También podría gustarte
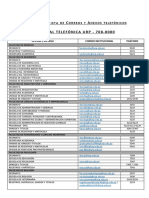
- Anexo 03 Lista de Correos y Anexos Telefonicos 07-04-2021Documento2 páginasAnexo 03 Lista de Correos y Anexos Telefonicos 07-04-2021Eder Rodas RAún no hay calificaciones
- Interferencia ElectromagnéticaDocumento3 páginasInterferencia ElectromagnéticaEder Rodas RAún no hay calificaciones
- Radiación UltravioletaDocumento16 páginasRadiación UltravioletaEder Rodas RAún no hay calificaciones
- Radiación TérmicaDocumento4 páginasRadiación TérmicaEder Rodas RAún no hay calificaciones
- EspectrofotometríaDocumento4 páginasEspectrofotometríaEder Rodas RAún no hay calificaciones
- Permeabilidad MagnéticaDocumento2 páginasPermeabilidad MagnéticaEder Rodas RAún no hay calificaciones
- EspejoDocumento6 páginasEspejoMaestro TaumaturgoAún no hay calificaciones
- CuaterniónDocumento10 páginasCuaterniónDavid MurilloAún no hay calificaciones
- Período de OscilaciónDocumento4 páginasPeríodo de OscilaciónEder Rodas RAún no hay calificaciones
- Cálculo VectorialDocumento9 páginasCálculo VectorialDavid MurilloAún no hay calificaciones
- Radiación ElectromagnéticaDocumento10 páginasRadiación ElectromagnéticaRoso ArguelloAún no hay calificaciones
- Frecuencia Extremadamente AltaDocumento1 páginaFrecuencia Extremadamente AltaEder Rodas RAún no hay calificaciones
- FotografíaDocumento19 páginasFotografíaEder Rodas RAún no hay calificaciones
- Universidad de PrincetonDocumento15 páginasUniversidad de PrincetonEder Rodas RAún no hay calificaciones
- KlistrónDocumento2 páginasKlistrónEder Rodas RAún no hay calificaciones
- HeidelbergDocumento11 páginasHeidelbergEder Rodas RAún no hay calificaciones
- Diodo IMPATTDocumento1 páginaDiodo IMPATTEder Rodas RAún no hay calificaciones
- MagnetrónDocumento6 páginasMagnetrónEder Rodas RAún no hay calificaciones
- Conductividad Eléctrica PDFDocumento7 páginasConductividad Eléctrica PDFSantiago AristizábalAún no hay calificaciones
- Transistor de Efecto CampoDocumento4 páginasTransistor de Efecto CampoEder Rodas RAún no hay calificaciones
- Diodo GunnDocumento3 páginasDiodo GunnEder Rodas RAún no hay calificaciones
- CompresibilidadDocumento3 páginasCompresibilidadEder Rodas RAún no hay calificaciones
- KelvinDocumento5 páginasKelvinEder Rodas RAún no hay calificaciones
- TemperaturaDocumento9 páginasTemperaturaEder Rodas RAún no hay calificaciones
- Energía InternaDocumento5 páginasEnergía InternaAdriana I'hAún no hay calificaciones
- Sistema Internacional de UnidadesDocumento7 páginasSistema Internacional de UnidadesEder Rodas RAún no hay calificaciones
- Volumen EspecíficoDocumento1 páginaVolumen EspecíficoEder Rodas RAún no hay calificaciones
- Heike Kamerlingh OnnesDocumento3 páginasHeike Kamerlingh OnnesEder Rodas RAún no hay calificaciones
- Émile ClapeyronDocumento3 páginasÉmile ClapeyronEder Rodas RAún no hay calificaciones
- Informe #4 Conservas de PescadoDocumento7 páginasInforme #4 Conservas de PescadoVanessa Alvarez Murgueytio100% (2)
- Plasticos Y Materiales CompuestosDocumento19 páginasPlasticos Y Materiales CompuestosTomás Giles RaghnerAún no hay calificaciones
- Radio-Imagen Grupo 4Documento14 páginasRadio-Imagen Grupo 4Fanny Lucia Ayala CordobaAún no hay calificaciones
- Cotiz. ACUMULADORES 00161 - 2022 SIGNIA LURIN - Bateria 36 VDC 972 AH - NUEVA EXIDEDocumento2 páginasCotiz. ACUMULADORES 00161 - 2022 SIGNIA LURIN - Bateria 36 VDC 972 AH - NUEVA EXIDERAUL GONSALESAún no hay calificaciones
