También podría gustarte
- INTERACCIONESDocumento6 páginasINTERACCIONESYenireth UrdanetaAún no hay calificaciones
- Pro ProteinasDocumento1 páginaPro ProteinasSosimo BenitezAún no hay calificaciones
- Estructuras y funciones de los biolípidosDocumento6 páginasEstructuras y funciones de los biolípidosMaite CambraAún no hay calificaciones
- El Cuerpo Humano Como Sistema TermodinamicoDocumento10 páginasEl Cuerpo Humano Como Sistema TermodinamicoMarie LiaAún no hay calificaciones
- Destino Metabólico Del GlicerolDocumento10 páginasDestino Metabólico Del GlicerolJorge Luis Vera TrujilloAún no hay calificaciones
- Guias de Laboratorio de Fisica Virtual Electromagnetica-II-2020Documento41 páginasGuias de Laboratorio de Fisica Virtual Electromagnetica-II-2020Jocelyn GarcesAún no hay calificaciones
- Regulación del ciclo de Krebs a través de la modulación alostérica y covalenteDocumento2 páginasRegulación del ciclo de Krebs a través de la modulación alostérica y covalenteRosa Marcela Rojas CorralesAún no hay calificaciones
- Problemas de Dinámica Del Movimiento Circular UniformeDocumento5 páginasProblemas de Dinámica Del Movimiento Circular UniformelocoAún no hay calificaciones
- Respiración CelularDocumento8 páginasRespiración CelularDavid AbregoAún no hay calificaciones
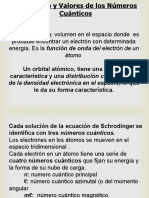
- Numeros CuanticosDocumento48 páginasNumeros CuanticosKaty Sanchez100% (1)
- Fisica Labo 10 Unmsm CuestionarioDocumento3 páginasFisica Labo 10 Unmsm CuestionarioBrandy ParkerAún no hay calificaciones
- Unidad 7. Trabajo y EnergíaDocumento9 páginasUnidad 7. Trabajo y EnergíaNindirí ArmentaAún no hay calificaciones
- Movimiento Uniforme Rectilineo DesaceleradoDocumento17 páginasMovimiento Uniforme Rectilineo DesaceleradoSTEVEN KELLYAún no hay calificaciones
- Sistema de UnidadesDocumento9 páginasSistema de UnidadesWendy NarvaezAún no hay calificaciones
- Problemas de Cinemática: Velocidad, Aceleración y TiempoDocumento2 páginasProblemas de Cinemática: Velocidad, Aceleración y TiempoAlicia MaqueiraAún no hay calificaciones
- Informe Salida de Campo Yasuní UCE - CualitativoDocumento18 páginasInforme Salida de Campo Yasuní UCE - CualitativoAlejandro Borja GoyesAún no hay calificaciones
- Modelo de FitzHugh NagumoDocumento8 páginasModelo de FitzHugh Nagumoadriana salazar riveraAún no hay calificaciones
- Calculo 21Documento126 páginasCalculo 21exzacarias66Aún no hay calificaciones
- Síntesis de CisteínaDocumento12 páginasSíntesis de CisteínacristellAún no hay calificaciones
- 09 - Equilibrio QuimicoDocumento26 páginas09 - Equilibrio QuimicoDiego GarciaAún no hay calificaciones
- Informe Fisica LabDocumento10 páginasInforme Fisica LabSara Ospina BuitragoAún no hay calificaciones
- IV Trabajo y EnergíaDocumento40 páginasIV Trabajo y EnergíaSamuel Eduardo Carvallo HernandezAún no hay calificaciones
- Factores de Conversion PDFDocumento3 páginasFactores de Conversion PDFJaneth Del Carmen Moncada GaonaAún no hay calificaciones
- Taller BioenergeticaDocumento5 páginasTaller BioenergeticalhvillegasmAún no hay calificaciones
- ATP Sintasa-1Documento15 páginasATP Sintasa-1Omar BojorquezAún no hay calificaciones
- Laboratorio 12Documento11 páginasLaboratorio 12DavidAún no hay calificaciones
- Wuolah-free-Apuntes Bioquímica MetabólicaDocumento70 páginasWuolah-free-Apuntes Bioquímica MetabólicaIsidro SobrinoAún no hay calificaciones
- Capitulo1-Tesis ExoesqueletoDocumento0 páginasCapitulo1-Tesis Exoesqueletosnahhans2013Aún no hay calificaciones
- Taller Mecanica Corte IDocumento3 páginasTaller Mecanica Corte IKaren CabreraAún no hay calificaciones
- Teoria Semana IIIDocumento39 páginasTeoria Semana IIIDiego CesarAún no hay calificaciones
- 01 Pendulo SimpleDocumento3 páginas01 Pendulo SimpleandresAún no hay calificaciones
- Determinación Experimental de La Gravedad en BogotáDocumento3 páginasDeterminación Experimental de La Gravedad en BogotáANDRESAún no hay calificaciones
