También podría gustarte
- 9 PlanaridadDocumento4 páginas9 PlanaridadPerla VilleAlAún no hay calificaciones
- Bode DiagramaDocumento37 páginasBode DiagramaJesus Ferro VillaAún no hay calificaciones
- 3 Prisma y CilindroDocumento2 páginas3 Prisma y CilindroMaribel Liñan GalindoAún no hay calificaciones
- Momento Flector, Esfuerzo de Corte y Normal (M.Q.N)Documento18 páginasMomento Flector, Esfuerzo de Corte y Normal (M.Q.N)Jesus OjedaAún no hay calificaciones
- Introducción A La Teoría de Grafos-MejoradoDocumento43 páginasIntroducción A La Teoría de Grafos-MejoradoBenjamin BenyanAún no hay calificaciones
- Unmsm Sistemas de Medida AngularDocumento3 páginasUnmsm Sistemas de Medida AngularMark Valvas RoblesAún no hay calificaciones
- AlgoritmosDocumento31 páginasAlgoritmosFaekefaAún no hay calificaciones
- 37 Teorema Green PDFDocumento13 páginas37 Teorema Green PDFLuiggi Cano SolanoAún no hay calificaciones
- Areas Figuras PlanasDocumento2 páginasAreas Figuras PlanasAcademy ProfesAún no hay calificaciones
- Algo3 Planar HandoutDocumento4 páginasAlgo3 Planar HandoutMarvin Quiroz BaezAún no hay calificaciones
- Angulos y RectasDocumento13 páginasAngulos y RectasAna CuentalAún no hay calificaciones
- Prismas y CilindrosDocumento8 páginasPrismas y CilindrosEdwin Chura ChoqueAún no hay calificaciones
- Secretos de Geometria 3dDocumento4 páginasSecretos de Geometria 3dJuan100% (1)
- Semana 6 Funcion Logaritmo y La DerivadaDocumento32 páginasSemana 6 Funcion Logaritmo y La Derivadaalejandra baggAún no hay calificaciones
- DIGRAFOSDocumento13 páginasDIGRAFOSYanina CaballeroAún no hay calificaciones
- Introducción A La Teoría de Grafos-ListoDocumento40 páginasIntroducción A La Teoría de Grafos-ListoFlor ChancoAún no hay calificaciones
- 3 Introducción A La Teoría de Grafos-HamiltonianoDocumento52 páginas3 Introducción A La Teoría de Grafos-HamiltonianoVictor Paricahua LopezAún no hay calificaciones
- Clase Materia 1 CalculoDocumento83 páginasClase Materia 1 CalculoRiche Brian OjedaAún no hay calificaciones
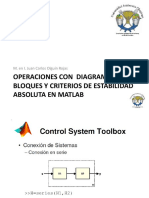
- C1 - Diagramas A Bloques y Estabilidad AbsolutaDocumento22 páginasC1 - Diagramas A Bloques y Estabilidad AbsolutaEnoc Rios AvendañoAún no hay calificaciones
- Areas de FigurasDocumento2 páginasAreas de Figurasguadalupe requejoAún no hay calificaciones
- Circunferencia y Circulo 2.ppsxDocumento11 páginasCircunferencia y Circulo 2.ppsxDaniel SanAún no hay calificaciones
- AreasDocumento2 páginasAreasJuan Lopez LopezAún no hay calificaciones
- Tarea#4 - Ejemplo de CompensadoresDocumento30 páginasTarea#4 - Ejemplo de CompensadoresFrancisco Xavier Sevilla R.50% (2)
- Geometría - Reg 13 - Sólidos GeométricosDocumento6 páginasGeometría - Reg 13 - Sólidos GeométricosNicolle Campos chamorroAún no hay calificaciones
- Clase Reduccion de Multiples Sub SistemasDocumento20 páginasClase Reduccion de Multiples Sub SistemasJesus Tapia GallardoAún no hay calificaciones
- UNIDAD IV Paralelismo y PerpendicularidadDocumento6 páginasUNIDAD IV Paralelismo y PerpendicularidadJorge LopezAún no hay calificaciones
- 1401-19 MATEMÁTICA TrigonometríaDocumento48 páginas1401-19 MATEMÁTICA TrigonometríaGisela MelegattiAún no hay calificaciones
- Teoría de Grafos 2020-20 - 1Documento76 páginasTeoría de Grafos 2020-20 - 1Clases virtuales con Miss KarinaAún no hay calificaciones
- Fichas GeometríaDocumento4 páginasFichas GeometríaMylagritos Llauce NiñoAún no hay calificaciones
