También podría gustarte
- Sesion N°02-Vib Armónica y Resonancia PDFDocumento26 páginasSesion N°02-Vib Armónica y Resonancia PDFPiero Del JuliánAún no hay calificaciones
- Sesion N03 Vib Armónica y ResonanciaDocumento27 páginasSesion N03 Vib Armónica y ResonanciaGonzalo GarciaAún no hay calificaciones
- Sesion 02 - Vib ArmonicaDocumento23 páginasSesion 02 - Vib ArmonicamercyAún no hay calificaciones
- Sesion N°02-Vib Armónica y ResonanciaDocumento26 páginasSesion N°02-Vib Armónica y ResonanciaPiero Del JuliánAún no hay calificaciones
- Sesion N02 Vib Libre Con AmortigDocumento13 páginasSesion N02 Vib Libre Con AmortigGonzalo GarciaAún no hay calificaciones
- Apuntes ResMatDocumento6 páginasApuntes ResMatMartin MespoAún no hay calificaciones
- 4.1.1 Movimiento Libre No Amortiguado (Definición)Documento3 páginas4.1.1 Movimiento Libre No Amortiguado (Definición)Cindy GaticaAún no hay calificaciones
- Formulario Fisica AppolDocumento1 páginaFormulario Fisica AppolMartin Oswaldo Dominguez RiveraAún no hay calificaciones
- ElasticidadDocumento15 páginasElasticidadWalter Pacheco ChapoñanAún no hay calificaciones
- FormulaRio MaquinasDocumento2 páginasFormulaRio MaquinasAntonio PlAún no hay calificaciones
- Formulario Física/ElectromagnetismoDocumento2 páginasFormulario Física/ElectromagnetismoAlejandro TeveraAún no hay calificaciones
- Formulario Fisica IsaccDocumento1 páginaFormulario Fisica Isaccanthoni cajamarcaAún no hay calificaciones
- CINETICA CUERPOS RIGIDOSDocumento5 páginasCINETICA CUERPOS RIGIDOSKIESER DE LA PEÑA GASPARAún no hay calificaciones
- Ejercicios Cap 7 Libro NilsonDocumento9 páginasEjercicios Cap 7 Libro NilsonBryan Challco75% (4)
- 9 - Materiales DieléctricosDocumento10 páginas9 - Materiales DieléctricosMiguel Centellas LeonAún no hay calificaciones
- Diapositiva de Laboratorio #10 de Física I Sesión VirtualDocumento13 páginasDiapositiva de Laboratorio #10 de Física I Sesión Virtualmath.kuni123Aún no hay calificaciones
- MoránSolísMichelle CTG03 PénduloSimpleDocumento8 páginasMoránSolísMichelle CTG03 PénduloSimpleMichelle MoránAún no hay calificaciones
- Ecuacion de Euler para TurbomaquinasDocumento5 páginasEcuacion de Euler para Turbomaquinasjuancarlosjuaquin100% (1)
- Diapositiva de Laboratorio 5 de Física IDocumento13 páginasDiapositiva de Laboratorio 5 de Física IJefferson Quispe PaicoAún no hay calificaciones
- Clase Unidad 6Documento25 páginasClase Unidad 6jonathanAún no hay calificaciones
- Ecuaciones fundamentales de hidráulica y energía en sistemas de bombeoDocumento1 páginaEcuaciones fundamentales de hidráulica y energía en sistemas de bombeoAngel CarrascoAún no hay calificaciones
- Caida LibreDocumento2 páginasCaida LibreIvar CallaAún no hay calificaciones
- 2.-Velocidad, Fuerza y Corriente EléctricaDocumento4 páginas2.-Velocidad, Fuerza y Corriente EléctricaJuan Carlos ChávezAún no hay calificaciones
- Fisicoquímica I: Cambio de entropía en gases ideales y van der WaalsDocumento15 páginasFisicoquímica I: Cambio de entropía en gases ideales y van der WaalsAny de jesus chima oliveroAún no hay calificaciones
