También podría gustarte
- Curso Presencial Ajuste de Parámetros de Moldeo Por Inyección CPPLAST 2022Documento8 páginasCurso Presencial Ajuste de Parámetros de Moldeo Por Inyección CPPLAST 2022Marcial Quito SernaquéAún no hay calificaciones
- Historia de Gastronomia EgipciaDocumento25 páginasHistoria de Gastronomia Egipciafernando gutierrez bejar100% (1)
- Programación en ArduinoDocumento34 páginasProgramación en ArduinoJohn Morillo100% (1)
- Programas ArduinoDocumento8 páginasProgramas Arduinomicha2mcAún no hay calificaciones
- Ejercicios ArduinoDocumento11 páginasEjercicios Arduinoolaff jardinez morenoAún no hay calificaciones
- Estructura Básica de Un ProgramaDocumento8 páginasEstructura Básica de Un ProgramaArturo Martinez PerezAún no hay calificaciones
- Taller Arduino CodigosDocumento14 páginasTaller Arduino CodigosJorgito Valverde SejasAún no hay calificaciones
- Arduino Mega Motor Paso A PasoDocumento15 páginasArduino Mega Motor Paso A PasoJimmy J. Chanduvi GuevaraAún no hay calificaciones
- Informe Programacion Sensor Color ArduinoDocumento6 páginasInforme Programacion Sensor Color ArduinoDaviid RodriguezAún no hay calificaciones
- Guía Taller Internet de Las Cosas PDFDocumento116 páginasGuía Taller Internet de Las Cosas PDFHarold Rodriguez CastilloAún no hay calificaciones
- Ejemplos Con ArduinoDocumento6 páginasEjemplos Con Arduinocesar optimusAún no hay calificaciones
- Ejercicios ARDUINO 2Documento3 páginasEjercicios ARDUINO 2Eduardo NúñezAún no hay calificaciones
- Gas y TemperaturaDocumento4 páginasGas y TemperaturaOllin CastorenaAún no hay calificaciones
- ArduinoDocumento23 páginasArduinoMOLINA IBAÑEZ CELSOAún no hay calificaciones
- Codigos de La TareaDocumento25 páginasCodigos de La TareajhonnyAún no hay calificaciones
- Practicas ArduinoDocumento27 páginasPracticas ArduinoAbbýý SaancheezAún no hay calificaciones
- Ejemplos Con ArduinoDocumento6 páginasEjemplos Con ArduinocesarAún no hay calificaciones
- Diagramas ArduinoDocumento15 páginasDiagramas ArduinoJorge Santiago Cartagena RosalesAún no hay calificaciones
- Sistema Transporte Paciente ArduinoDocumento5 páginasSistema Transporte Paciente ArduinoRaul PerezAún no hay calificaciones
- DocumentoDocumento9 páginasDocumentoArnaldo MachadoAún no hay calificaciones
- Arduino TutorialDocumento58 páginasArduino Tutorialyuyishira100% (2)
- Arduino Control Car V2 byDocumento7 páginasArduino Control Car V2 byedithAún no hay calificaciones
- Arduino Control Car V2 byDocumento7 páginasArduino Control Car V2 byJulio Gomez HernándezAún no hay calificaciones
- Portafolio N°2Documento14 páginasPortafolio N°2Alejandro Joaquín Bejarano RomeroAún no hay calificaciones
- Programas ArduinoDocumento15 páginasProgramas ArduinoDaniel Tenezaca BejaranoAún no hay calificaciones
- Taller 1 IOT Arduino Primer CorteDocumento17 páginasTaller 1 IOT Arduino Primer CorteJohan Andres ARIAS CADAVIDAún no hay calificaciones
- Exercicios de ArduinoDocumento9 páginasExercicios de ArduinoTayssara ElizavietaAún no hay calificaciones
- Control de DirecciónDocumento7 páginasControl de DirecciónAbraham RodriguezAún no hay calificaciones
- CarroDocumento4 páginasCarroGir EstradaAún no hay calificaciones
- Portafolio Nro 2 - Valeria HoyosDocumento12 páginasPortafolio Nro 2 - Valeria HoyosAlejandro Joaquín Bejarano RomeroAún no hay calificaciones
- Lab 11 - ImDocumento17 páginasLab 11 - Imsandy choque matencioAún no hay calificaciones
