También podría gustarte
- Conicas InformeDocumento23 páginasConicas InformeKenyi Hidalgo Diaz33% (3)
- Plan de Aseguramiento de Obras de Calidad en Obras de Construcción PDFDocumento1 páginaPlan de Aseguramiento de Obras de Calidad en Obras de Construcción PDFEMERSON FARLEY DURAN CARRENOAún no hay calificaciones
- PREPARACION Y VALORACION DE NITRATO DE PLATA 0 ReparadoDocumento5 páginasPREPARACION Y VALORACION DE NITRATO DE PLATA 0 ReparadoEdgar Michel Cruzado Barboza100% (2)
- Tlaxacalancingo Oliveira 2Documento57 páginasTlaxacalancingo Oliveira 2Angelica CorreaAún no hay calificaciones
- Trabajo Aplicado Marca Chevrolet (Final)Documento28 páginasTrabajo Aplicado Marca Chevrolet (Final)Renato AncajimaAún no hay calificaciones
- Investigación Caracteristicaas y ElementosDocumento26 páginasInvestigación Caracteristicaas y Elementosbrandon jherald zapana chiquiAún no hay calificaciones
- CónicasDocumento25 páginasCónicasrociodemorilloAún no hay calificaciones
- CÓNICASDocumento26 páginasCÓNICASjosueAún no hay calificaciones
- Representar Funciones en El Plano Cartesiano Unidad 7Documento25 páginasRepresentar Funciones en El Plano Cartesiano Unidad 7Sofia GuerreroAún no hay calificaciones
- CUADRICAS DefiniciónDocumento33 páginasCUADRICAS DefiniciónPablo RamirezAún no hay calificaciones
- CALCULO Trabajo de InvestigacionDocumento10 páginasCALCULO Trabajo de InvestigacionMIRKO SONY MAMANI MAMANIAún no hay calificaciones
- Superficies CuádricasDocumento33 páginasSuperficies CuádricasManuel Buleje Diaz0% (1)
- Conic AsDocumento23 páginasConic AsFede NavarreteAún no hay calificaciones
- Ensayo de HiperbolasDocumento17 páginasEnsayo de HiperbolasEdgar De LozaAún no hay calificaciones
- Elipse 2014Documento16 páginasElipse 2014Gefershon Stalyn Cuevas SaraviaAún no hay calificaciones
- ALGEBRADocumento10 páginasALGEBRADiego AssamAún no hay calificaciones
- Proyecto 4º PeriodoDocumento20 páginasProyecto 4º PeriodoSantiago CastilloAún no hay calificaciones
- Inv. Unidad 3Documento11 páginasInv. Unidad 3vladimir KuAún no hay calificaciones
- Plano NumericoDocumento11 páginasPlano NumericoNicolas colmenarezAún no hay calificaciones
- 41 Matematicas-Iv PDFDocumento140 páginas41 Matematicas-Iv PDFtheundertakermk9Aún no hay calificaciones
- CALCULODocumento14 páginasCALCULOMIRKO SONY MAMANI MAMANIAún no hay calificaciones
- Geometria AnaliticaDocumento12 páginasGeometria AnaliticaNina Davis100% (1)
- AlgebraDocumento7 páginasAlgebraVale LiñanAún no hay calificaciones
- MatematicaDocumento6 páginasMatematicaMaritza BriceñoAún no hay calificaciones
- Unidad I - Secciones Conicas - Superficies CuadricasDocumento34 páginasUnidad I - Secciones Conicas - Superficies CuadricasArturoQuirozMedinaAún no hay calificaciones
- LuuuuuuuuuuuuuuuuuuuDocumento7 páginasLuuuuuuuuuuuuuuuuuuuLuciana OrtegaAún no hay calificaciones
- Unidad 2.Documento22 páginasUnidad 2.Ramón Gerardo Pineda GarcíaAún no hay calificaciones
- Cónicas No DegeneradasDocumento4 páginasCónicas No DegeneradasGinger CedilloAún no hay calificaciones
- Mat EstDocumento14 páginasMat EstCristobal OrizAún no hay calificaciones
- Ecuaciones de La RectaDocumento11 páginasEcuaciones de La Rectacvcarlosvilla1100% (3)
- Ecuaciones Paramétricas y Cálculo-Morales CristoferDocumento37 páginasEcuaciones Paramétricas y Cálculo-Morales CristoferCristofer MoralesAún no hay calificaciones
- Conicas 2020 - FinalDocumento100 páginasConicas 2020 - FinalROMMEL AARON REYNAGA ALVARADOAún no hay calificaciones
- Hiperbola MatematikaDocumento8 páginasHiperbola MatematikaWhina AmoyAún no hay calificaciones
- CIRCUNFERENCIADocumento21 páginasCIRCUNFERENCIAJuliet RomeroAún no hay calificaciones
- GeometriaDocumento13 páginasGeometriaDixcel - TecgAún no hay calificaciones
- Definición deDocumento21 páginasDefinición deSandy NicolaldeAún no hay calificaciones
- Superficies CuadricasDocumento29 páginasSuperficies CuadricasNoelia YarlequeAún no hay calificaciones