- Deducción de La Ecuación General de Conducción de Calor para Una Dimensión - Final Fisica TeoricaDocumento6 páginasDeducción de La Ecuación General de Conducción de Calor para Una Dimensión - Final Fisica TeoricaFlorencia celeste CarrizoAún no hay calificaciones
- Hoja de Fórmulas PsicrometríaDocumento3 páginasHoja de Fórmulas Psicrometríamarco cruzAún no hay calificaciones
- Formulario EstáticaDocumento4 páginasFormulario EstáticaArleth MisAlejosAún no hay calificaciones
- Formulario para Máquinas Axiales-2020-05-29Documento11 páginasFormulario para Máquinas Axiales-2020-05-29Alejandro ViscarretAún no hay calificaciones
- Taller-Leyes NewtonDocumento2 páginasTaller-Leyes NewtonCristian Cabrera ValenciaAún no hay calificaciones
- Taller Leyes Newton-KirchhoffDocumento2 páginasTaller Leyes Newton-KirchhoffCristian Cabrera ValenciaAún no hay calificaciones
- Diodo 2Documento9 páginasDiodo 2Jose MontiveroAún no hay calificaciones
- Dinamica Vibraciones LibresDocumento17 páginasDinamica Vibraciones Libresjorge espinozaAún no hay calificaciones
- Tarea1 Equipo1 CalorymasaDocumento4 páginasTarea1 Equipo1 CalorymasaJoy ju JujuyAún no hay calificaciones
- Formula de FisicoquimicaDocumento1 páginaFormula de FisicoquimicaThadeus Leon Castillo100% (1)
- Tarea 2 FormularioDocumento2 páginasTarea 2 FormularioJorgee BarzolaAún no hay calificaciones
- Leyes de NewtonDocumento4 páginasLeyes de NewtonyuriAún no hay calificaciones
- Choques o ColisionesDocumento12 páginasChoques o ColisionesING. Miguel Angel Sanchez Monzon0% (1)
- Ecuaciones de Maxwell y cambios en el campo electromagnéticoDocumento5 páginasEcuaciones de Maxwell y cambios en el campo electromagnéticoCristiam GutierrezAún no hay calificaciones
- Campos EM II 03 Fuerza ElectromotrizDocumento7 páginasCampos EM II 03 Fuerza ElectromotrizErnesto Guevara NavarroAún no hay calificaciones
- Practica 1 - Pendulo SimpleDocumento8 páginasPractica 1 - Pendulo SimpleMARIA CONCEPCION CARRERA MENDOZAAún no hay calificaciones
- Momento LinealDocumento7 páginasMomento LinealJhoan SebastianAún no hay calificaciones
- CARGA AXIAL - Elementos Estáticamente Indeterminados. Esfuerzos TérmicosDocumento42 páginasCARGA AXIAL - Elementos Estáticamente Indeterminados. Esfuerzos TérmicosAngello FrankzuatAún no hay calificaciones
- Dinámica y energía de rotaciónDocumento28 páginasDinámica y energía de rotaciónAlexander MarcoAún no hay calificaciones
- Dinámica y energía de rotaciónDocumento28 páginasDinámica y energía de rotaciónDevran SmithAún no hay calificaciones
- Resistencia Al Corte LiDocumento11 páginasResistencia Al Corte LilisandroAún no hay calificaciones
- Fisicoquímica Unidad 3Documento2 páginasFisicoquímica Unidad 3AISHA SIMONE GUZMAN RUIZAún no hay calificaciones
- Ecuaciones diferenciales RL troceadorDocumento2 páginasEcuaciones diferenciales RL troceadorCHAVEZ VALADEZ JUAN DIEGOAún no hay calificaciones
