Documentos de Académico
Documentos de Profesional
Documentos de Cultura
Robotica y Aplicaciones
Cargado por
Alberto De la CruzTítulo original
Derechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
Robotica y Aplicaciones
Cargado por
Alberto De la CruzCopyright:
Formatos disponibles
Robtica y Aplicaciones
Indice 1. Introduccin 2. La Robtica 3. Robtica y automatizacin 4. Robtica Industrial 5. Anlisis de la necesidad de un robot 1. Introduccin A modo de introduccin, debemos hacer referencia al origen de la palabra Robot, si bien desde la antigedad se conocen ingenios mecnicos con formas ms o menos humanas cuyo propsito fue proveer diversin en las cortes o llamar la atencin de la gente, estos ingenios carecen de importancia desde el punto de vista tecnolgico, precisamente por su destino. El trmino Robot fue acuado por el escritor checoslovaco Karel Kapek, fallecido en 1938, que adquiri fama mundial con su obra R.U.R en la que presenta al obrero moderno como un esclavo mecnico, es all donde justamente emplea la palabra Robot, tomada del eslavo Robota, que significa trabajo. Es este aspecto que s nos interesa y sobre el cual haremos algunas consideraciones. Norber Winer, matemtico norteamericano, que introdujo el trmino ciberntica y su teora, refirindose al mismo tema, expres: "Es una degradacin para un ser humano encadenarlo a un remo y usarlo como fuente de energa; pero es casi igual degradacin asignarle tareas puramente repetitivas en una fbrica, que exigen menos de una millonsima de su poder cerebral". Es ms sencillo organizar una fbrica que utiliza individualidades humanas aprovechando slo una fraccin trivial de su vala, que preparar un mundo en el que estos puedan alcanzar su plena dimensin. La aplicacin del Taylorismo ha trado como consecuencia no slo condiciones particulares de consumo y cultura, sino tambin resulta ser el responsable de la creacin de condiciones de trabajo repetitivas, montonas, alienantes y degradantes para quien las efecta. No son pocos los intentos que se efectan con el nimo de modificar las condiciones de trabajo comentadas, estos intentos que describiremos rpidamente y que reciben denominaciones tan atractivas como: "Rotacin del trabajo" (Job-rotation) o "Ensanchamiento del trabajo" (Jobenlargement) consisten por ejemplo en que los trabajadores Jos, Pedro y Juan cumplan alternativamente los trabajos repetitivos X, Y y Z. Como podemos comprender se trata de una solucin falsa, en la que operarios cumplen una serie de operaciones repetitivas, al final de las cuales debern comenzar nuevamente. El "Trabajo enriquecido" (job-enrichement) agrega a la rotacin ya descrita la ejecucin de tareas no repetitivas, como por ejemplo el mantenimiento. Un ejemplo de este sistema en el que se han puesto grandes esperanzas, lo constituyeron las islas de montaje en la industria automotriz Sueca.
Los resultados obtenidos hasta el presente no justifican las expectativas iniciales. Hasta el momento slo la Robotizacin del trabajo o Robtica aparece como el medio capaz de superar al Taylorismo mediante una revalorizacin de su filosofa, cuya racionalidad consiste en haber parcializado el trabajo, pero su irracionalidad se manifiesta en el ltimo eslabn del proceso, constituido por el empleo de un ser "inteligente" en una operacin estpida. La aplicacin de los robots se enfoca prcticamente a cualquier tarea que el ser humano pueda realizar, abrindose as el campo de investigacin para la robtica. Las principales restricciones para la investigacin de cmo realizar cierta tarea son el costo en dinero y tiempo y esto precisamente es lo que ha definido las reas de investigacin en la robtica. Debido a estas restricciones, las principales aplicaciones que se tienen actualmente son en manufactura y cuyo aumento esperado en productividad justifica la inversin. Es por ello que en nuestro trabajo nos centraremos en el estudio de la robtica industrial, principalmente. 