También podría gustarte
- Descubre Cuánto Sabes de Microsoft EXCEL®Documento41 páginasDescubre Cuánto Sabes de Microsoft EXCEL®rau100% (1)
- Ensayo de Programacion LinealDocumento5 páginasEnsayo de Programacion LinealJulio César Benitez44% (9)
- Elementos de Programación LinealDocumento6 páginasElementos de Programación LinealJonatanesram Esram100% (1)
- Optimizacion en Ingenieria Quimica (Udec) PDFDocumento88 páginasOptimizacion en Ingenieria Quimica (Udec) PDFSofia Mac Rodri100% (1)
- Trabajo Final Aplicación de La DerivadaDocumento14 páginasTrabajo Final Aplicación de La DerivadaJesús GuerrąAún no hay calificaciones
- Programación Entera: Métodos de ResoluciónDocumento7 páginasProgramación Entera: Métodos de ResoluciónCaribayAún no hay calificaciones
- La Esencia Del Método Simplex.Documento4 páginasLa Esencia Del Método Simplex.shamir cueto100% (1)
- Plan de Estudios Administración Mención InformáticaDocumento6 páginasPlan de Estudios Administración Mención InformáticaRakhel GilAún no hay calificaciones
- Semana 3 OptprocesosDocumento20 páginasSemana 3 OptprocesosMendoza Picazo Jesús AbrahamAún no hay calificaciones
- Capitulo 14-ResumenDocumento7 páginasCapitulo 14-ResumenJL SantanaAún no hay calificaciones
- Programacion EnteraDocumento14 páginasProgramacion EnteraWilliamMorles100% (1)
- Modelo de TransportaciónDocumento6 páginasModelo de TransportaciónElizabeth Santos100% (1)
- Método SimplexDocumento30 páginasMétodo SimplexMari ValdesAún no hay calificaciones
- Modelo de TransportaciónDocumento11 páginasModelo de TransportaciónMiguel Angel Berihuete ReyesAún no hay calificaciones
- TEMA 1 ACTIVIDAD 2 B. Resumen Fabiola Jiménez JiménezDocumento10 páginasTEMA 1 ACTIVIDAD 2 B. Resumen Fabiola Jiménez JiménezFabiola Jimenez JimenezAún no hay calificaciones
- El Método SimplexDocumento19 páginasEl Método Simplexcarlos gamarra mercadoAún no hay calificaciones
- Programación Lineal y PERT. DODocumento20 páginasProgramación Lineal y PERT. DOJohn Leyton VelásquezAún no hay calificaciones
- Optimización Sin Restricciones en Funciones de Una y Varias Variables, Optimización Restringida y Métodos de Aproximaciones LinealesDocumento39 páginasOptimización Sin Restricciones en Funciones de Una y Varias Variables, Optimización Restringida y Métodos de Aproximaciones Linealesfrancisco gomez50% (2)
- Unidad 3 IODocumento10 páginasUnidad 3 IOLizethLoVeHernandezAún no hay calificaciones
- Optimización Sin Restricciones en Funciones de Una y Varias Variables, Optimización Restringida y Métodos de Aproximaciones Lineales - William MataDocumento28 páginasOptimización Sin Restricciones en Funciones de Una y Varias Variables, Optimización Restringida y Métodos de Aproximaciones Lineales - William MataWilliamAún no hay calificaciones
- 2 6AnalisisdeResultadosDocumento8 páginas2 6AnalisisdeResultadosMercedes Alicia HrAún no hay calificaciones
- Ensayo de Programacion Lineal PDFDocumento5 páginasEnsayo de Programacion Lineal PDFadriana bustilloAún no hay calificaciones
- Act 2 Tema 2 Dominguez MarielaDocumento6 páginasAct 2 Tema 2 Dominguez Marielamariela22500578domAún no hay calificaciones
- Teoria de Programacion DinamicaDocumento138 páginasTeoria de Programacion DinamicaLeydy Calizaya Melo75% (4)
- SumativoDocumento52 páginasSumativoashlyAún no hay calificaciones
- Cálculo diferencial: Introducción y aplicacionesDocumento23 páginasCálculo diferencial: Introducción y aplicacionesXavier CoriaAún no hay calificaciones
- Aplicaciones de Las Derivadas ParcialesDocumento26 páginasAplicaciones de Las Derivadas Parcialesjuan pillcoAún no hay calificaciones
- Metodo SimplexDocumento9 páginasMetodo SimplexContreras Cn Joel100% (1)
- Programacion LinealDocumento36 páginasProgramacion LinealAna Karina Pinto GuillenAún no hay calificaciones
