
- Leccion II - Aplicaciones PracticasDocumento13 páginasLeccion II - Aplicaciones PracticasJoseph SantanaAún no hay calificaciones
- Unidad de Control Electronico - ECUDocumento5 páginasUnidad de Control Electronico - ECUJuan RubioAún no hay calificaciones
- Sistema de AlarmaDocumento23 páginasSistema de AlarmaFRANK TORRES DIAZ100% (1)
- El Módulo TIPMDocumento3 páginasEl Módulo TIPMARAMNDO GALVANAún no hay calificaciones
- 18 CHEV Aveo OM U Es MX 84154155A 2017MAR10Documento250 páginas18 CHEV Aveo OM U Es MX 84154155A 2017MAR10Heriberto hernandezAún no hay calificaciones
- DTCS y MasDocumento55 páginasDTCS y MasOscar Villaseñor100% (1)
- Corriente alterna: características y mediciones en circuitos resistivosDocumento11 páginasCorriente alterna: características y mediciones en circuitos resistivosAbraham VegaAún no hay calificaciones
- Luz Antitheft FORDDocumento2 páginasLuz Antitheft FORDDannyDDannyDAún no hay calificaciones
- EDC15+ Funktionsbeschreibung P12 - VG2Documento714 páginasEDC15+ Funktionsbeschreibung P12 - VG2jalvarez_385073Aún no hay calificaciones
- Lab Sem 5 Control de Motor MPAP UnipolarDocumento8 páginasLab Sem 5 Control de Motor MPAP Unipolarwilliam coronadoAún no hay calificaciones
- EpromDocumento4 páginasEpromCarolina AntillonAún no hay calificaciones
- Funcionamiento y Diagnóstico de Redes MultiplexadasDocumento7 páginasFuncionamiento y Diagnóstico de Redes MultiplexadasalejandroAún no hay calificaciones
- Curso ABS-ESP: Diagnóstico con escánerDocumento18 páginasCurso ABS-ESP: Diagnóstico con escánerAbraham CordovasotoAún no hay calificaciones
- TECH TEST (Probador de Módulos de Encendido)Documento3 páginasTECH TEST (Probador de Módulos de Encendido)ygonzalez7Aún no hay calificaciones
- Practica - 1 Electricidad y ElectronicaDocumento1 páginaPractica - 1 Electricidad y ElectronicaAdrian MendozaAún no hay calificaciones
- MicrocontroladoresDocumento46 páginasMicrocontroladoresRodriguez MillanAún no hay calificaciones
- Micro TareaDocumento5 páginasMicro TareaJose Manchay NeiraAún no hay calificaciones
- Microcontrolador y Microprocesador: Diferencias y AplicacionesDocumento24 páginasMicrocontrolador y Microprocesador: Diferencias y AplicacionesJonatan MartínezAún no hay calificaciones
- Mis Ojos A Los MontesDocumento4 páginasMis Ojos A Los MontesAssasingAún no hay calificaciones
- Dios Con Corazon ArdienteDocumento6 páginasDios Con Corazon ArdienteAssasingAún no hay calificaciones
- Scrum Master RetrospectivasDocumento10 páginasScrum Master RetrospectivasAssasingAún no hay calificaciones
- 1 - COBIT - Foundation - Online (Solo Lectura)Documento174 páginas1 - COBIT - Foundation - Online (Solo Lectura)AssasingAún no hay calificaciones
- Workbook Digital Diseño de Vida 2023Documento21 páginasWorkbook Digital Diseño de Vida 2023Assasing100% (1)
- #El ANTI CRISTO - MILTON TERRY.Documento10 páginas#El ANTI CRISTO - MILTON TERRY.AssasingAún no hay calificaciones
- Scrum Master Marcos de Trabajo ÁgilesDocumento4 páginasScrum Master Marcos de Trabajo ÁgilesAssasingAún no hay calificaciones
- Scrum Master Gestión de ImpedimentosDocumento4 páginasScrum Master Gestión de ImpedimentosAssasingAún no hay calificaciones
- Memorizacion IBRL2020Documento7 páginasMemorizacion IBRL2020AssasingAún no hay calificaciones
- Apostasc3ada John OwenDocumento56 páginasApostasc3ada John OwenTalmidAún no hay calificaciones
- #El Pacto de Obras XVDocumento25 páginas#El Pacto de Obras XVAssasingAún no hay calificaciones
- #Quien Es Babilonia PrestonDocumento332 páginas#Quien Es Babilonia PrestonAssasing100% (1)
- Prácticas para La Semana 5Documento1 páginaPrácticas para La Semana 5AssasingAún no hay calificaciones
- Etica y Sociedad 2 Ordinario 2016 PDFDocumento9 páginasEtica y Sociedad 2 Ordinario 2016 PDFAssasingAún no hay calificaciones
- EJERCICIOS Con Sistemas de Notación PosicionalDocumento3 páginasEJERCICIOS Con Sistemas de Notación PosicionalAssasingAún no hay calificaciones
- Investigacion 1 Comparacion de ReligionesDocumento7 páginasInvestigacion 1 Comparacion de ReligionesAssasingAún no hay calificaciones