2. La Robtica La robtica es una rea interdisciplinaria formada por la ingeniera mecnica, elctrica, electrnica y sistemas computacionales. La mecnica comprende tres aspectos: diseo mecnico de la mquina, anlisis esttico y anlisis dinmico. La microelectrnica le permite al robot trasmitir la informacin que se le entrega, coordinando impulsos elctricos que hacen que el robot realice los movimientos requeridos por la tarea. La informtica provee de los programas necesarios para lograr la coordinacin mecnica requerida en los movimientos del robot, dar un cierto grado de inteligencia a la mquina, es decir adaptabilidad, autonoma y capacidad interpretativa y correctiva. El trmino de robtica inteligente combina cierta destreza fsica de locomocin y manipulacin, que caracteriza a lo que conocemos como robot, con habilidades de percepcin y de razonamiento residentes en una computadora. La locomocin y manipulacin estn directamente relacionadas con los componentes mecnicos de un robot. La percepcin est directamente relacionada con dispositivos que proporcionan informacin del medio ambiente (sensores); estos dispositivos pueden ser de tipo ultrasonido (radares), cmaras de visin, lseres, infrarrojos, por mencionar algunos. Los procesos de razonamiento seleccionan las acciones que se deben tomar para realizar cierta tarea encomendada. La habilidad de razonamiento permite el acoplamiento natural entre las habilidades de percepcin y accin. La robtica en la actualidad tiene dos ramas: una que trata con ambientes preparados (industriales) y la otra que trata con ambientes no estructurados y no predecibles (submarinos, catstrofes y el espacio). En algn tiempo se pens errneamente que se necesitara de un gran desarrollo en sensado, percepcin y razonamiento an para robots industriales. Actualmente, la robtica industrial se est extendiendo en muchos pases, especialmente en Japn, debido exactamente a que se tiene disponibles el tiempo y el ambiente para preparar al robot en su tarea a realizar para practicarla y perfeccionarla, de tal forma que se pueda repetir muchas veces. El sensado se utiliza raramente para cubrir cosas ligeramente impredecibles. Sin embargo, lo del proceso anterior es suficiente dado que la planeacin y preparacin son las palabras claves en manufactura.
Los investigadores en robtica han tenido que enfocarse en ambientes no estructurados para poder justificar mucha de la investigacin en sensado y habilidad de manejo que se ha hecho en la ltima dcada. Obviamente, el hombre puede hacer muchas ms cosas que un robot, pero la pregunta contina: si la robtica lo reemplazar o no. Campos de aplicacin de la robtica. Tericamente el uso de sistemas robticos podra extenderse a casi todas las reas imaginables en donde se necesite de la ejecucin de tareas mecnicas, tareas hoy ejecutadas por el hombre o imposibles de ejecutar por l (por ej. una exploracin sobre el terreno de la superficie marciana). Se entiende, en este contexto, que tarea mecnica es toda actividad que involucra presencia fsica y movimiento por parte de su ejecutor. Pero al situarnos en el contexto real, en la prctica, nos damos cuenta de que existen factores que limitan el vuelo de nuestra imaginacin, los que mencionaremos en el siguiente punto. Algunos de los campos de aplicacin actuales de la robtica son: Investigacin - Exploracin. En donde los robots presentan la ventaja de resistir mejor los medioambientes hostiles para el ser humano. Entretenimiento. Esta industria se favorece del uso de robots para recrear situaciones ficticias o posibles, haciendo uso de los llamados "efectos especiales". Construccin. Industria en que ya se registran proyectos que incluyen el uso de robots como ejecutores de tareas de dimensionamiento, transporte, montaje, entre otras. Automatizacin Industrial. Es el ms relevante y de inters para nosotros. Corresponde al uso de robots en la industria a fin de mejorar, agilizar y aumentar la produccin en los diferentes procesos. Factores que limitan el desarrollo e implementacin de sistemas robticos. Como mencionamos anteriormente, las aplicaciones de los sistemas robticos podran ser innumerables. Pero existen dos factores, fuertes y decisivos, que inhiben el crecimiento y desarrollo de esta tecnologa. Estos a considerar son: Limitaciones econmicas. Dado que la robtica es una disciplina de avanzada y en desarrollo, los costos asociados a ella son altsimos, puesto que se necesitan recursos no slo para su construccin. Hay muchas reas de investigacin relacionadas que tambin son fuentes de costo, y hacen que en la actualidad un sistema robtico sea un producto carsimo y no masificado. Limitaciones tecnolgicas. Un campo de investigacin como la robtica est orientado a tratar de llevar a la prctica ideas que pueden haber sido concebidas hace ya mucho tiempo.
