También podría gustarte
- Unidad 3 Lineas y Protecciones I PDFDocumento195 páginasUnidad 3 Lineas y Protecciones I PDFJeremy Fernandez Pizarro100% (1)
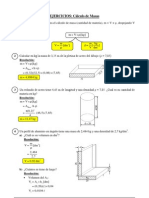
- Ejercicios. Cálculo de MasasDocumento10 páginasEjercicios. Cálculo de MasasEdgard Leo86% (7)
- Ejercicios de TermoDocumento35 páginasEjercicios de TermoJoanán Reyes Aranda100% (3)
- Taller Resuelto QG FinalDocumento4 páginasTaller Resuelto QG FinalCamargo AlfredoAún no hay calificaciones
- Practica No 4 Pendulo Fisico (2-2017)Documento9 páginasPractica No 4 Pendulo Fisico (2-2017)Arturo Mendoza Berrios100% (2)
- Fisica 1200 I2Documento10 páginasFisica 1200 I2Romer BaltazarAún no hay calificaciones
- Juan Leiva Tarea S7Documento11 páginasJuan Leiva Tarea S7juan leivaAún no hay calificaciones
- Info 100Documento28 páginasInfo 100messiaschoquehuaytaAún no hay calificaciones
- Labfis-102 Informe 3Documento18 páginasLabfis-102 Informe 3Ariel OrtizAún no hay calificaciones
- Practica N 3Documento18 páginasPractica N 3Moises Mimo RomeroAún no hay calificaciones
- Informe Lab - Fis. 2 1Documento12 páginasInforme Lab - Fis. 2 1juan silvaAún no hay calificaciones
- Informe Numero 2 de Fisica 102Documento21 páginasInforme Numero 2 de Fisica 102Brisa RojasAún no hay calificaciones
- Tarea 01 Fis 102Documento8 páginasTarea 01 Fis 102Deymar Choque ColqueAún no hay calificaciones
- Lab Monica Fis 2Documento19 páginasLab Monica Fis 2VARA LOPEZ RAYSA PAMELAAún no hay calificaciones
- Movimiento OscilatorioDocumento17 páginasMovimiento OscilatorioPamela Garboza0% (2)
- Proyecto Final Caf3Documento6 páginasProyecto Final Caf3Fabricio AstulleAún no hay calificaciones
- 1 Movimiento Periodico Parte1Documento25 páginas1 Movimiento Periodico Parte1Abner MoreiraAún no hay calificaciones
- Informe Laboratorio 2 Fisica GeneralDocumento21 páginasInforme Laboratorio 2 Fisica GeneralDana MejiaAún no hay calificaciones
- Informe Pendulo SimpleDocumento6 páginasInforme Pendulo SimplestefanyAún no hay calificaciones
- 1-Movimiento Periodico-Parte1 PDFDocumento25 páginas1-Movimiento Periodico-Parte1 PDFnestor quijadaAún no hay calificaciones
- Lab 11 Pendulo SimpleDocumento10 páginasLab 11 Pendulo SimpleMayled PeñuelaAún no hay calificaciones
- MasDocumento15 páginasMaserlin100% (3)
- Informe 10-11Documento12 páginasInforme 10-11Gianfranco GascaAún no hay calificaciones
- Lab Fisica Practica 9Documento7 páginasLab Fisica Practica 9iiascribd100% (1)
- Consulta 2 F2 CS220Documento10 páginasConsulta 2 F2 CS220Alvarez PedroAún no hay calificaciones
- Conclusion EsDocumento5 páginasConclusion EsJosqui MarinAún no hay calificaciones
- Inform 2 Fisic A 102Documento20 páginasInform 2 Fisic A 102Lenin SurriabreAún no hay calificaciones
- PÉNDULO SIMPLE: PERIODO, LONGITUD Y GRAVEDADDocumento14 páginasPÉNDULO SIMPLE: PERIODO, LONGITUD Y GRAVEDADCarlos Andres Marin100% (2)
- Tarea OndasDocumento6 páginasTarea OndasBárbara VasquezAún no hay calificaciones
- Movimiento Armonico SimpleDocumento17 páginasMovimiento Armonico SimpleIvon GodinesAún no hay calificaciones
- Practica No 4 Pendulo Fisico 2 2017Documento9 páginasPractica No 4 Pendulo Fisico 2 2017Kevin Abad liquitaya lopezAún no hay calificaciones
- Laboratorio Pendulo SimpleDocumento5 páginasLaboratorio Pendulo SimpleJuan David Silva VegaAún no hay calificaciones
- Taller de Movimiento Armonico SimpleDocumento6 páginasTaller de Movimiento Armonico Simpledagoberto100% (1)
- Practica No 4 Pendulo Fisico 2Documento9 páginasPractica No 4 Pendulo Fisico 2Danitza Choque IbañezAún no hay calificaciones
