También podría gustarte
- 1 Asociaci On, Predicci On y Estimaci On: Modelos Estad Isticos LinealesDocumento18 páginas1 Asociaci On, Predicci On y Estimaci On: Modelos Estad Isticos LinealesCRISTIAN GARCIA BERMUDEZAún no hay calificaciones
- Eyp2425 2015ABCDocumento30 páginasEyp2425 2015ABCCRISTIAN GARCIA BERMUDEZAún no hay calificaciones
- GMLDiapo 01Documento50 páginasGMLDiapo 01Mariella Tognarelli Buono-CoreAún no hay calificaciones
- Ayudantía 3 (Enunciado)Documento8 páginasAyudantía 3 (Enunciado)Rodrigo VillenaAún no hay calificaciones
- Texto3 EstDescDocumento17 páginasTexto3 EstDescGustavo Manosalva HornaAún no hay calificaciones
- Clase 2Documento28 páginasClase 2Renzo Zagarra SaezAún no hay calificaciones
- Límite MatemáticoDocumento4 páginasLímite Matemáticoatabeg7Aún no hay calificaciones
- Capítulo 1 - CuánticaDocumento23 páginasCapítulo 1 - CuánticaChris QCAún no hay calificaciones
- Componenentes Principales PDFDocumento42 páginasComponenentes Principales PDFFernando GómezAún no hay calificaciones
- INFORME1Documento8 páginasINFORME1Joselyn Viviana Guillen NogalesAún no hay calificaciones
- Regresion y Correlacion - Teoria - ApuntesDocumento19 páginasRegresion y Correlacion - Teoria - ApuntesKarla Lorelei Hernández NájeraAún no hay calificaciones
- Practica de Computo CientificoDocumento5 páginasPractica de Computo CientificoYadhyra Itzel EstradaAún no hay calificaciones
- Probabilidad de Variable ContinuaDocumento17 páginasProbabilidad de Variable ContinuaJg RamirezAún no hay calificaciones
- Sem 2 GraficasDocumento7 páginasSem 2 GraficasLeonardo LujanAún no hay calificaciones
- Analisis RegresionDocumento127 páginasAnalisis Regresionehgo1319Aún no hay calificaciones
- Variable Aleatoria ContinuaDocumento38 páginasVariable Aleatoria ContinuaAxlBassi100% (1)
- Desigualdades ApuntesDocumento11 páginasDesigualdades ApuntesAndrew LizCarAún no hay calificaciones
- Proyecto RLS y RLMDocumento13 páginasProyecto RLS y RLMJose David Medina MonterrozaAún no hay calificaciones
- Integración Por Monte CarloDocumento22 páginasIntegración Por Monte CarloJobs29Aún no hay calificaciones
- FUNCIONESDocumento40 páginasFUNCIONESRafaél J MalaveAún no hay calificaciones
- FULL ModelosDocumento179 páginasFULL ModelosapuntesjmznAún no hay calificaciones
- HeterocedasticidadDocumento28 páginasHeterocedasticidadVictoria MassonAún no hay calificaciones
- ClaseDIstNorm EstadisticaDocumento7 páginasClaseDIstNorm Estadisticacarmen muñoz piñaleoAún no hay calificaciones
- M To Do Spar Aob Tenere Stim AdoresDocumento43 páginasM To Do Spar Aob Tenere Stim AdoresGerman Galdamez OvandoAún no hay calificaciones
- REGRESIONDocumento111 páginasREGRESIONMaria Castro GamarraAún no hay calificaciones
- Guia Practica 2 Analisis GraficoDocumento3 páginasGuia Practica 2 Analisis GraficoSantiago Rodriguez MoralesAún no hay calificaciones
- EnsayoDocumento18 páginasEnsayoomaxvetAún no hay calificaciones
- T3 VariablesAleatoriasDocumento14 páginasT3 VariablesAleatoriaslauraAún no hay calificaciones
- Casa Da SeraDocumento15 páginasCasa Da SeraCesar MusoAún no hay calificaciones
- C5 SlogDocumento12 páginasC5 SlogLuisCalderónAún no hay calificaciones
- Tecnicas Multivariantes Parte1 Twiggy Guerrero PDFDocumento12 páginasTecnicas Multivariantes Parte1 Twiggy Guerrero PDFDomenico ZuzoloAún no hay calificaciones
- Edp Segundo Orden y ElípticasDocumento17 páginasEdp Segundo Orden y ElípticasFulvio JoséAún no hay calificaciones
- Libro Spivak PDFDocumento29 páginasLibro Spivak PDFDaniel Herrera AstudilloAún no hay calificaciones
- Laboratorio #8Documento5 páginasLaboratorio #8angel nuñezAún no hay calificaciones