- Arduino 2Documento4 páginasArduino 2Carlos BaideAún no hay calificaciones
- Presentacion Dado AleatorioDocumento12 páginasPresentacion Dado AleatoriofamiliasanchezaldanaAún no hay calificaciones
- Formato IEEEDocumento8 páginasFormato IEEECristian Eduardo Pacheco AlfonsoAún no hay calificaciones
- Parcial RoboticaDocumento4 páginasParcial RoboticaByron Josel Buitrago MartínezAún no hay calificaciones
- Codigo Arduino PDFDocumento8 páginasCodigo Arduino PDFIvan Lenin Rivera RodriguezAún no hay calificaciones
- Servo 2Documento2 páginasServo 2Brandon Romero ZavalaAún no hay calificaciones
- Laboratorio 1Documento3 páginasLaboratorio 1Kabuto EvangelioAún no hay calificaciones
- IoT Semaforo PDFDocumento2 páginasIoT Semaforo PDFCentro Evolutivo Del SoftwareAún no hay calificaciones
- Informe Taller ArduinoDocumento6 páginasInforme Taller ArduinoJhojan QuevedoAún no hay calificaciones
- IoT Semaforo PDFDocumento2 páginasIoT Semaforo PDFCentro Evolutivo Del SoftwareAún no hay calificaciones
- Informe Arduino1-2Documento17 páginasInforme Arduino1-2Erick Martins Quispe GutierrezAún no hay calificaciones
- 7 Led RGBDocumento8 páginas7 Led RGBLizzbeth DamarisAún no hay calificaciones
- Codigo Arduino Keypad 4X4 Cristhian Perez RoncalDocumento14 páginasCodigo Arduino Keypad 4X4 Cristhian Perez Roncaljanet roncal sueldoAún no hay calificaciones
- CÓDIGO DISPENSADOR DE JABÓN - Ana Karen Mendoza HernandezDocumento2 páginasCÓDIGO DISPENSADOR DE JABÓN - Ana Karen Mendoza HernandezFrancisco EmilioAún no hay calificaciones
- Código Pista de CarrosDocumento2 páginasCódigo Pista de CarrosJhonattan JavierAún no hay calificaciones
- M1H 287003 281535 272016Documento31 páginasM1H 287003 281535 272016Matías CorvettoAún no hay calificaciones
- Detalles HolocausticosDocumento6 páginasDetalles HolocausticosRuth karinaAún no hay calificaciones
- TinkercadDocumento6 páginasTinkercadElla VillelaAún no hay calificaciones
- Guialab2 Eva2 Cidi02Documento6 páginasGuialab2 Eva2 Cidi02Armando OrellanaAún no hay calificaciones
- ArduinoDocumento6 páginasArduinoantonioAún no hay calificaciones
- Arduino Example 1Documento5 páginasArduino Example 1Laura CardenasAún no hay calificaciones
- Proyecto: ConceboxDocumento5 páginasProyecto: ConceboxphipsikAún no hay calificaciones
- Introducción A La Mecatrónica LABORATORIO #11 Señales Analógicas y Comunicación SerialDocumento11 páginasIntroducción A La Mecatrónica LABORATORIO #11 Señales Analógicas y Comunicación Serialsoly santos100% (1)
- Documento AudrinoDocumento30 páginasDocumento AudrinoEthel HaihtAún no hay calificaciones
- Comunicacion UartDocumento9 páginasComunicacion UartDaniel hernandez hernandezAún no hay calificaciones
- Codigo ArduinoDocumento5 páginasCodigo ArduinoJUAN CARLOS CUERO CHAMAPUROAún no hay calificaciones
- Lectura EngranajesDocumento81 páginasLectura EngranajesMarcial Quito SernaquéAún no hay calificaciones
- Transmision Por CadenasDocumento21 páginasTransmision Por CadenasMarcial Quito SernaquéAún no hay calificaciones
- SlveDocumento58 páginasSlveMarcial Quito SernaquéAún no hay calificaciones
- Ud 2 - Consec Proliferac Microorg en AlimentosDocumento32 páginasUd 2 - Consec Proliferac Microorg en AlimentosadsiheAún no hay calificaciones
- Gulf TEC Plus 10W-40 (06.2012)Documento2 páginasGulf TEC Plus 10W-40 (06.2012)David PomaAún no hay calificaciones