- Conceptos clave del movimiento armónicoDocumento3 páginasConceptos clave del movimiento armónicoManuel Joaquin Caro FlorezAún no hay calificaciones
- Lab Fis NeytonDocumento22 páginasLab Fis NeytonVARA LOPEZ RAYSA PAMELAAún no hay calificaciones
- Informe 1 Fisica 2Documento30 páginasInforme 1 Fisica 2Mabel Nicol Perez HurtadoAún no hay calificaciones
- PDF Conclusion Es - CompressDocumento4 páginasPDF Conclusion Es - CompressKEIKO FABIANA ZETA TEMOCHEAún no hay calificaciones
- 7 Movimiento Armónico SimpleDocumento31 páginas7 Movimiento Armónico SimpleJUAN DAVID RAMIREZ HERRERAAún no hay calificaciones
- Segundo Informe Fis102Documento21 páginasSegundo Informe Fis102Montaño Lero KevinAún no hay calificaciones
- Taller de Movimiento Armonico SimpleDocumento7 páginasTaller de Movimiento Armonico SimpleErika TatianaAún no hay calificaciones
- Movimiento OscilatorioDocumento16 páginasMovimiento OscilatorioCadHome67% (3)
- INFORME - Movimiento Armónico SimpleDocumento8 páginasINFORME - Movimiento Armónico SimpleBrianVega0% (1)
- Practica 1Documento10 páginasPractica 1Eduardo BallezaAún no hay calificaciones
- Lab 1 y 2 fisicaIIIDocumento8 páginasLab 1 y 2 fisicaIIILorena NietoAún no hay calificaciones
- Péndulo SimpleDocumento9 páginasPéndulo SimpleHIBBYS MISHEL ESCORCIA MUNIVEAún no hay calificaciones
- Centro de OscilacionDocumento7 páginasCentro de OscilacionOswaldo GalvezAún no hay calificaciones
- Movimiento Circular Uniforme y Movimiento Armónico SimpleDocumento12 páginasMovimiento Circular Uniforme y Movimiento Armónico SimpleArturo Ledezma0% (1)
- Movimiento Armonico Pendulo SimpleDocumento5 páginasMovimiento Armonico Pendulo SimpleJose LazcanoAún no hay calificaciones
- FIS 102 N3Documento16 páginasFIS 102 N3josecarlosvillalobosfloresAún no hay calificaciones
- Marco TeoricoDocumento2 páginasMarco TeoricoÁlvaroTorrejonAún no hay calificaciones
- Trabajo FisicaDocumento18 páginasTrabajo FisicaEsteban PalaciosAún no hay calificaciones
- Practica 7 Movimiento Armónico..Documento8 páginasPractica 7 Movimiento Armónico..dani2308Aún no hay calificaciones
- Pendulo SimpleDocumento15 páginasPendulo SimplePoveda DavidAún no hay calificaciones
- Plan de recuperación física grado 11Documento10 páginasPlan de recuperación física grado 11Ruby Catherine CastelblancoAún no hay calificaciones
- Ondas y Óptica - Física y Química 1º BachDocumento33 páginasOndas y Óptica - Física y Química 1º Bacha_llaxAún no hay calificaciones
- Ley de HookeDocumento8 páginasLey de HookeAlicia MinayaAún no hay calificaciones
- Movimiento Armonico SimpleDocumento6 páginasMovimiento Armonico SimpleGregori PiñaAún no hay calificaciones
- Movimiento Armonico Simple (Informe)Documento14 páginasMovimiento Armonico Simple (Informe)SERFAST PERUAún no hay calificaciones
- FIS 102 N2Documento20 páginasFIS 102 N2josecarlosvillalobosfloresAún no hay calificaciones
- 1.1 Investigacion Oscilaciones - Gutierrez Ruiz Angel EduardoDocumento5 páginas1.1 Investigacion Oscilaciones - Gutierrez Ruiz Angel Eduardo2021348023Aún no hay calificaciones
- OndasDocumento50 páginasOndassothis2005Aún no hay calificaciones
- Obtención de La Aceleración de La Gravedad en Tacna Utilizando Un Péndulo SimpleDocumento7 páginasObtención de La Aceleración de La Gravedad en Tacna Utilizando Un Péndulo SimpleMariaFernandaTiconaAún no hay calificaciones
- Modulo 1Documento27 páginasModulo 1odrojasbAún no hay calificaciones
- Normas de seguridad para el manejo de máquinas en la Universidad Mayor de San Francisco XavierDocumento7 páginasNormas de seguridad para el manejo de máquinas en la Universidad Mayor de San Francisco Xavierjuan silvaAún no hay calificaciones