- Capitulo 3 - Problemas en 1D - Curso - ProblemasDocumento68 páginasCapitulo 3 - Problemas en 1D - Curso - ProblemasgermanAún no hay calificaciones
- S12.s1 - APLI - DIST - PROBDocumento20 páginasS12.s1 - APLI - DIST - PROBAngela Pamela CHIROQUE SosaAún no hay calificaciones
- 21 IdeadelimitesDocumento4 páginas21 IdeadelimitesNicol Almendra Mirano SalcedoAún no hay calificaciones
- Simulacion Matematica EspolDocumento62 páginasSimulacion Matematica EspolRon Rc100% (1)
- Diferencias Finitas y Volúmenes Finitos para TermofluidosDocumento22 páginasDiferencias Finitas y Volúmenes Finitos para TermofluidosTraversAún no hay calificaciones
- Estadistica BayesianaDocumento42 páginasEstadistica Bayesianapaomar27Aún no hay calificaciones
- Tema 3 ESPDocumento9 páginasTema 3 ESPSantiago JimenezAún no hay calificaciones
- TPN°1 FuncionesyLimite2023-finalDocumento15 páginasTPN°1 FuncionesyLimite2023-finalGab RuecknerAún no hay calificaciones
- Probabilidad e IntegracionDocumento9 páginasProbabilidad e IntegracionAndrea Bustamante InoñanAún no hay calificaciones
- TEORIAMPF2022 Clases1y2Documento21 páginasTEORIAMPF2022 Clases1y2JoaquÍn SaldañoAún no hay calificaciones
- Particula en Una CajaDocumento10 páginasParticula en Una CajaLzm LfoAún no hay calificaciones
- Introduccion A La EstadisticaDocumento9 páginasIntroduccion A La EstadisticagomalapidolucianoAún no hay calificaciones
- STD 408 BisDocumento7 páginasSTD 408 BisAlejandro Jose Luis PuceiroAún no hay calificaciones
- Apunte N°4. Límite de Una FunciónDocumento10 páginasApunte N°4. Límite de Una FunciónBenito antonio martinezAún no hay calificaciones
- Unidad 2 InferencialDocumento6 páginasUnidad 2 InferencialJuan SolisAún no hay calificaciones
- Unidad 4 Variable ContinuaDocumento4 páginasUnidad 4 Variable ContinuaGonza UrcolaAún no hay calificaciones
- Introducción A Los Modelos de RegresiónDocumento28 páginasIntroducción A Los Modelos de RegresiónJESUS DAVID GUTIERREZ SANCHEZAún no hay calificaciones
- Variable Aleatoria ContinuaDocumento9 páginasVariable Aleatoria ContinuaHugo Hugo CarvajalAún no hay calificaciones
- Trabajo de Miguel TeranDocumento16 páginasTrabajo de Miguel TeranYonaikerAún no hay calificaciones
- TBL Articulos - Pdf2.b12c812b1877d8a3.373330322e706466Documento9 páginasTBL Articulos - Pdf2.b12c812b1877d8a3.373330322e706466Maria HernándezAún no hay calificaciones
- Secme 21239Documento9 páginasSecme 21239Jordan Gaibor MaciasAún no hay calificaciones
- Variables Aleatorias Exponencial y NormalDocumento17 páginasVariables Aleatorias Exponencial y Normalclaudiasierraramos03Aún no hay calificaciones
- 2 Estadística II - Capítulo 2 - v2Documento10 páginas2 Estadística II - Capítulo 2 - v2estefaniaAún no hay calificaciones
- Clases t2Documento50 páginasClases t2EgbertoGismontiAún no hay calificaciones
- Mat 14 Master0809multi-Tema2Documento23 páginasMat 14 Master0809multi-Tema2Luis CaceresAún no hay calificaciones
- PautaI3 2106 1 2016Documento6 páginasPautaI3 2106 1 2016CRISTIAN GARCIA BERMUDEZAún no hay calificaciones
- SolucinPendiente EYP2114Ayu1Documento4 páginasSolucinPendiente EYP2114Ayu1CRISTIAN GARCIA BERMUDEZAún no hay calificaciones
- Bases Matem Aticas para Modelos Estad Isticos Lineales: Guido Del Pino MDocumento13 páginasBases Matem Aticas para Modelos Estad Isticos Lineales: Guido Del Pino MCRISTIAN GARCIA BERMUDEZAún no hay calificaciones
- MultifactorialDocumento9 páginasMultifactorialCRISTIAN GARCIA BERMUDEZAún no hay calificaciones
- Fundamentos Matem Aticos de Los Modelos Estad Isticos LinealesDocumento14 páginasFundamentos Matem Aticos de Los Modelos Estad Isticos LinealesCRISTIAN GARCIA BERMUDEZAún no hay calificaciones