Adems del factor recursos, la concrecin de dichas ideas depender de que se hayan encontrado o desarrollado los medios tecnolgicos que la permitan. 3. Robtica y automatizacin Son disciplinas surgidas en diferentes pocas. La robtica nace en dcadas recientes para complementarse con la automatizacin, aportndole como elemento innovador cierto grado de inteligencia. En el contexto industrial, la automatizacin es como una tecnologa que est relacionada con el empleo de sistemas mecnicos, electrnicos y basados en la informtica en la operacin y control de la produccin. Este concepto, para ser actualizado, debe incluir el uso de robots. El robot industrial forma parte del progresivo desarrollo de la automatizacin industrial, favorecido notablemente por el avance de las tcnicas de control por computadora, y contribuye de manera decisiva a la automatizacin en los procesos de fabricacin de series de mediana y pequea escala. Tipos de automatizacin industrial Automatizacin fija: Se utiliza cundo el volumen de produccin es muy alto, y por lo tanto es adecuada para disear equipos especializados para procesar productos o componentes de stos con alto rendimiento y elevadas tasas de produccin. Programable. Se emplea cuando el volumen de produccin es relativamente bajo y hay una diversidad de productos a obtener. En este caso, el equipo de produccin est diseado para ser adaptable a variaciones en la configuracin del producto. Esta caracterstica de adaptabilidad se logra haciendo funcionar el equipo bajo el control de un programa de instrucciones para el producto dado. La produccin se obtiene por lotes. Flexible. Es una categora situada entre las dos anteriores. Se ha comprobado que es ms adecuada para el rango medio de produccin. Con este tipo de automatizacin pueden obtenerse simultneamente varios tipos de producto, en el mismo sistema de fabricacin. 4. Robtica Industrial Qu es el robot industrial? Se entiende por Robot Industrial a un dispositivo de maniobra destinado a ser utilizado en la industria y dotado de uno o varios brazos, fcilmente programable para cumplir operaciones diversas con varios grados de libertad y destinado a sustituir la actividad fsica del hombre en las tareas repetitivas, montonas, desagradables o peligrosas. El RIA Robot Institute of America define al Robot como "Un manipulador multifuncional reprogramable, diseado para mover materiales, partes, herramientas o dispositivos especializados a travs de movimientos variables programados para la performance de una variedad de labores" Estas definiciones indudablemente no abarcan todas las posibilidades de
aplicacin presente y futuras de los Robots y en opinin de quienes escriben, el Robot es para la produccin, lo que el computador es para el procesamiento de datos. Es decir, una nueva y revolucionaria concepcin del sistema productivo cuyos alcances recin comienzan a percibirse en los pases altamente industrializados. Realmente, los Robots no incorporan nada nuevo a la tecnologa en general, la novedad radica en la particularidad de su arquitectura y en los objetivos que se procura con los mismos. El trabajo del Robot se limita generalmente a pocos movimientos repetitivos de sus ejes, estos son casi siempre 3 para el cuerpo y 3 para la mano o puo, su radio de accin queda determinado por un sector circular en el espacio donde este alcanza a actuar. Cuando las partes o piezas a manipular son idnticas entre s y se presentan en la misma posicin, los movimientos destinados a reubicar o montar partes se efectan mediante dispositivos articulados que a menudo finalizan con pinzas. La sucesin de los movimientos se ordena en funcin del fin que se persigue, siendo fundamental la memorizacin de las secuencias correspondientes a los diversos movimientos. Puede presentarse el caso en el que las piezas o partes a ser manipuladas no se presenten en posiciones prefijadas, en este caso el robot deber poder reconocer la posicin de la pieza y actuar u orientarse para operar sobre ella en forma correcta, es decir se lo deber proveer de un sistema de control adaptativo. Si bien no existen reglas acerca de la forma que debe tener un robot industrial, la tecnologa incorporada a l est perfectamente establecida y en algunos casos esta procede de las aplicadas a las mquinas-herramientas. Los desplazamientos rectilneos y giratorios son neumticos, hidrulicos o elctricos. Como es sabido, los sistemas neumticos no proveen movimientos precisos debido a la compresibilidad del aire y en ellos