- Algoritmo de Puntos Interiores Aplicado Al Problema DDocumento14 páginasAlgoritmo de Puntos Interiores Aplicado Al Problema DKevin QuiquiaAún no hay calificaciones
- TitiDocumento9 páginasTitiDaniel RodríguezAún no hay calificaciones
- Programación DinámicaDocumento10 páginasProgramación DinámicaGiovanni MorccollaAnccoAún no hay calificaciones
- ANALISISDocumento58 páginasANALISISAbby AvendañoAún no hay calificaciones
- Proyecto Calculo VectorialDocumento5 páginasProyecto Calculo Vectorialmercedes_benitez_867% (3)
- Calculo Diferencial Eje 2Documento11 páginasCalculo Diferencial Eje 2alinaAún no hay calificaciones
- Programación LinealDocumento11 páginasProgramación LinealAngela Martinez SandovalAún no hay calificaciones
- Clase 3Documento16 páginasClase 3Jenifer Cordero BedoyaAún no hay calificaciones
- Optimización no lineal: Métodos y algoritmos para resolver problemas matemáticosDocumento17 páginasOptimización no lineal: Métodos y algoritmos para resolver problemas matemáticosJhonaly Karin Flores MaldonadoAún no hay calificaciones
- Programación Dinámica DeterministaDocumento4 páginasProgramación Dinámica DeterministaJean Paul PereaAún no hay calificaciones
- Programacion Lineal - GreciaDocumento6 páginasProgramacion Lineal - GreciaIsaac Isaac AlcalaAún no hay calificaciones
- Castro Isaac 7319 EnsayoDocumento9 páginasCastro Isaac 7319 EnsayoCristian IncaAún no hay calificaciones
- Programacion no LinealDocumento8 páginasProgramacion no LinealolivermancedcaAún no hay calificaciones
- Programación lineal: modelos matemáticosDocumento11 páginasProgramación lineal: modelos matemáticosOscar Rene Polo Barranco100% (1)
- ClasesDocumento7 páginasClasesLaddy DianaAún no hay calificaciones
- Erick Cahuex Aplicación de Las Integrales en La ArquitecturaDocumento15 páginasErick Cahuex Aplicación de Las Integrales en La ArquitecturaBILY GMAún no hay calificaciones
- Importancia de Los Metodos Numericos.Documento8 páginasImportancia de Los Metodos Numericos.HugoAún no hay calificaciones
- PROGRAMACIÓN LINEAL Y MODELOS DE INVESTIGACIÓN DE OPERACIONESDocumento10 páginasPROGRAMACIÓN LINEAL Y MODELOS DE INVESTIGACIÓN DE OPERACIONESFabian Andres Diaz MalpikAún no hay calificaciones
- 3-3 - Tipos de Problemas de Programación No LinealDocumento8 páginas3-3 - Tipos de Problemas de Programación No LinealArata NovachronnoAún no hay calificaciones
- Método de La Esquina NoroesteDocumento7 páginasMétodo de La Esquina NoroesteFranklin Jara MoncayoAún no hay calificaciones
- Trabajo FinalDocumento30 páginasTrabajo FinalMamafocas TeamAún no hay calificaciones
- Tarea 4 Investigación de Operaciones 1Documento4 páginasTarea 4 Investigación de Operaciones 1Amaurys melo de la cruzAún no hay calificaciones
- Métodos NuméricosDocumento217 páginasMétodos NuméricosAlfonso Guzman BeristainAún no hay calificaciones
- UNIDAD - 3 - LoDocumento25 páginasUNIDAD - 3 - Loluz nerisAún no hay calificaciones
- Evidencia #2 Investigacion Tema 2Documento18 páginasEvidencia #2 Investigacion Tema 2Alexander Fabian Flores AvalosAún no hay calificaciones
- Universidad Nacional de San Antonio Abad Del Cusco: Escuela Profesional de Ingenieria CivilDocumento7 páginasUniversidad Nacional de San Antonio Abad Del Cusco: Escuela Profesional de Ingenieria CivilLEONARDO CRISTIAN LUNA BEJARAún no hay calificaciones
- Algoritmos Especiales de Programación LinealDocumento18 páginasAlgoritmos Especiales de Programación LinealMichael Guadalupe Pino HernandezAún no hay calificaciones
- OptimizacionDocumento18 páginasOptimizacionjuanraul.rojas9165Aún no hay calificaciones
- Optimización de sistemas: elementos, funciones y restriccionesDocumento88 páginasOptimización de sistemas: elementos, funciones y restriccionesluisbmwm6Aún no hay calificaciones