- Informe 6 FisicaDocumento15 páginasInforme 6 Fisicajuan silvaAún no hay calificaciones
- Informe 5 Fisica Lab.Documento11 páginasInforme 5 Fisica Lab.juan silvaAún no hay calificaciones
- CaratulaDocumento1 páginaCaratulajuan silvaAún no hay calificaciones
- Fis 102 1Documento9 páginasFis 102 1juan silvaAún no hay calificaciones
- Ecuaciones diferenciales de movimiento armónico y circuitos RCDocumento3 páginasEcuaciones diferenciales de movimiento armónico y circuitos RCTania Salas PimentelAún no hay calificaciones
- Ejerplos Física II-IIIDocumento1445 páginasEjerplos Física II-IIIgustavoerganstaAún no hay calificaciones
- FisicaI 3Documento20 páginasFisicaI 3Juan Ramirez Vergara0% (1)
- Problemas de presión y equilibrio de líquidos en tubos en UDocumento2 páginasProblemas de presión y equilibrio de líquidos en tubos en UGabriel Alejandro AvalosAún no hay calificaciones
- 2do Laboratorio de Física III de AnaDocumento12 páginas2do Laboratorio de Física III de AnaMari MaribelAún no hay calificaciones
- Deber CinematicaDocumento11 páginasDeber CinematicaReinaldo Andrei SalazarAún no hay calificaciones
- Problemas 30-34Documento7 páginasProblemas 30-34Estefano ParedesAún no hay calificaciones
- Practica 6 El Aire Como Gas Ideal AvanceDocumento4 páginasPractica 6 El Aire Como Gas Ideal AvanceFabian ruiz sanchezAún no hay calificaciones
- Ensayo Dielectrico Pertiga - Alex ChapalDocumento3 páginasEnsayo Dielectrico Pertiga - Alex ChapalALEXAún no hay calificaciones
- 1.2.1 Características de Elementos Pasivos.Documento7 páginas1.2.1 Características de Elementos Pasivos.Juvenal RasgadoAún no hay calificaciones
- Solución - Ejercicios Formas de Transmision de CalorDocumento3 páginasSolución - Ejercicios Formas de Transmision de CalorAngel Huaman HerreraAún no hay calificaciones
- Guía Práctica Nº10Documento2 páginasGuía Práctica Nº10Eloy Ɗavid Aliaga CamarenaAún no hay calificaciones
- Primera Ley de La Termodinamica 3ra EDICION PDFDocumento59 páginasPrimera Ley de La Termodinamica 3ra EDICION PDFCristian JohnnyAún no hay calificaciones
- Medición de voltajes y reconocimiento de materialesDocumento10 páginasMedición de voltajes y reconocimiento de materialesMARYCARMENAún no hay calificaciones
- Historial Oxy 2007Documento23 páginasHistorial Oxy 2007caredestol2014Aún no hay calificaciones
- Monografia de Codigo de ColoresDocumento51 páginasMonografia de Codigo de ColoresJose Alvaro Aquino MamaniAún no hay calificaciones
- Modulo IIDocumento62 páginasModulo IIFernandoAún no hay calificaciones
- Informe de Laboratorio Dilatación TermicaDocumento5 páginasInforme de Laboratorio Dilatación TermicaOscar Andrade100% (1)
- Materiales Informe Lab 3Documento6 páginasMateriales Informe Lab 3Gabriela ParadaAún no hay calificaciones
- Documento Sin TítuloDocumento4 páginasDocumento Sin TítuloJose Luis Blanco PiconAún no hay calificaciones
- Electroquímica 2Documento39 páginasElectroquímica 2Juan Rogelio Tena GarcíaAún no hay calificaciones
- Práctica de Laboratorio No. 6 - VirtualDocumento9 páginasPráctica de Laboratorio No. 6 - VirtualJuan Andres Garcia FernandezAún no hay calificaciones
- Modulo IV 2do Ejercicio FinalDocumento5 páginasModulo IV 2do Ejercicio FinalJulio PerdomoAún no hay calificaciones
- Balanceo de ecuaciones y Ley de Avogadro: aprendizaje sobre conservación de masa y número de moléculasDocumento8 páginasBalanceo de ecuaciones y Ley de Avogadro: aprendizaje sobre conservación de masa y número de moléculasKaren VargasAún no hay calificaciones