deben emplearse topes positivos para el posicionamiento, lo que implica la utilizacin de dispositivos de desaceleracin. Los Robots Neumticos poseen una alta velocidad de operacin manipulando elementos de reducido peso. Los accionamientos hidrulicos proporcionan elevadas fuerzas, excelente control de la velocidad y posicionamiento exacto. En cuanto a los sistemas elctricos se utilizan motores de corriente contina o motores paso a paso. Estos dos tipos de Robots quedan reservados a la manipulacin de elementos ms pesados o los procesos de trayectorias complejas como las tareas de soldadura por punto o continua. Clasificacin de los robots industriales Una clasificacin del grado de complejidad del Robot puede establecerse de la siguiente forma: Robots de primera generacin: Dispositivos que actan como "esclavo" mecnico de un hombre, quien provee mediante su intervencin directa el control de los rganos de movimiento. Esta transmisin tiene lugar mediante servomecanismos actuados por las extremidades superiores del hombre, caso tpico manipulacin de materiales radiactivos, obtencin de muestras submarinas, etc. Robots de segunda generacin: El dispositivo acta automticamente sin intervencin humana frente a posiciones fijas en las que el trabajo ha sido preparado y ubicado de modo
adecuado ejecutando movimientos repetitivos en el tiempo, que obedecen a lgicas combinatorias, secuenciales, programadores paso a paso, neumticos o Controladores Lgicos Programables. Un aspecto muy importante est constituido por la facilidad de rpida reprogramacin que convierte a estos Robots en unidades "verstiles" cuyo campo de aplicacin no slo se encuentra en la manipulacin de materiales sino en todo los procesos de manufactura, como por ejemplo: en el estampado en fro y en caliente asistiendo a las mquinas-herramientas para la carga y descarga de piezas. En la inyeccin de termoplsticos y metales no ferrosos, en los procesos de soldadura a punto y contina en tareas de pintado y reemplazando con ventaja algunas operaciones de mquinas convencionales. Robots de tercera generacin: Son dispositivos que habiendo sido construidos para alcanzar determinados objetivos sern capaces de elegir la mejor forma de hacerlo teniendo en cuenta el ambiente que los circunda. Para obtener estos resultados es necesario que el robot posea algunas condiciones que posibiliten su interaccin con el ambiente y los objetos. Las mnimas aptitudes requeridas son: capacidad de reconocer un elemento determinado en el espacio y la capacidad de adoptar propias trayectorias para conseguir el objetivo deseado. Los mtodos de identificacin empleados hacen referencia a la imagen ptica por ser esta el lenguaje humano en la observacin de los objetos, sin embargo no puede asegurarse que la que es natural para el hombre, constituye la mejor solucin para el robot. Tipos de configuraciones para robots industriales Cuando se habla de la configuracin de un robot, se habla de la forma fsica que se le ha dado al brazo del robot. El brazo del manipulador puede presentar cuatro configuraciones clsicas: la cartesiana, la cilndrica, la polar y la angular. Configuracin cartesiana: Posee tres movimientos lineales, es decir, tiene tres grados de libertad, los cuales corresponden a los movimientos localizados en los ejes X, Y y Z. Los movimientos que realiza este robot entre un punto y otro son con base en interpolaciones lineales. Interpolacin, en este caso, significa el tipo de trayectoria que realiza el manipulador cuando se desplaza entre un punto y otro. A la trayectoria realizada en lnea recta se le conoce como interpolacin lineal y a la trayectoria hecha de acuerdo con el tipo de movimientos que tienen sus articulaciones se le llama interpolacin por articulacin.
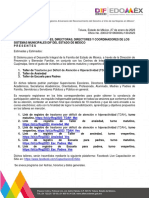
Configuracin cilndrica: Puede realizar dos movimientos lineales y uno rotacional, o sea, que presenta tres grados de libertad. El robot de configuracin cilndrica est diseado para ejecutar los movimientos conocidos como interpolacin lineal e interpolacin por articulacin.
La interpolacin por articulacin se lleva a cabo por medio de la primera articulacin, ya que sta puede realizar un movimiento rotacional. Configuracin polar: Tiene varias articulaciones. Cada una de ellas puede realizar un movimiento distinto: rotacional, angular y lineal. Este robot utiliza la interpolacin por articulacin para moverse en sus dos primeras articulaciones y la interpolacin lineal para la extensin y retraccin.