- Texto Didactizado Medidas y MagnitudesDocumento20 páginasTexto Didactizado Medidas y Magnitudeswilliam mancillaAún no hay calificaciones
- Lab FQ UVDocumento55 páginasLab FQ UVKarina HernándezAún no hay calificaciones
- PC2 Mecanica de FluidosDocumento11 páginasPC2 Mecanica de FluidosYaneli Lina Crispin GalindoAún no hay calificaciones
- Curso velas artesanales paso paso materialesDocumento23 páginasCurso velas artesanales paso paso materialesCenith MartinezAún no hay calificaciones
- Máquinas TérmicasDocumento2 páginasMáquinas TérmicasCristian MayaAún no hay calificaciones
- Estudio de Mecanica de SuelosDocumento15 páginasEstudio de Mecanica de SuelosMattias Otero BlessAún no hay calificaciones
- Resultado de Aprendizaje Unidad 2 MatematicasDocumento8 páginasResultado de Aprendizaje Unidad 2 Matematicasmario alberto vasquez ramirezAún no hay calificaciones
- DESARROLLO SOSTENIBLE E IMPORTANCIA DEL FACTOR AMBIENTAL - Luis EspinozaDocumento63 páginasDESARROLLO SOSTENIBLE E IMPORTANCIA DEL FACTOR AMBIENTAL - Luis EspinozaGabriela Arrieta VelaAún no hay calificaciones
- Propiedades físicas de los elementosDocumento7 páginasPropiedades físicas de los elementosnat stylesAún no hay calificaciones
- Cálculo de hielo y agua para enfriar pollos en un chillerDocumento4 páginasCálculo de hielo y agua para enfriar pollos en un chillerJaime Santisteban BancesAún no hay calificaciones
- POLIEDROSDocumento11 páginasPOLIEDROSPAUL EXON CHIRINOS JURADOAún no hay calificaciones
- Tomografo Computarizado de 16 CortesDocumento90 páginasTomografo Computarizado de 16 CortesJulio HurtadoAún no hay calificaciones
- Ley de Biot-Savart: campo magnético de corrientesDocumento4 páginasLey de Biot-Savart: campo magnético de corrientesJose Luis BrunelliAún no hay calificaciones
- Derecho AmbientalDocumento26 páginasDerecho AmbientalALUMNO ERICK SAÚL MARTÍNEZ COLLAZOAún no hay calificaciones
- Competencias-Capacidades-Desempeños CyTDocumento15 páginasCompetencias-Capacidades-Desempeños CyTMARCELO ESPINOZAAún no hay calificaciones
- S-3-Taller Grupal-Sem 3Documento5 páginasS-3-Taller Grupal-Sem 3Raul Pessagno QAún no hay calificaciones
- Lab. 4 Transistores JFET C4ADocumento17 páginasLab. 4 Transistores JFET C4Afamilia pelucheAún no hay calificaciones
- Guia de Laboratorio ML-202 UNI-FIMDocumento47 páginasGuia de Laboratorio ML-202 UNI-FIMLuis Ángel Vilcamiche FernándezAún no hay calificaciones
- Placa BaseDocumento2 páginasPlaca Basesulsy sally maque mamaniAún no hay calificaciones
- Modelo Atómico de BohrDocumento2 páginasModelo Atómico de BohrJulio César Reyes Díaz100% (1)
- Ensayo 5 Salto HidraulicoDocumento15 páginasEnsayo 5 Salto HidraulicoDiego Armando Villca TolaAún no hay calificaciones
- Memoria de Calculo Boxcoulvert 1X1X5MTS Parcelas El Brillante-Guaranda.Documento24 páginasMemoria de Calculo Boxcoulvert 1X1X5MTS Parcelas El Brillante-Guaranda.Alvaro Manuel Ruiz CardonaAún no hay calificaciones
- InformeTecnicoLegalNro0420 2014 GARTDocumento65 páginasInformeTecnicoLegalNro0420 2014 GARTRICARDO ERNESTO ANTONIO VARGAS ZAPATAAún no hay calificaciones
- Radicales AcidosDocumento2 páginasRadicales AcidosMercedes Elena Asenjo SosaAún no hay calificaciones
- Reporte Laboratorio 2. Ley de Ohm PDFDocumento2 páginasReporte Laboratorio 2. Ley de Ohm PDFDaniel Hidalgo ValenciaAún no hay calificaciones
- CC - cvp-RG-01 Analisis Granulométrico Por Tamizado Suelos Vs 01Documento1 páginaCC - cvp-RG-01 Analisis Granulométrico Por Tamizado Suelos Vs 01jorge floresAún no hay calificaciones