- Gestión de Proyectos FUVIDITDocumento18 páginasGestión de Proyectos FUVIDITAndrés E Barrios AAún no hay calificaciones
- Limitadores de Sobre TensionDocumento4 páginasLimitadores de Sobre TensionJorge David SifonteAún no hay calificaciones
- Trabjo 1 Planeamineto RegionalDocumento6 páginasTrabjo 1 Planeamineto RegionaldanielAún no hay calificaciones
- Fernandez Perez MaribelDocumento12 páginasFernandez Perez Maribelbel44077Aún no hay calificaciones
- Informe No 2 de TopografiaDocumento9 páginasInforme No 2 de TopografiaKeylor E. LizanaAún no hay calificaciones
- Nic 37Documento5 páginasNic 37Julio CrisóstomoAún no hay calificaciones
- Parchar PSP Sirve en TODOS Los PSPDocumento3 páginasParchar PSP Sirve en TODOS Los PSPRoberto PérezAún no hay calificaciones
- Factores Bioticos y AbioticosDocumento27 páginasFactores Bioticos y Abioticospocketcita150% (1)
- Guian2ndenAprendizajenSSTnErgonomia 1060f1e1e11d8edDocumento6 páginasGuian2ndenAprendizajenSSTnErgonomia 1060f1e1e11d8edJuan Sebastian Corredor RodriguezAún no hay calificaciones
- La Planificación en La Construcción de Los Poblados Del Instituto Nacional de ColonizaciónDocumento12 páginasLa Planificación en La Construcción de Los Poblados Del Instituto Nacional de ColonizaciónzAún no hay calificaciones
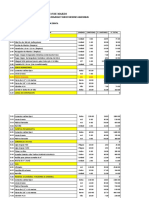
- Pedido de Materiales Chaglla 15-03Documento4 páginasPedido de Materiales Chaglla 15-03DEYLI YURY SAJAMI TELLOAún no hay calificaciones
- Mapa Mental de La EconomiaDocumento1 páginaMapa Mental de La EconomiaLeidy lorena Ruiz sepulvedaAún no hay calificaciones
- Las Redes Del Poder FoucaultDocumento5 páginasLas Redes Del Poder FoucaultFelix JavierAún no hay calificaciones
- Producto Académico 1 - 2023 - 10Documento2 páginasProducto Académico 1 - 2023 - 10Matematica Fisica EstadisticaAún no hay calificaciones
- Informe - Presentacion Del Sistema y El Equipo (Quiroz, Ceballo, Chaparro, Garcia, Depablos)Documento8 páginasInforme - Presentacion Del Sistema y El Equipo (Quiroz, Ceballo, Chaparro, Garcia, Depablos)Carlos Alveiro Ceballo VergaraAún no hay calificaciones
- 02 Prac 03Documento38 páginas02 Prac 03Maira Ruiz NavaAún no hay calificaciones
- Clase - 6 Signos VitalesDocumento57 páginasClase - 6 Signos VitalesCarmen ManchenoAún no hay calificaciones
- Ayuda MemoriaDocumento9 páginasAyuda MemoriaFrankFalconiiAún no hay calificaciones
- HUMIDIFICACIONDocumento59 páginasHUMIDIFICACIONDante KillerAún no hay calificaciones
- Anova KruskalDocumento4 páginasAnova KruskalAndrea PérezAún no hay calificaciones
- 1°reforzamiento de BiologíaDocumento3 páginas1°reforzamiento de Biologíakevin riveracastroAún no hay calificaciones
- 03 Cadenas - DiseñoDocumento53 páginas03 Cadenas - DiseñoRodrigo MamaniAún no hay calificaciones
- Cost Unit GD 2021Documento26 páginasCost Unit GD 2021Cristian QuimizAún no hay calificaciones
- Dmpa 16 - Ensayo Comparativo Entre Huasipungo y Redoble Por RancasDocumento8 páginasDmpa 16 - Ensayo Comparativo Entre Huasipungo y Redoble Por RancasJohana Almerco BernabeAún no hay calificaciones
- Triptico Machaq 2015Documento4 páginasTriptico Machaq 2015loarredondoAún no hay calificaciones
- Ejercicios Autoestudio - Logistica IiDocumento23 páginasEjercicios Autoestudio - Logistica Iijoelrosalese67% (3)
- Test de Evaluacion de La Condicion FisicaDocumento5 páginasTest de Evaluacion de La Condicion Fisicafilcan1975Aún no hay calificaciones