Configuracin angular (o de brazo articulado):
Presenta una articulacin con movimiento rotacional y dos angulares. Aunque el brazo articulado puede realizar el movimiento llamado interpolacin lineal (para lo cual requiere mover simultneamente dos o tres de sus articulaciones), el movimiento natural es el de interpolacin por articulacin, tanto rotacional como angular. Adems de las cuatro configuraciones clsicas mencionadas, existen otras configuraciones llamadas no clsicas. El ejemplo ms comn de una configuracin no clsica lo representa el robot tipo SCARA, cuyas siglas significan: Selective apliance arm robot for assembly. Este brazo puede realizar movimientos horizontales de mayor alcance debido a sus dos articulaciones rotacionales. El robot de configuracin SCARA tambin puede hacer un movimiento lineal (mediante su tercera articulacin).
Volumen de trabajo Para acercarnos ms al conocimiento de los robots industriales, es preciso tocar el tema que se refiere al volumen de trabajo y la precisin de movimiento. Entre las caractersticas que identifican a un robot se encuentran su volumen de trabajo y ciertos parmetros como el control de resolucin, la exactitud y la repetibilidad. El volumen de trabajo de un robot se refiere nicamente al espacio dentro del cual puede desplazarse el extremo de su mueca. Para determinar el volumen de trabajo no se toma en cuenta el efecto final. La razn de ello es que a la mueca del robot se le pueden adaptar gripers de distintos tamaos. Para ilustrar lo que se conoce como volumen de trabajo regular y volumen de trabajo irregular, tomaremos como modelos varios robots.
El robot cartesiano y el robot cilndrico presentan volmenes de trabajo regulares. El robot cartesiano genera una figura cbica.
El robot de configuracin cilndrica presenta un volumen de trabajo parecido a un cilindro (normalmente este robot no tiene una rotacin de 360)
Por su parte, los robots que poseen una configuracin polar, los de brazo articulado y los modelos SCARA presentan un volumen de trabajo irregular. Sistemas de Impulsin de los robots industriales: Los ms comunes son tres: impulsin hidrulica, impulsin elctrica e impulsin neumtica. Hidrulico. El sistema de impulsin hidrulica es en la que se utiliza un fluido, generalmente un tipo de aceite, para que el robot pueda movilizar sus mecanismos. La impulsin hidrulica se utiliza para robots grandes, los cuales presentan mayor velocidad y mayor resistencia mecnica. Elctrico. Se le da el nombre de impulsin elctrica cuando se usa la energa elctrica
para que el robot ejecute sus movimientos. La impulsin elctrica se utiliza para robots de tamao mediano, pues stos no requieren de tanta velocidad ni potencia como los robots diseados para funcionar con impulsin hidrulica. Los robots que usan la energa elctrica se caracterizan por una mayor exactitud y repetibilidad. Neumtico. Slo resta hablar de aquellos robots que se valen de la impulsin neumtica para realizar sus funciones. En la impulsin neumtica se comprime el aire abastecido por un compresor, el cual viaja a travs de mangueras. Los robots pequeos estn diseados para funcionar por medio de la impulsin neumtica. Los robots que funcionan con impulsin neumtica estn limitados a operaciones como la de tomar y situar ciertos elementos. Es importante sealar que no todos los elementos que forman el robot pueden tener el mismo tipo de impulsin. 5. Anlisis de la necesidad de un robot A continuacin se har un anlisis de la necesidad de instalacin de un robot y los aspectos a considerar en su factibilidad. Cuando la longitud total de la lnea de un proceso es lo ms corta posible y los puntos de almacenamiento son los menos posible, el propsito de instalacin de un Robot es la manipulacin de piezas no muy dismiles entre s. Para considerar la factibilidad de su instalacin debe responderse a una serie de preguntas, a saber: 1. Cul es la produccin anual de la pieza en particular o piezas? 2. Pueden estas piezas almacenarse? 3. Cul es el tiempo disponible para el manipuleo? 4. Puede un nuevo Layout de mquinas dar alojamiento al Robot? 