- Elipse, HipérbolaDocumento9 páginasElipse, HipérbolaNicole Suntaxi AlvearAún no hay calificaciones
- ParabolaDocumento6 páginasParabolatonybats50% (2)
- Tema - 1 Secciones CónicasDocumento151 páginasTema - 1 Secciones CónicasAbel EstebanAún no hay calificaciones
- Guía Práctica N 1 (1) MAEMATICASDocumento25 páginasGuía Práctica N 1 (1) MAEMATICASyenny vivasAún no hay calificaciones
- Parabola MatematicaDocumento32 páginasParabola MatematicaChristopher Joseph Bobadilla ApoloAún no hay calificaciones
- La Recta en El PlanoDocumento13 páginasLa Recta en El PlanoJorge CamacaroAún no hay calificaciones
- Secciones ConicasDocumento21 páginasSecciones ConicasAlex MejiaAún no hay calificaciones
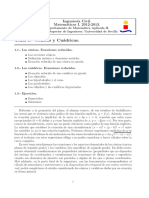
- Tema 1. Cónicas y CuádricasDocumento29 páginasTema 1. Cónicas y Cuádricasblack.tagusAún no hay calificaciones
- Clases de CónicasDocumento25 páginasClases de CónicasmenandyjoseAún no hay calificaciones
- La Recta, Parabola, Elipse, Hiperbola, CircunferenciaDocumento17 páginasLa Recta, Parabola, Elipse, Hiperbola, CircunferenciaJhonatan MartinezAún no hay calificaciones
- Tema I Ecuación de La CircunferenciaDocumento10 páginasTema I Ecuación de La CircunferenciaSalud y VidaAún no hay calificaciones
- Ecuación Canónica de Una ElipseDocumento6 páginasEcuación Canónica de Una ElipseLesly JaliriAún no hay calificaciones
- Grafica de Una Ecuacion y Lugares GeometricosDocumento41 páginasGrafica de Una Ecuacion y Lugares GeometricosJosue Andy Luis Mateo40% (5)
- Geometria - TrabajoDocumento27 páginasGeometria - TrabajoNoel Madian Rodriguez Freites100% (2)
- 2 - Cónicas, Cuádricas y Curvas Parametrizadas PDFDocumento23 páginas2 - Cónicas, Cuádricas y Curvas Parametrizadas PDFmelanieAún no hay calificaciones
- Investigacion de ConicasDocumento22 páginasInvestigacion de ConicasDaniela Fuentes Santos 12Aún no hay calificaciones
- 29 Hoja de Vida Clasica NegroDocumento15 páginas29 Hoja de Vida Clasica NegroJulySoteloHernandezAún no hay calificaciones
- Parabola 2022 2Documento22 páginasParabola 2022 2JULIO MOHAMED TUYA CALVOAún no hay calificaciones
- Tarea 1 de Calculo IDocumento9 páginasTarea 1 de Calculo ILeonarda YaporAún no hay calificaciones
- Lugares Geométricos en El Plano.Documento20 páginasLugares Geométricos en El Plano.Jesús MarcanoAún no hay calificaciones
- La Linea Recta PDFDocumento42 páginasLa Linea Recta PDFRicardo CruzAún no hay calificaciones
- HiperbolaDocumento15 páginasHiperbolaVeronica YadiraAún no hay calificaciones
- Proyecto La RectaDocumento18 páginasProyecto La RectaGis NoemiAún no hay calificaciones
- La ElipseDocumento7 páginasLa ElipseCesar Ramos Herrera100% (1)
- Consolid 11no Secciones ConicasDocumento28 páginasConsolid 11no Secciones Conicasyoandris100% (1)
- Marcoteorico1 PDFDocumento3 páginasMarcoteorico1 PDFGiulliana Sanchez MartinezAún no hay calificaciones
- Cambio Climatico en El PeruDocumento22 páginasCambio Climatico en El PeruGiulliana Sanchez MartinezAún no hay calificaciones
- Avance FisicaDocumento6 páginasAvance FisicaGiuliana Sanchez MartinezAún no hay calificaciones
- ComplejosDocumento16 páginasComplejosGiulliana Sanchez MartinezAún no hay calificaciones
- InglesDocumento1 páginaInglesGiulliana Sanchez MartinezAún no hay calificaciones
- Cambio Climatico - OratoriaDocumento10 páginasCambio Climatico - OratoriaGiulliana Sanchez MartinezAún no hay calificaciones
- El Perú Sus Postres y DulcesDocumento14 páginasEl Perú Sus Postres y DulcesGiulliana Sanchez MartinezAún no hay calificaciones
- Problema PropuestoDocumento19 páginasProblema PropuestoGiulliana Sanchez MartinezAún no hay calificaciones
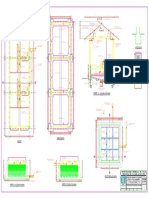
- 01 03 Estructuras Hidráulicas en Planta de Tratamiento QUILLA-Lecho Secado y Filtro PercoladorDocumento1 página01 03 Estructuras Hidráulicas en Planta de Tratamiento QUILLA-Lecho Secado y Filtro PercoladorGiulliana Sanchez MartinezAún no hay calificaciones