- Geometric modeling in computer: Aided geometric designDe EverandGeometric modeling in computer: Aided geometric designAún no hay calificaciones
- Pruebas de Software - GreenSQA - Pruebas Funcionales y No FuncionalesDocumento10 páginasPruebas de Software - GreenSQA - Pruebas Funcionales y No FuncionalesErcilia Antonia HernandezAún no hay calificaciones
- AutoCAD para Todos - 100% Práctico Ejercicio Desarrollado 02 - AutoCAD BásicoDocumento8 páginasAutoCAD para Todos - 100% Práctico Ejercicio Desarrollado 02 - AutoCAD BásicorichardcoroAún no hay calificaciones
- CurpDocumento1 páginaCurpHECTOR NIETO QUINTANARAún no hay calificaciones
- Anexo - Actividad 5 - 4 Unidad 5 - INF206 - 201910Documento36 páginasAnexo - Actividad 5 - 4 Unidad 5 - INF206 - 201910Maria Teresa SorianoAún no hay calificaciones
- Las Organizaciones y Como Usan Las TicDocumento8 páginasLas Organizaciones y Como Usan Las TicCebaAún no hay calificaciones
- Delphi - InformaticaDocumento6 páginasDelphi - InformaticaRosanaAún no hay calificaciones
- Cajera manualDocumento3 páginasCajera manualvirginia diazAún no hay calificaciones
- Nova - Manual - Tokyo Dawn Knowledge BaseDocumento36 páginasNova - Manual - Tokyo Dawn Knowledge BaseMonitos GarínAún no hay calificaciones
- El ser humano y la evolución tecnológicaDocumento4 páginasEl ser humano y la evolución tecnológicaDavid OrellanaAún no hay calificaciones
- CF 2G Manual de Comandos Rev004 PDFDocumento511 páginasCF 2G Manual de Comandos Rev004 PDFCarolina RomanoAún no hay calificaciones
- 0001 000000075843395.parDocumento1 página0001 000000075843395.parjorge garciaAún no hay calificaciones
- 3.4.6-Lab - Configure-Vlans-And-Trunking - es-XLDocumento9 páginas3.4.6-Lab - Configure-Vlans-And-Trunking - es-XLStigma137Aún no hay calificaciones
- 552402mspDocumento1 página552402mspLeonardo MolinaAún no hay calificaciones
- Proyecto Radio Enlace IMR NetSystemDocumento54 páginasProyecto Radio Enlace IMR NetSystemJhonattanEscorihuelaAún no hay calificaciones
- Informe-EstructuraDocumento4 páginasInforme-EstructuraRebeca SalinasAún no hay calificaciones
- Ergonomía ComputacionalDocumento2 páginasErgonomía ComputacionalDora ContreraAún no hay calificaciones
- Guia de MotivacionDocumento6 páginasGuia de Motivacionapi-242939762Aún no hay calificaciones
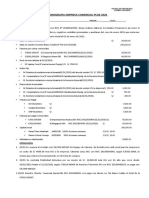
- Gestión contable empresa Genesis Digital S.AC. enero 2021Documento2 páginasGestión contable empresa Genesis Digital S.AC. enero 2021katherin azucena arrascue pairazamanAún no hay calificaciones
- Cobras Por Lo Que Sabes o Por Lo Que HacesDocumento2 páginasCobras Por Lo Que Sabes o Por Lo Que HacesDayan RousseAún no hay calificaciones
- Arboles BinariosDocumento1 páginaArboles BinariosPriscila CodringtonAún no hay calificaciones
- 5.4 IIC3113 PMBOK - Dominios - PlanificacionDocumento33 páginas5.4 IIC3113 PMBOK - Dominios - PlanificacionJuampi Sáez DonosoAún no hay calificaciones
- Ciclo de Funcionamiento Del PLC: Las Rutinas de Inicio y de Programa de Un PLC Típico SonDocumento26 páginasCiclo de Funcionamiento Del PLC: Las Rutinas de Inicio y de Programa de Un PLC Típico SonErick Moscoso BravoAún no hay calificaciones
- SistemasDocumento5 páginasSistemasCristian CaizaAún no hay calificaciones
- HIARTIFICIALhastapag 22Documento4 páginasHIARTIFICIALhastapag 22carlos daniel arcos robleroAún no hay calificaciones
- Silabo Matemática DiscretaDocumento4 páginasSilabo Matemática DiscretaDavid VegaAún no hay calificaciones
- Diferencias Enfoque Procedimental y DescriptivoDocumento6 páginasDiferencias Enfoque Procedimental y DescriptivoPamela Tatiana Paredes CabanaAún no hay calificaciones
- UNIX-Practica VI SiDocumento3 páginasUNIX-Practica VI Sidaw03.2024Aún no hay calificaciones
- Qué Es El Desarrollo de SoftwareDocumento4 páginasQué Es El Desarrollo de SoftwareCiber y Papelería DayalAún no hay calificaciones