5. Hay lugar disponible en la mquina o mquinas que intervienen en el proceso para alojar la mano del Robot y la pieza? 6. Qu dotacin de personal de operacin y supervisin ser necesaria? 7. Es la inversin posible? Produccin Anual. Cuando se deben producir piezas variadas, estas deben ser de caractersticas similares y la produccin de cada lote como mnimo debe ocupar un perodo de tiempo razonable. Almacenamiento Para la obtencin de un flujo automtico de material se deben almacenar piezas antes y despus del grupo de mquinas que sern servidas por el Robot. Las piezas pueden almacenarse en transportadores paso a paso, o en cajas de nivel regulable. Las plataformas inclinadas, alimentacin y salida por gravedad, suelen emplearse en casos sencillos. El tamao del almacn depende de la tasa de produccin. El operador que inspecciona las piezas puede llenar y vaciar las cajas de almacenamiento. Tiempo de Manipuleo El tiempo de maniobra requerido es determinado por la longitud total del
camino y la mxima velocidad del Robot. La mayora de los Robots neumticos, hidrulicos y elctricos tienen velocidades mximas aproximadas a los 0,7 metros por segundo y desplazamientos angulares de 90 por segundo. Sin embargo cuando se trata de un Robot neumtico debe tenerse presente que la variacin de velocidad con la carga es muy grande; y esto es particularmente importante cuando un Robot de este tipo est equipado con dos manos, ya que en el momento en que estas estn ocupadas la carga ser el doble. El tiempo anual de manipuleo puede ser calculado, cuando se compara el Robot con la labor total en igual perodo, pero no es posible hacerlo mediante la comparacin con el tiempo de manipulacin de una sola pieza. Layout de Mquinas Bsicamente el layout puede ser circular o lineal. En una disposicin circular un Robot sirve a varias mquinas sin que las piezas se acumulen entre ellas. En un layout lineal cada Robot sirve a una mquina en la lnea y las piezas van siendo reunidas en transportadores entre mquinas. Un transportador de almacenamiento debe ser capaz de tomar el total de la produccin de una mquina durante el cambio de herramienta. En esta disposicin la produccin es mayor que en el sistema circular. Muchos layouts requieren versiones especiales de Robots con grados de libertad adicionales demandadas por el proceso. Accesibilidad La mano del Robot est diseada generalmente para un movimiento de entrada lateral, para lo cual es necesario disponer de espacios entre la herramienta y el punto de trabajo. El brazo del Robot debe tener espacio para ingresar a la mquina en forma horizontal o vertical. Dotacin de Operacin y Supervisin La inspeccin visual de las piezas es manual en la mayora de los casos. Las cajas de almacenamiento deben ser llenadas y vaciadas. 4 o 5 Robots que demanden estas tareas adicionales pueden ser supervisados por un solo hombre. La implementacin de un Robot en un proceso productivo, tiene como objetivo fundamental disminuir los costos de produccin mediante un mejor aprovechamiento de la capacidad productiva ya instalada. Costo de Implementacin El costo de esta Implementacin est compuesto por los siguientes tems: o El Robot. o Las herramientas de la mano. o Posible modificacin de la mquina o mquina-herramienta y herramientas. o Posible alteracin del layout existente. o Equipos perifricos, transportadores, cajas de almacenamiento. o Dispositivos de fijacin y sealizacin. o Costo del trabajo de instalacin. o Entrenamiento del personal para operacin y mantenimiento. o Puesta en marcha y puesta a punto.
Beneficios Los beneficios que se obtienen al implementar un robot de este tipo son: o o o o o o o o o o Reduccin de la labor. Incremento de utilizacin de las mquinas. Flexibilidad productiva. Mejoramiento de la calidad. Disminucin de pasos en el proceso de produccin. Mejoramiento de las condiciones de trabajo, reduccin de riesgos personales. Mayor productividad. Ahorro de materia prima y energa. Flexibilidad total. Calidad de trabajo humano:
-Seguridad: trabajos peligrosos e insalubres. -Comodidad: trabajos repetitivos, montonos y en posiciones forzadas. o Acumulacin instantnea de experiencias.