- Ole Ay Jimenez To MoiDocumento119 páginasOle Ay Jimenez To MoiCRISTIAN GARCIA BERMUDEZAún no hay calificaciones
- Modulo 2 UltrasonidosDocumento82 páginasModulo 2 UltrasonidoserwincalvoAún no hay calificaciones
- BuretaDocumento3 páginasBuretaLeidy BarajasAún no hay calificaciones
- 1 MEMORIA DESCRIPTIVA - Castrillejo - Rev DDocumento90 páginas1 MEMORIA DESCRIPTIVA - Castrillejo - Rev DOrlando ValverdeAún no hay calificaciones
- Manual Rodillo Compactador Series Ca250 DynapacDocumento70 páginasManual Rodillo Compactador Series Ca250 DynapacCarlos80% (10)
- Curso Tren Fuerza Finning CaterpillarDocumento89 páginasCurso Tren Fuerza Finning Caterpillarivanesco34100% (3)
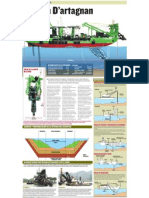
- Draga D ArtagnanDocumento1 páginaDraga D ArtagnanNoel PalaciosAún no hay calificaciones
- PRÁCTICA-5-Gasto A Traves de Un OrificioDocumento10 páginasPRÁCTICA-5-Gasto A Traves de Un OrificioDanilo Toledo50% (2)
- EXT JmAwZ6hoLyAYd8yu2plHDocumento4 páginasEXT JmAwZ6hoLyAYd8yu2plHalettristeAún no hay calificaciones
- 2-Estatica de FluidosDocumento32 páginas2-Estatica de FluidosBelary MayorgaAún no hay calificaciones
- Biologia OriginalDocumento15 páginasBiologia OriginalAngie Corcho100% (1)
- ApdDocumento13 páginasApdmary94feAún no hay calificaciones
- Informe Sifones y Golpe de ArieteDocumento41 páginasInforme Sifones y Golpe de Arietedeily araceli mejia silva50% (2)
- Trabajo Calculo Vectoral PDFDocumento7 páginasTrabajo Calculo Vectoral PDFLUIS HERNANDEZ VICENTEAún no hay calificaciones
- Respiración AerobiaDocumento18 páginasRespiración AerobiaAby RosalesAún no hay calificaciones
- Ley de Los GasesDocumento7 páginasLey de Los Gasesjulio camposAún no hay calificaciones
- Guía Didáctica de Cinemática Del Movimiento CircularDocumento7 páginasGuía Didáctica de Cinemática Del Movimiento CircularHumberto LópezAún no hay calificaciones
- Deposito de Relaves en MineriaDocumento28 páginasDeposito de Relaves en MineriaLars AstoAún no hay calificaciones
- Vector Binormal Unitario ACTIVIDAD 7Documento6 páginasVector Binormal Unitario ACTIVIDAD 7luispdzp100% (2)
- Cómo Es El Balance Dinámico de La Circulación en El Área Natural Protegida Los Cóbanos El SalvadorDocumento20 páginasCómo Es El Balance Dinámico de La Circulación en El Área Natural Protegida Los Cóbanos El SalvadorSalvador PeraltaAún no hay calificaciones
- Expediente-Tecnico-Vivienda-multifamiliar - en Habilitaciones Urbanas - Instalaciones-ElectricasDocumento20 páginasExpediente-Tecnico-Vivienda-multifamiliar - en Habilitaciones Urbanas - Instalaciones-ElectricasMiguel Alberto AlejosAún no hay calificaciones
- Diseño de Estanque AmortiguadorDocumento11 páginasDiseño de Estanque AmortiguadorCAMEVA100% (1)
- Javier FP uni2-IP4ToDocumento4 páginasJavier FP uni2-IP4ToJose Javier Geronimo CejaAún no hay calificaciones
- Resumen de RefrigeraciónDocumento5 páginasResumen de RefrigeraciónMaria Jesús Atencia Batista100% (2)
- 7 20-7-2015 Evaluación de Matemática 4to OkDocumento6 páginas7 20-7-2015 Evaluación de Matemática 4to OkStefany ValverdeAún no hay calificaciones
- Nuestra Ascensión de La Tierra 3D A La 5DDocumento6 páginasNuestra Ascensión de La Tierra 3D A La 5DVictoriaAún no hay calificaciones
- Geometría-Ejercicios ResueltosDocumento75 páginasGeometría-Ejercicios ResueltosJoseFuri100% (2)
- ECUASIONESDocumento5 páginasECUASIONESGabuNenitaIdroboAún no hay calificaciones
- Camara Rompe PresionDocumento7 páginasCamara Rompe Presionosvaldo churataAún no hay calificaciones
- 3 Lapso Arte y PatrimonioDocumento6 páginas3 Lapso Arte y PatrimonioRuth Mendoza PradaAún no hay calificaciones