- Módulo II - TrigonometríaDocumento13 páginasMódulo II - TrigonometríaJean IngaAún no hay calificaciones
- Taller - HidroestaticaDocumento6 páginasTaller - HidroestaticaFelix DiazAún no hay calificaciones
- 05 TALLER Estática de Una PartículaDocumento4 páginas05 TALLER Estática de Una PartículajoseAún no hay calificaciones
- Clase 8 MonólogoDocumento27 páginasClase 8 MonólogoSidny RodriguezAún no hay calificaciones
- Campo eléctrico de una placa infinitaDocumento8 páginasCampo eléctrico de una placa infinitaPokemon GoAún no hay calificaciones
- Taller Física 02Documento19 páginasTaller Física 02Roosevell MejiaAún no hay calificaciones
- TALLER No 2 Mecanica 2011BDocumento1 páginaTALLER No 2 Mecanica 2011Bandres perezAún no hay calificaciones
- TareaDocumento2 páginasTareaFernando Arrieta GrassAún no hay calificaciones
- Laboratorio Meì - Todo CoyleDocumento4 páginasLaboratorio Meì - Todo CoyleCarlos Erpel SandovalAún no hay calificaciones
- Resumen Leithold PDFDocumento3 páginasResumen Leithold PDFCamila Mejia GarciaAún no hay calificaciones
- Informe Nº2Documento11 páginasInforme Nº2Yoselin Jazmin Azabache AbdhalaAún no hay calificaciones
- Quimicqa 1-6Documento19 páginasQuimicqa 1-6Marlon Merino100% (1)
- Sintesis y Caracterizacion Del Jabon A Partir Del Aceite de CocoDocumento6 páginasSintesis y Caracterizacion Del Jabon A Partir Del Aceite de CocoVALERIA ALEJANDRA VILLEGAS ALVAREZAún no hay calificaciones
- Análisis Dimensional y Factores de ConversiónDocumento32 páginasAnálisis Dimensional y Factores de Conversiónkohina SanAún no hay calificaciones
- A1-Acido y BaseDocumento17 páginasA1-Acido y BaseKOBRINJAAún no hay calificaciones
- FS-100: Fórmulas para la I Unidad de FísicaDocumento3 páginasFS-100: Fórmulas para la I Unidad de FísicaTaiyoFurukawaAún no hay calificaciones
- Metabolismo en Animales EctotermosDocumento7 páginasMetabolismo en Animales EctotermosRonald YonoffAún no hay calificaciones
- Método de Coeficientes IndeterminadosDocumento4 páginasMétodo de Coeficientes IndeterminadosJOHAN SEBASTIAN GOMEZ PE�UELAAún no hay calificaciones
- Razones trigonométricas para medir alturas y distanciasDocumento1 páginaRazones trigonométricas para medir alturas y distanciasObatala En El Paisaje NoctambuloAún no hay calificaciones
- Refuerzo OnceDocumento4 páginasRefuerzo OnceMónica Uribe100% (2)
- Taller N°2 Física (2020)Documento11 páginasTaller N°2 Física (2020)JesusSuarezAún no hay calificaciones
- Aspectos Biologicos de Gracilaria ChilensisDocumento5 páginasAspectos Biologicos de Gracilaria Chilensisemilymr3Aún no hay calificaciones
- BBM1 U2 Ea ArccDocumento4 páginasBBM1 U2 Ea ArccArantza CanalesAún no hay calificaciones
- Conservación energía transformación formasDocumento6 páginasConservación energía transformación formasPATY OSORIOAún no hay calificaciones
- Sistema masa-resorte: modelo matemático y análisis dinámicoDocumento13 páginasSistema masa-resorte: modelo matemático y análisis dinámicoanthony0% (1)
- Metodo de Separacion de VariablesDocumento9 páginasMetodo de Separacion de VariablesBrianda Villanueva EscobarAún no hay calificaciones
- MovimientoCinéticaDocumento1 páginaMovimientoCinéticaAlonso CASTANEDA MURCIAAún no hay calificaciones
- Elaboración Del Marco TeóricoDocumento3 páginasElaboración Del Marco TeóricoAngie DanielaAún no hay calificaciones
- Análisis GráficoDocumento16 páginasAnálisis GráficoERIC SEBASTIAN PEÑA PEREZAún no hay calificaciones
- Informe Numero 7, Balanza de Fuerzas Paralelas.Documento19 páginasInforme Numero 7, Balanza de Fuerzas Paralelas.ERIC SEBASTIAN PEÑA PEREZAún no hay calificaciones
- Informe #01 Compocion y Descomposición de VectoresDocumento27 páginasInforme #01 Compocion y Descomposición de VectoresERIC SEBASTIAN PEÑA PEREZAún no hay calificaciones
- Informe #10 Inercia RotacionalDocumento18 páginasInforme #10 Inercia RotacionalERIC SEBASTIAN PEÑA PEREZAún no hay calificaciones
- 5.1 Definicion, Importancia y Aplicaciones Del Aire AcondicionadoDocumento20 páginas5.1 Definicion, Importancia y Aplicaciones Del Aire AcondicionadoJonathan Sustaita100% (3)