- DIFERENCIASDocumento10 páginasDIFERENCIASGiulliana Sanchez MartinezAún no hay calificaciones
- Grupo X - RapidasDocumento26 páginasGrupo X - RapidasGiulliana Sanchez MartinezAún no hay calificaciones
- Ptar TotoraDocumento16 páginasPtar TotoraGiulliana Sanchez MartinezAún no hay calificaciones
- Sistema de LagunasDocumento1 páginaSistema de LagunasGiulliana Sanchez MartinezAún no hay calificaciones
- 01.poblacion CaudalDocumento24 páginas01.poblacion CaudalGiulliana Sanchez MartinezAún no hay calificaciones
- Taller SWC 01Documento18 páginasTaller SWC 01Giulliana Sanchez MartinezAún no hay calificaciones
- Amado Kryon - Carrol Lee - Atributos para La Ascensión y El Poder de La Conciencia Humana 06.02Documento13 páginasAmado Kryon - Carrol Lee - Atributos para La Ascensión y El Poder de La Conciencia Humana 06.02Heraclio LópezAún no hay calificaciones
- Base de Datos Ames Estadistica 1Documento40 páginasBase de Datos Ames Estadistica 1DianaVanegasAún no hay calificaciones
- TeatroDocumento10 páginasTeatrovityaAún no hay calificaciones
- Act 6 Est HabilidadesDocumento4 páginasAct 6 Est HabilidadesAlejandra ArandaAún no hay calificaciones
- Listas Provisionales Definitivas de AdjudicaciDocumento8 páginasListas Provisionales Definitivas de AdjudicaciAngela Hierro BerceoAún no hay calificaciones
- Ecuacion de PoleDocumento46 páginasEcuacion de Polejuan.pis03Aún no hay calificaciones
- Manual Ps3Documento22 páginasManual Ps3Ricardo HerediaAún no hay calificaciones
- TABLAS GANADORES - OFICIALES Con CorreccionesDocumento14 páginasTABLAS GANADORES - OFICIALES Con Correccionesgamboajesus513Aún no hay calificaciones
- OrientacionparaPadres Primaria 22072020Documento43 páginasOrientacionparaPadres Primaria 22072020Miguel Ángel Barragán GuerreroAún no hay calificaciones
- Fichas Tecnicas Calzado 70Documento2 páginasFichas Tecnicas Calzado 70Valentina CastilloAún no hay calificaciones
- Revestimiento 1-06Documento17 páginasRevestimiento 1-06Natalia ManriqueAún no hay calificaciones
- Subestacion ElectricaDocumento4 páginasSubestacion Electricael pepesAún no hay calificaciones
- HT CLBT 700Documento17 páginasHT CLBT 700Mauro AntihualAún no hay calificaciones
- Quimica 2°año IiDocumento36 páginasQuimica 2°año IiOscar Rodríguez GómezAún no hay calificaciones
- La Mentoria Como Estrategia para El Empoderamiento Del Preadolescente en Riesgo SocialDocumento14 páginasLa Mentoria Como Estrategia para El Empoderamiento Del Preadolescente en Riesgo Socialmarilurs6749100% (1)
- Semana 01Documento5 páginasSemana 01Eliud Chirinos ZevallosAún no hay calificaciones
- Desarrollo de La Química Analítica en Función Del TiempoDocumento5 páginasDesarrollo de La Química Analítica en Función Del Tiempokaren mestraAún no hay calificaciones
- Mapa Conceptual de La UnidadDocumento4 páginasMapa Conceptual de La UnidadTAtiizz VillalobosAún no hay calificaciones
- Tipos de Servidores en SQLDocumento11 páginasTipos de Servidores en SQLPaus PachecoAún no hay calificaciones
- Manual para Elaborar Proyectos NHLDocumento96 páginasManual para Elaborar Proyectos NHLFernandoAntonioFloresLimoAún no hay calificaciones
- Ponencias FotovoltaicaDocumento58 páginasPonencias FotovoltaicaPablo VazquezAún no hay calificaciones
- Matematicas Financieras 1 PDFDocumento271 páginasMatematicas Financieras 1 PDFSofi Alvarez100% (3)
- Fisiologia CardiovascularDocumento12 páginasFisiologia CardiovascularLisset Arizoca LongoriaAún no hay calificaciones
- Evaluación SumativaDocumento3 páginasEvaluación SumativaGlenda Auristela Castellano CevallosAún no hay calificaciones
- Ponencias Jornada 14 Marzo SCI Edificios en AlturaDocumento205 páginasPonencias Jornada 14 Marzo SCI Edificios en AlturamareAún no hay calificaciones
- Apuntes de Ciudadanía Global - Segundo MóduloDocumento44 páginasApuntes de Ciudadanía Global - Segundo MóduloOMAR GRIJALVA RODRIGUEZAún no hay calificaciones