- Taller Segmentos Y RectasDocumento7 páginasTaller Segmentos Y RectasVerónica HiguitaAún no hay calificaciones
- Carpeta de Evidencias Funciones MatematicasDocumento16 páginasCarpeta de Evidencias Funciones MatematicasEstefaniaArzolaAún no hay calificaciones
- Algo3 Teo PlanarDocumento36 páginasAlgo3 Teo PlanarMartin FierroAún no hay calificaciones
- Guía Área y Volumen de SólidosDocumento9 páginasGuía Área y Volumen de SólidosBENJAMÍN GARCÍA GUERRAAún no hay calificaciones
- Geometria y Trigonometra2Documento3 páginasGeometria y Trigonometra2Mary UMAún no hay calificaciones
- Trayectoria y Propiedades de Las RelacionesDocumento4 páginasTrayectoria y Propiedades de Las RelacionesSantiago SabbioniAún no hay calificaciones
- Repaso y Aclaración de ConceptosDocumento8 páginasRepaso y Aclaración de ConceptosJason Novoa NietoAún no hay calificaciones
- POLÍGONOSDocumento2 páginasPOLÍGONOSkiararodriguez1701Aún no hay calificaciones
- Vigas Parte 1Documento17 páginasVigas Parte 1EugeeAún no hay calificaciones
- Diagrama de BloquesDocumento7 páginasDiagrama de BloquesNicole MorenoAún no hay calificaciones
- Semana 02 Teoría TrigonometríaDocumento8 páginasSemana 02 Teoría Trigonometríaequipowryb16Aún no hay calificaciones
- Piramide, Cono y Esfera IDocumento8 páginasPiramide, Cono y Esfera ISharit Maylle ArrateaAún no hay calificaciones
- C Sem24 GeometriaDocumento5 páginasC Sem24 GeometriaYair Wëë UntëlaAún no hay calificaciones
- 26 Intg. Doble Polar PDFDocumento13 páginas26 Intg. Doble Polar PDFLuiggi Cano SolanoAún no hay calificaciones
- II Bimestre - GeometriaDocumento35 páginasII Bimestre - GeometriaMaribel CabreraAún no hay calificaciones
- Diagramas de Bloques UnifranzDocumento32 páginasDiagramas de Bloques UnifranzDanielAún no hay calificaciones
- Apuntes de TrigonometríaDocumento2 páginasApuntes de TrigonometríaMartaAún no hay calificaciones
- Ejemplos RelativoDocumento13 páginasEjemplos RelativoYasher BasharatAún no hay calificaciones
- Areas de Poligonos PDFDocumento1 páginaAreas de Poligonos PDFMaría de la Montaña Ortiz BotelloAún no hay calificaciones
- 1 Area de Regiones PlanasDocumento9 páginas1 Area de Regiones PlanasedesmitAún no hay calificaciones
- NomenclaturaDocumento2 páginasNomenclaturaZecharía A. RiostaAún no hay calificaciones
- mdl2 Teorico3Documento5 páginasmdl2 Teorico3Joshep EstrellaAún no hay calificaciones
- Alg Mntal 1a LLDocumento706 páginasAlg Mntal 1a LLsamuelbg0192Aún no hay calificaciones
- CircunferenciaDocumento4 páginasCircunferenciaadrian SanchezAún no hay calificaciones
- 2021.ED - Capitulo GafosDocumento43 páginas2021.ED - Capitulo GafosTiago CoelhoAún no hay calificaciones
- Regiones PoligonalesDocumento5 páginasRegiones PoligonalesRoxi Casti EstraAún no hay calificaciones
- Po23ag8 2Documento5 páginasPo23ag8 2Roxi Casti EstraAún no hay calificaciones
- Apuntes Geometría Proyectiva FMG v2.2Documento57 páginasApuntes Geometría Proyectiva FMG v2.2padulin_colorao100% (1)
- 1 Sistema de Medicion Angular - EscolarDocumento2 páginas1 Sistema de Medicion Angular - EscolarWilber Ramos Cart0% (1)
- Ort TransparenciasDocumento65 páginasOrt Transparenciasothon_2010Aún no hay calificaciones
- Emp Are Jamie NtosDocumento24 páginasEmp Are Jamie Ntosothon_2010Aún no hay calificaciones
- Algoritmo de Planaridad - ProblemasDocumento1 páginaAlgoritmo de Planaridad - Problemasothon_2010Aún no hay calificaciones
- DFSconectividad TransparenciasDocumento37 páginasDFSconectividad Transparenciasothon_2010Aún no hay calificaciones