- Taller 8Documento17 páginasTaller 8Ana Sofia Parra NiviaAún no hay calificaciones
- Repaso UNI Física Semana 3Documento9 páginasRepaso UNI Física Semana 3mmatty2008Aún no hay calificaciones
- Formulario Física 2010Documento2 páginasFormulario Física 2010Yhosselyne DiazAún no hay calificaciones
- Práctica 10 Carga y Descarga Del CondensadorDocumento19 páginasPráctica 10 Carga y Descarga Del CondensadorPablito PabliñoAún no hay calificaciones
- Método de Vereschaguin oDocumento4 páginasMétodo de Vereschaguin oPierre Cardenas BracamonteAún no hay calificaciones
- B.1. Propiedades de TransporteDocumento13 páginasB.1. Propiedades de Transportevickyferrer24642Aún no hay calificaciones
- Formulario de Termodinamica I Ii-2020Documento5 páginasFormulario de Termodinamica I Ii-2020morelia sejas catalanAún no hay calificaciones
- MAGNETISMODocumento13 páginasMAGNETISMONicoAún no hay calificaciones
- SOLUCIÓN EXAMEN PARCIAL DE MECÁNICA DE FLUIDOS 20 Junio 2020Documento3 páginasSOLUCIÓN EXAMEN PARCIAL DE MECÁNICA DE FLUIDOS 20 Junio 2020zseLENIN LUCANO100% (2)
- Solución Examen Parcial de Mecánica de Fluidos 20 Junio 2020Documento3 páginasSolución Examen Parcial de Mecánica de Fluidos 20 Junio 2020zseLENIN LUCANOAún no hay calificaciones
- Estatica IntensivoDocumento28 páginasEstatica IntensivoTito VillafaneAún no hay calificaciones
- DCVS IIEE - 04 DETECCION-Layout1Documento1 páginaDCVS IIEE - 04 DETECCION-Layout1Juan Carlos Chura CoaquiraAún no hay calificaciones
- Chura Coaquira Juan Carlos - Practica - N°03 - Eia - ADocumento2 páginasChura Coaquira Juan Carlos - Practica - N°03 - Eia - AJuan Carlos Chura CoaquiraAún no hay calificaciones
- Puente GeneralidadesDocumento10 páginasPuente GeneralidadesLEONARDOAún no hay calificaciones
- Práctica 01Documento1 páginaPráctica 01Juan Carlos Chura CoaquiraAún no hay calificaciones
- Examen Ing. Sismorresistente I UnidadDocumento2 páginasExamen Ing. Sismorresistente I UnidadJuan Carlos Chura CoaquiraAún no hay calificaciones
- Logro de Sesión.: Curso. Diseño Instalaciones Eléctricas Residenciales Con AutocadDocumento37 páginasLogro de Sesión.: Curso. Diseño Instalaciones Eléctricas Residenciales Con AutocadJuan Carlos Chura CoaquiraAún no hay calificaciones
- Sci 02-02 - Seleccion de Bombas Ing - Ronaldo CristobalDocumento64 páginasSci 02-02 - Seleccion de Bombas Ing - Ronaldo CristobalJuan Carlos Chura CoaquiraAún no hay calificaciones
- Sci 04-02 - Rociadores y Cavitacion-Ing - Ronaldo CristobalDocumento65 páginasSci 04-02 - Rociadores y Cavitacion-Ing - Ronaldo CristobalJuan Carlos Chura CoaquiraAún no hay calificaciones
- Norma Peruana Instalaciones Electricas-2006Documento285 páginasNorma Peruana Instalaciones Electricas-2006EdwinEscobedoCoaguila87% (23)
- Inventario Vial VevfeDocumento2 páginasInventario Vial VevfeJuan Carlos Chura CoaquiraAún no hay calificaciones
- Diseño e Instalación Eléctrica Residencial con AutoCADDocumento37 páginasDiseño e Instalación Eléctrica Residencial con AutoCADJuan Carlos Chura CoaquiraAún no hay calificaciones