También podría gustarte
- Cuadros ComparativosDocumento3 páginasCuadros ComparativosDanny DiazAún no hay calificaciones
- Invitación General de Talleres - 1 de Febrero Del 2023Documento4 páginasInvitación General de Talleres - 1 de Febrero Del 2023Aguilar Palacios Odalis VanesaAún no hay calificaciones
- Rubrica LiderazgoDocumento1 páginaRubrica LiderazgoAdriel MezaAún no hay calificaciones
- DCG-1205 Plan de MarketingDocumento6 páginasDCG-1205 Plan de MarketingBere Gómez MartinezAún no hay calificaciones
- Impacto AmbientalDocumento142 páginasImpacto AmbientalChristian Almaraz Gamez100% (1)
- La Etica Como Pilar de La Responsabilidad Social Del Perito Contable - Cpc. Carlos Pastor CarrascDocumento60 páginasLa Etica Como Pilar de La Responsabilidad Social Del Perito Contable - Cpc. Carlos Pastor CarrascCornelia Isuiza AmasifuenAún no hay calificaciones
- Mural ReciclajeDocumento27 páginasMural ReciclajeCesarColquehuancaAún no hay calificaciones
- DERECHO ADMINISTRATIVO - Principio de Legalidad y Potestades AdministrativasDocumento8 páginasDERECHO ADMINISTRATIVO - Principio de Legalidad y Potestades AdministrativasivanluisdiazAún no hay calificaciones
- Probabilidad Examen FinalDocumento9 páginasProbabilidad Examen FinalCarlosAntonioSanchezAriasAún no hay calificaciones
- Evalua 4Documento89 páginasEvalua 4Nelly Viviana López Jaña82% (11)
- Fornet Betancourt - Interculturalidad o Barbarie (Articulo)Documento15 páginasFornet Betancourt - Interculturalidad o Barbarie (Articulo)MinBsbAún no hay calificaciones
- Plan - Mejora Continua - IespphDocumento5 páginasPlan - Mejora Continua - IespphValentin Esteban ValladolidAún no hay calificaciones
- Proyecto de EtimologiaDocumento5 páginasProyecto de EtimologiaEldien Leobardo DNohAún no hay calificaciones
- Integracion HorizontalDocumento50 páginasIntegracion HorizontalRuben Valdivieso0% (1)
- Aire Comprimido para Una Planta IndustrialDocumento8 páginasAire Comprimido para Una Planta IndustrialVerónica GAún no hay calificaciones
- Muest ReoDocumento2 páginasMuest ReoIrene IranzoAún no hay calificaciones
- Sandra Buechler ArticuloDocumento4 páginasSandra Buechler ArticuloPsicólogo Alberto BelmonteAún no hay calificaciones
- Pueblos Del Bajo UrubambaDocumento50 páginasPueblos Del Bajo UrubambaBrian Eno100% (1)
- La Sangre de Las OtrasDocumento125 páginasLa Sangre de Las Otrascronopio13100% (1)
- 01 Terminos de Referencia Aito Lomas de Baquedano 3Documento8 páginas01 Terminos de Referencia Aito Lomas de Baquedano 3Carlos RivasAún no hay calificaciones
- Experiencia de LaboratoriocaídalibreDocumento6 páginasExperiencia de LaboratoriocaídalibreEkke PlannerAún no hay calificaciones
- Puentes AtirantadosDocumento12 páginasPuentes AtirantadosGonzalo AlcazarAún no hay calificaciones
- Silabus Metodos EstadisticosDocumento5 páginasSilabus Metodos EstadisticosAnthony Zevallos GuzmanAún no hay calificaciones
- Historia Primero MedioDocumento6 páginasHistoria Primero MedioConstanza De La Torre VillagránAún no hay calificaciones
- John B. WatsonDocumento3 páginasJohn B. WatsonRoberto BallesterosAún no hay calificaciones
- Examen Final - Semana 8 - Segundo Bloque-Teorico - Fundamentos de Psicologia - (Grupo6)Documento10 páginasExamen Final - Semana 8 - Segundo Bloque-Teorico - Fundamentos de Psicologia - (Grupo6)Nicole Sierra33% (3)
- Temple Con LaserDocumento2 páginasTemple Con Laserpatricio-1703Aún no hay calificaciones
- Decreto 3395 - 96 de La Ley 5965Documento35 páginasDecreto 3395 - 96 de La Ley 5965Pablo Leonel RodriguezAún no hay calificaciones
- Act - para La Secuencia - EvaluacionDocumento8 páginasAct - para La Secuencia - EvaluacionWandy JassoAún no hay calificaciones
- Criterios de Inspección de Pintura INMENSADocumento4 páginasCriterios de Inspección de Pintura INMENSAANTONIO MARTINEZAún no hay calificaciones