- DFSconectividad ProblemasDocumento1 páginaDFSconectividad Problemasothon_2010Aún no hay calificaciones
- 0 Intro Ducci OnDocumento27 páginas0 Intro Ducci Onothon_2010Aún no hay calificaciones
- Material Complement A RioDocumento109 páginasMaterial Complement A RioMaria Laura Campos LopezAún no hay calificaciones
- GrafosDocumento14 páginasGrafosOmerAún no hay calificaciones
- Grafos ColoreablesDocumento5 páginasGrafos ColoreablesAngel Gutierrez100% (1)
- Maco U3 A2 RommDocumento5 páginasMaco U3 A2 RommchabeAún no hay calificaciones
- Kmdi U2 A1 JfgoDocumento10 páginasKmdi U2 A1 JfgoJose GodoyAún no hay calificaciones
- Arbol de Costo MinimoDocumento25 páginasArbol de Costo MinimoFrank Resurrection100% (1)
- Sol PC6Documento3 páginasSol PC6Linda Salazar FloresAún no hay calificaciones
- Problemas Esquemas Algoritmicos ColeccionDocumento29 páginasProblemas Esquemas Algoritmicos ColeccionshabedekamAún no hay calificaciones
- Práctica Dirigida #12 Matemática Discreta 2023-10 ResueltaDocumento7 páginasPráctica Dirigida #12 Matemática Discreta 2023-10 ResueltaJosé ZansAún no hay calificaciones
- Subgrafos y SubdigrafosDocumento8 páginasSubgrafos y Subdigrafoscarlos lafontAún no hay calificaciones
- Practica Nro 1 CD1 Propuesta Io IiDocumento6 páginasPractica Nro 1 CD1 Propuesta Io IiJuan Luis Hulo PomaAún no hay calificaciones
- Teoría de Grafos: Grupo: C - Semestre: I - 2023Documento4 páginasTeoría de Grafos: Grupo: C - Semestre: I - 2023Pablo jhire torrez chavezAún no hay calificaciones
- Cap2 PREDADocumento65 páginasCap2 PREDAArturo BarbaAún no hay calificaciones
- Trabajo de Estructura de DatosDocumento20 páginasTrabajo de Estructura de DatosNelson Rojas George100% (1)
- Problemas Flujo Maximo y Costo MinimoDocumento14 páginasProblemas Flujo Maximo y Costo MinimoarmandoAún no hay calificaciones
- $RRJSCBPDocumento32 páginas$RRJSCBPPAUL SIERRA CORDOVAAún no hay calificaciones
- Aplicaciones A La Teoria de GrafosDocumento5 páginasAplicaciones A La Teoria de GrafosmarceloberdaguerAún no hay calificaciones
- Grrggrggggafos Regulares y Solidos PlatonicosDocumento2 páginasGrrggrggggafos Regulares y Solidos PlatonicosAnonymous caYOezAún no hay calificaciones
- La Teoría de GrafosDocumento3 páginasLa Teoría de GrafosnovaureAún no hay calificaciones
- Tarea AlgebraDocumento6 páginasTarea Algebraluis eduardo garzonAún no hay calificaciones
- Algoritmo de Bellman-FordDocumento33 páginasAlgoritmo de Bellman-FordFabio Augusto Vanegas BoveaAún no hay calificaciones
- Algoritmo de Ordenamiento TopologicoDocumento3 páginasAlgoritmo de Ordenamiento TopologicoFabio GutierrezAún no hay calificaciones
- Grafos MatricesDocumento21 páginasGrafos MatricesJULIAN DAVID RINCON CASTROAún no hay calificaciones
- 40RMDocumento9 páginas40RMJesus Santos Alvarez100% (1)
- Teorema Dirac y OreDocumento4 páginasTeorema Dirac y OreMelanieAún no hay calificaciones
- Práctica de LógicaDocumento45 páginasPráctica de LógicaLoreley DominguezAún no hay calificaciones
- Practica Tema 1Documento21 páginasPractica Tema 1Talhia B-oAún no hay calificaciones
- Semana 22 Habilidad Lógico - MatemáticaDocumento8 páginasSemana 22 Habilidad Lógico - MatemáticaEdinson Roncal OrtizAún no hay calificaciones
- Clase Java Haskell GrafosDocumento3 páginasClase Java Haskell GrafosDavid jimenez maestroAún no hay calificaciones
- Producto Académico N 03Documento4 páginasProducto Académico N 03xhozzit giron dagaAún no hay calificaciones