- Caminos 2 - TrabajoDocumento7 páginasCaminos 2 - TrabajoJuan Carlos Chura CoaquiraAún no hay calificaciones
- Estimación consumo energía eléctrica hogar 40WDocumento1 páginaEstimación consumo energía eléctrica hogar 40WJuan Carlos Chura CoaquiraAún no hay calificaciones
- Estudio de Impacto AmbientalDocumento8 páginasEstudio de Impacto AmbientalJuan Carlos Chura CoaquiraAún no hay calificaciones
- INSTRUCCIONES PARA EXPOSICIÓN 2da ParteDocumento1 páginaINSTRUCCIONES PARA EXPOSICIÓN 2da ParteJuan Carlos Chura CoaquiraAún no hay calificaciones
- AnalisisDocumento24 páginasAnalisisJuan Carlos Chura CoaquiraAún no hay calificaciones
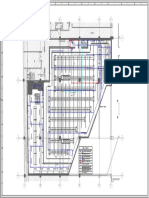
- Distribución interior botica farmacéuticaDocumento1 páginaDistribución interior botica farmacéuticaJuan Carlos Chura CoaquiraAún no hay calificaciones
- Indice - 20210317 - 201952 - 959Documento2 páginasIndice - 20210317 - 201952 - 959Juan Carlos Chura CoaquiraAún no hay calificaciones
- Inventario Vial - Palca Anexo MicullaDocumento10 páginasInventario Vial - Palca Anexo MicullaJuan Carlos Chura CoaquiraAún no hay calificaciones
- DOCUMENTACIONDocumento11 páginasDOCUMENTACIONJuan Carlos Chura CoaquiraAún no hay calificaciones
- Visita obra construcción Escuela Ingeniería Civil UNJBGDocumento14 páginasVisita obra construcción Escuela Ingeniería Civil UNJBGJuan Carlos Chura CoaquiraAún no hay calificaciones
- Contratacion de Un Supervisor de Obra-CarreteraDocumento15 páginasContratacion de Un Supervisor de Obra-CarreteraJuan Carlos Chura CoaquiraAún no hay calificaciones
- Goblin Kingdom 001-215Documento3319 páginasGoblin Kingdom 001-215Juan Carlos Chura CoaquiraAún no hay calificaciones
- Distribucion de Temas - Memoria DescriptivaDocumento1 páginaDistribucion de Temas - Memoria DescriptivaJuan Carlos Chura CoaquiraAún no hay calificaciones
- 5TH Polinómica - Updated - 2021Documento7 páginas5TH Polinómica - Updated - 2021Juan Carlos Chura CoaquiraAún no hay calificaciones
- Escalonado 100% IndiceDocumento1 páginaEscalonado 100% IndiceJuan Carlos Chura CoaquiraAún no hay calificaciones
- 3rd Modelo Acu - BaseDocumento7 páginas3rd Modelo Acu - BaseJuan Carlos Chura CoaquiraAún no hay calificaciones
- 2ND Modelo ACU 01Documento5 páginas2ND Modelo ACU 01Juan Carlos Chura CoaquiraAún no hay calificaciones
- 4TH Modelo ACU MADERA TRIPLAY - BASEDocumento3 páginas4TH Modelo ACU MADERA TRIPLAY - BASEJuan Carlos Chura CoaquiraAún no hay calificaciones
- Checklist prensa hidráulicaDocumento2 páginasChecklist prensa hidráulicamichell carbajalAún no hay calificaciones
- Máquina dobladora de tubo redondo de aceroDocumento121 páginasMáquina dobladora de tubo redondo de aceropardocarr4091100% (1)
- I-OM-005 SOLDADURA WPS-PQR Rev.01Documento13 páginasI-OM-005 SOLDADURA WPS-PQR Rev.01Jorge MelendezAún no hay calificaciones
- Resistencia de materiales: Esfuerzos en cilindros sometidos a torsiónDocumento3 páginasResistencia de materiales: Esfuerzos en cilindros sometidos a torsiónNelson Humberto Coronado OicatáAún no hay calificaciones