- El Personaje de JesusDocumento44 páginasEl Personaje de JesusAssasingAún no hay calificaciones
- Etica y Sociedad-II - 14 Junio 2015Documento47 páginasEtica y Sociedad-II - 14 Junio 2015AssasingAún no hay calificaciones
- En Que Consiste Ser CreyenteDocumento2 páginasEn Que Consiste Ser CreyenteAssasingAún no hay calificaciones
- ES Genetec Requisitos Del Sistema de Security CenterDocumento15 páginasES Genetec Requisitos Del Sistema de Security CenterKibsain LunaAún no hay calificaciones
- CondicionalesDocumento7 páginasCondicionalesMariana GómezAún no hay calificaciones
- 7892 - Introducción a la abstracción en ingeniería mecánicaDocumento12 páginas7892 - Introducción a la abstracción en ingeniería mecánicaOliver RamosAún no hay calificaciones
- 2 Estructura de DatosDocumento20 páginas2 Estructura de DatosManuel PerezAún no hay calificaciones
- Componentes Logicos de Una RedDocumento9 páginasComponentes Logicos de Una RedRubi JuarezAún no hay calificaciones
- MadsenAccuScreen Manual Del UsuarioDocumento100 páginasMadsenAccuScreen Manual Del UsuarioFERNANDAAún no hay calificaciones
- Pablo - Valdés - T1 - M3 - Dibujo TecnicoDocumento7 páginasPablo - Valdés - T1 - M3 - Dibujo TecnicoIsaac Herrera CastroAún no hay calificaciones
- 02 Plan de TrabajoDocumento12 páginas02 Plan de TrabajoDaniel David Perneth PenataAún no hay calificaciones
- Estimados Señores. Por Medio de La Presente, y de Acuerdo A Su Solicitud, Sometemos A Su Consideracion Nuestra Oferta Como SigueDocumento3 páginasEstimados Señores. Por Medio de La Presente, y de Acuerdo A Su Solicitud, Sometemos A Su Consideracion Nuestra Oferta Como SigueBredly Rojas TorresAún no hay calificaciones
- Contenidos Teóricos - Análisis Manual e InformesDocumento11 páginasContenidos Teóricos - Análisis Manual e Informeslukardi81Aún no hay calificaciones
- Generalización Del Concepto de Eventos POODocumento10 páginasGeneralización Del Concepto de Eventos POOotra72880Aún no hay calificaciones
- 6.2.2.5 Lab - Configuring Basic EIGRP For IPv4Documento10 páginas6.2.2.5 Lab - Configuring Basic EIGRP For IPv4AJ FJAún no hay calificaciones
- Mi Competencia InicialDocumento1 páginaMi Competencia InicialJosé David Lagunas CruzAún no hay calificaciones
- Pilas Colas Elasticas y DinamicasDocumento21 páginasPilas Colas Elasticas y DinamicasEstuardo NatarenoAún no hay calificaciones
- Estilos y Tablas de Contenidos Tablas e IlustracionesDocumento29 páginasEstilos y Tablas de Contenidos Tablas e Ilustracionessarykiss14100% (1)
- 164796-Instrucciones Solicitud Servicio de Taller Del PMR (685) V2.0Documento25 páginas164796-Instrucciones Solicitud Servicio de Taller Del PMR (685) V2.0Alejandro MarchegianoAún no hay calificaciones
- Entrega 2 PersistenciaDocumento31 páginasEntrega 2 PersistenciaSebastián MontealegreAún no hay calificaciones
- Examenes Computacion 1ro A 9noDocumento13 páginasExamenes Computacion 1ro A 9noDjOmar HernándezAún no hay calificaciones
- Como Utilizar Cobian 8.0Documento10 páginasComo Utilizar Cobian 8.0alphazx2Aún no hay calificaciones
- Semáforo Calle 72 con Cra 60Documento9 páginasSemáforo Calle 72 con Cra 60Eblyn CarrascalAún no hay calificaciones
- Servidor LDAP en Debian 6 SqueezeDocumento11 páginasServidor LDAP en Debian 6 Squeezegustavoq79Aún no hay calificaciones
- Capítulo 4 Todo Puede Ser AutomatizadoDocumento8 páginasCapítulo 4 Todo Puede Ser AutomatizadoRafael Meza DominguezAún no hay calificaciones
- Guía de Diagnóstico y Apropiación de ConceptosDocumento3 páginasGuía de Diagnóstico y Apropiación de ConceptosCristhian TaveraAún no hay calificaciones
- Erick - Vazquez - ACTIVIDAD 3 - Fundamentos de ProgramaciónDocumento14 páginasErick - Vazquez - ACTIVIDAD 3 - Fundamentos de ProgramaciónErick VázquezAún no hay calificaciones
- Ejercicios ResueltosDocumento12 páginasEjercicios ResueltosPecos Bill Pecosin LopezAún no hay calificaciones
- Cómo Crear Un Formulario en WordDocumento3 páginasCómo Crear Un Formulario en WordRuth RonnebeckAún no hay calificaciones
- Barras de Herramientas WordDocumento4 páginasBarras de Herramientas WordBlady DominguezAún no hay calificaciones