- Didáctica de la matemática en la escuela primariaDe EverandDidáctica de la matemática en la escuela primariaCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Problemas de física general en un año olímpicoDe EverandProblemas de física general en un año olímpicoCalificación: 5 de 5 estrellas5/5 (1)
- La Biblia de las Matemáticas RápidasDe EverandLa Biblia de las Matemáticas RápidasCalificación: 4.5 de 5 estrellas4.5/5 (19)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasDe EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasCalificación: 5 de 5 estrellas5/5 (4)
- La Teoría de Conjuntos y los Fundamentos de las MatemáticasDe EverandLa Teoría de Conjuntos y los Fundamentos de las MatemáticasCalificación: 5 de 5 estrellas5/5 (1)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraDe EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraCalificación: 4.5 de 5 estrellas4.5/5 (5)
- Enseñar Matemática hoy: Miradas, sentidos y desafíosDe EverandEnseñar Matemática hoy: Miradas, sentidos y desafíosCalificación: 5 de 5 estrellas5/5 (1)
- Física paso a paso: Más de 100 problemas resueltosDe EverandFísica paso a paso: Más de 100 problemas resueltosCalificación: 4 de 5 estrellas4/5 (12)
- El método de los elementos finitos: Un enfoque teórico prácticoDe EverandEl método de los elementos finitos: Un enfoque teórico prácticoCalificación: 3 de 5 estrellas3/5 (4)
- Mi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaDe EverandMi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaCalificación: 5 de 5 estrellas5/5 (5)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalCalificación: 5 de 5 estrellas5/5 (3)
- NIKOLA TESLA: Mis Inventos - AutobiografiaDe EverandNIKOLA TESLA: Mis Inventos - AutobiografiaCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Guía práctica para la refracción ocularDe EverandGuía práctica para la refracción ocularCalificación: 5 de 5 estrellas5/5 (2)
- Estadística básica: Introducción a la estadística con RDe EverandEstadística básica: Introducción a la estadística con RCalificación: 5 de 5 estrellas5/5 (8)
- Mecánica cuántica para principiantesDe EverandMecánica cuántica para principiantesCalificación: 3.5 de 5 estrellas3.5/5 (5)
- Los mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosDe EverandLos mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosCalificación: 5 de 5 estrellas5/5 (2)
- Álgebra lineal aplicada a las ciencias económicas 2edDe EverandÁlgebra lineal aplicada a las ciencias económicas 2edCalificación: 4 de 5 estrellas4/5 (1)
- La guía definitiva en Matemáticas para el Ingreso al BachilleratoDe EverandLa guía definitiva en Matemáticas para el Ingreso al BachilleratoCalificación: 4.5 de 5 estrellas4.5/5 (9)
- Introducción a las ecuaciones de la física matemáticaDe EverandIntroducción a las ecuaciones de la física matemáticaCalificación: 5 de 5 estrellas5/5 (4)
- La magia de los números: 136 recreaciones aritméticas y geométricasDe EverandLa magia de los números: 136 recreaciones aritméticas y geométricasCalificación: 1 de 5 estrellas1/5 (1)
- Visualización: Cambie su vida en cuatro semanas utilizando la ley de atracciónDe EverandVisualización: Cambie su vida en cuatro semanas utilizando la ley de atracciónCalificación: 5 de 5 estrellas5/5 (18)
- Convertidores conmutados de potencia: Test de autoevaluaciónDe EverandConvertidores conmutados de potencia: Test de autoevaluaciónCalificación: 5 de 5 estrellas5/5 (1)