- Fassi F95Documento8 páginasFassi F95gamboloAún no hay calificaciones
- Que Es TensiónDocumento6 páginasQue Es TensiónJORGE MARIO GONZALEZ CARDONAAún no hay calificaciones
- CompresoresDocumento23 páginasCompresoresKike Martinez AtzompaAún no hay calificaciones
- 2da Condicion de EquilibrioDocumento5 páginas2da Condicion de EquilibrioEdson Luis Egusquiza CordovaAún no hay calificaciones
- PS2-1-INTERCAMBIO DE CALOR-problemasDocumento3 páginasPS2-1-INTERCAMBIO DE CALOR-problemasFrancisko T. A SkAún no hay calificaciones
- 8 Esfuerzos Combinados T8Documento36 páginas8 Esfuerzos Combinados T8Anonymous 461ZER89w100% (2)
- Diseño de MaderaDocumento18 páginasDiseño de Maderacesar canto acostaAún no hay calificaciones
- PressureDocumento36 páginasPressureJuan PatonAún no hay calificaciones
- Análisis Del Diseño y Funcionamiento de Un GeneradorDocumento6 páginasAnálisis Del Diseño y Funcionamiento de Un GeneradorAndres Eduardo VegaAún no hay calificaciones
- Práctica Física Grupo 14Documento7 páginasPráctica Física Grupo 14Yerko A. Quispe Ticona0% (1)
- Trasmision At98 PlatinaDocumento92 páginasTrasmision At98 PlatinaJonny OrdoñezAún no hay calificaciones
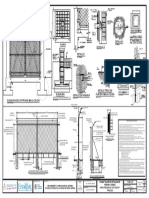
- Plano de Porton y Cerca Perimetral de Malla CiclonDocumento1 páginaPlano de Porton y Cerca Perimetral de Malla CiclonAlexander Aguinaga Espinoza100% (7)
- 5 Memoria DescriptivaDocumento17 páginas5 Memoria Descriptivajose diaz collantesAún no hay calificaciones
- Ciclo-01-Ie-Física IDocumento7 páginasCiclo-01-Ie-Física IFERNÁNDEZ GÓMEZ GIANPIERRE CÉSARAún no hay calificaciones
- Service 40.000Documento13 páginasService 40.000José Santos Hernández PrietoAún no hay calificaciones
- Taller #3 SUASNAVASDocumento4 páginasTaller #3 SUASNAVASHen Ry83% (6)
- 168 - Hardox - 450 - MX - Ficha Tecnica PDFDocumento2 páginas168 - Hardox - 450 - MX - Ficha Tecnica PDFGerardo Jesús VidalAún no hay calificaciones
- HIDRÁULICADocumento140 páginasHIDRÁULICALuis Caballero100% (1)
- Ecp Uce 17062 Gma Id05 0 Gen Co 301 1Documento11 páginasEcp Uce 17062 Gma Id05 0 Gen Co 301 1David Fernando Bedoya RomeroAún no hay calificaciones
- Problemas de Equilibrio y RozamientoDocumento11 páginasProblemas de Equilibrio y Rozamientoorlan2_rAún no hay calificaciones
- Movimiento Oscilatorio HMPDocumento8 páginasMovimiento Oscilatorio HMPnicol chambi arriolaAún no hay calificaciones
- Bomba de AguaDocumento2 páginasBomba de Aguajim_qgradosAún no hay calificaciones
- Metrado Agua y Agua Contra IncendioDocumento4 páginasMetrado Agua y Agua Contra IncendioHoreb Pedro AntonioAún no hay calificaciones
- Pre-Informe No. 2Documento8 páginasPre-Informe No. 2CINDY MILENA JIMÉNEZ RACEROAún no hay calificaciones
- Fundamentos de Refrigeración y El Sistema Por Compresión de Vapor.Documento6 páginasFundamentos de Refrigeración y El Sistema Por Compresión de Vapor.Juan Manuel TrujilloAún no hay calificaciones