- 1967 - FI002-Sílabo Física Aplicada A La SaludDocumento4 páginas1967 - FI002-Sílabo Física Aplicada A La SaludMariafe GuardaminoAún no hay calificaciones
- Valores Comerciales de Diodos de Potencia, Aplicaciones y Decisión de TRIACDocumento12 páginasValores Comerciales de Diodos de Potencia, Aplicaciones y Decisión de TRIACOrlando Zech RamosAún no hay calificaciones
- Practica Calificada Mecanica de FluidosDocumento2 páginasPractica Calificada Mecanica de FluidosGustavoCastañedaLópezAún no hay calificaciones
- PDF Modelo de Plan de Tesis UnfvDocumento19 páginasPDF Modelo de Plan de Tesis UnfvVA GabyAún no hay calificaciones
- Clase 6 Sistema SocialDocumento8 páginasClase 6 Sistema SocialArchinigo Donguri Andāson TenshiAún no hay calificaciones
- Laboratorio 2 Biologia VegetalDocumento3 páginasLaboratorio 2 Biologia VegetalManuela Grajales CardonaAún no hay calificaciones
- NECHÍDocumento232 páginasNECHÍJose Gamaliel Medina HenaoAún no hay calificaciones
- Plan de MATEMÁTICAS 9° 2021Documento8 páginasPlan de MATEMÁTICAS 9° 2021hubaplaAún no hay calificaciones
- Ideas La AutoevaluacionDocumento3 páginasIdeas La AutoevaluacionJulio Cesar GarciaAún no hay calificaciones
- Capítulo 1 - Importancia de La Biología Celular y Tisular y Técnicas de Estudio de Células y TejidosDocumento21 páginasCapítulo 1 - Importancia de La Biología Celular y Tisular y Técnicas de Estudio de Células y TejidosAlexandra AndradeAún no hay calificaciones
- Practico NR 6Documento11 páginasPractico NR 6JHARPA NHYNHAAún no hay calificaciones
- Técnicas de investigación documentales, de campo y experimentalesDocumento2 páginasTécnicas de investigación documentales, de campo y experimentalesJORGE ANDRES RUIZ SAAVEDRAAún no hay calificaciones
- EnacomDocumento11 páginasEnacomCrónicaAún no hay calificaciones
- Silabo Matematica 2 UcvDocumento7 páginasSilabo Matematica 2 UcvEdson G. ClimacoAún no hay calificaciones
- Politica y Legislacion EducativaDocumento6 páginasPolitica y Legislacion Educativajorge MartinezAún no hay calificaciones
- Análisis de Los Objetivos de Desarrollo Sostenible Desde La Perspectiva de GéneroDocumento5 páginasAnálisis de Los Objetivos de Desarrollo Sostenible Desde La Perspectiva de GéneroLilian Johanna Fernández RodriguezAún no hay calificaciones
- Modelo de Trabajo Academico FinalDocumento49 páginasModelo de Trabajo Academico FinalJOAN RODOLFO PURIS CONDORAún no hay calificaciones
- 23 - Deiner MenesesDocumento11 páginas23 - Deiner MenesesDEINERAún no hay calificaciones
- UNIABIERTA: PSICOLOGÍA-METODOLOGÍA DE LA INVESTIGACIÓN IDocumento4 páginasUNIABIERTA: PSICOLOGÍA-METODOLOGÍA DE LA INVESTIGACIÓN IMadeley Moris HenríquezAún no hay calificaciones
- Informe Actividad Experimental-Partes Por MillonDocumento3 páginasInforme Actividad Experimental-Partes Por MillonMariana González GuevaraAún no hay calificaciones
- Web SantiDocumento11 páginasWeb SantiSanti Clusella MorAún no hay calificaciones
- Apuntes T.2 Impacto AmbientalDocumento19 páginasApuntes T.2 Impacto AmbientalSomeAún no hay calificaciones
- Carrizo - DenicolaiDocumento10 páginasCarrizo - DenicolaiMariana CarrizoAún no hay calificaciones
- Ficha de Trabajo 2017 Semana26Documento4 páginasFicha de Trabajo 2017 Semana26Montserrat CaviedesAún no hay calificaciones
- El Concreto en La ConstruccionDocumento20 páginasEl Concreto en La ConstruccionJim Castro FarfanAún no hay calificaciones
- DEFINICIÓNDocumento4 páginasDEFINICIÓNfredyAún no hay calificaciones
- El Barroco en España y América by Mayra ChavarriaDocumento1 páginaEl Barroco en España y América by Mayra ChavarriaReyna RamirezAún no hay calificaciones
- CLASE 10 +Tipos+de+EscuchaDocumento9 páginasCLASE 10 +Tipos+de+Escuchasilvia villellaAún no hay calificaciones
- Metodo de Separacion Liquido LiquidoDocumento2 páginasMetodo de Separacion Liquido Liquidoleydi aquino villarAún no hay calificaciones