También podría gustarte
- 4 RendimientoDocumento8 páginas4 RendimientogpaganiniAún no hay calificaciones
- Prob 3 TRDocumento3 páginasProb 3 TRJose JerezAún no hay calificaciones
- Modelado Transformador IdealDocumento8 páginasModelado Transformador IdealJordan Moreira ValdezAún no hay calificaciones
- Problemas de Trasformadores 1 de 2Documento11 páginasProblemas de Trasformadores 1 de 2Pablo JaraAún no hay calificaciones
- Modulo 5 Sep 2013iibDocumento45 páginasModulo 5 Sep 2013iibEquis Equis Carry BrincenAún no hay calificaciones
- 12 - Transformador RealDocumento33 páginas12 - Transformador RealCristian SaavedraAún no hay calificaciones
- Semana 2 II SepDocumento33 páginasSemana 2 II SepCm Etcm100% (1)
- Cálculo de La Eficiencia Del Transformador Con Carga Factor de Potencia InductivoDocumento10 páginasCálculo de La Eficiencia Del Transformador Con Carga Factor de Potencia InductivoMonseAún no hay calificaciones
- ReportePráctica2 3Documento9 páginasReportePráctica2 3Angel DiazAún no hay calificaciones
- 2 Cortocircuito en Un TransformadorDocumento5 páginas2 Cortocircuito en Un TransformadorMauro Sebastian RomeroAún no hay calificaciones
- Word TrafosDocumento4 páginasWord TrafosREYNALDO TOLAAún no hay calificaciones
- Laboratorio 1 - Transformador MonofásicoDocumento8 páginasLaboratorio 1 - Transformador MonofásicoJose AntonioAún no hay calificaciones
- 5 Cap TRANSFORMADORES DE MEDIDA PDFDocumento32 páginas5 Cap TRANSFORMADORES DE MEDIDA PDFGonzalo Rodrigo Torrico GutiérrezAún no hay calificaciones
- "El Transformador Monofásico Con Carga": Laboratorio 2Documento12 páginas"El Transformador Monofásico Con Carga": Laboratorio 2Jonathan Alvarado SilvaAún no hay calificaciones
- Entrega 1 ControlDocumento12 páginasEntrega 1 Controldanilo ernesto niño torresAún no hay calificaciones
- Transformadores de Medida CorregidoDocumento32 páginasTransformadores de Medida Corregidoreynaldo100% (1)
- Eficiencia Trafo3Documento6 páginasEficiencia Trafo3Nico VivancoAún no hay calificaciones
- 4-3 Transformadores MonofasicosDocumento6 páginas4-3 Transformadores MonofasicosAlejandro Enriquez NajeraAún no hay calificaciones
- 2.ensayos en Un TransformadorDocumento13 páginas2.ensayos en Un TransformadorSebastian Valenzuela01Aún no hay calificaciones
- Transformadores ElectricosDocumento10 páginasTransformadores ElectricosJuan TLAún no hay calificaciones
- Preparatorio2 Guerrero ViteriDocumento6 páginasPreparatorio2 Guerrero ViteriAlvaro EspinozaAún no hay calificaciones
- Laboratorio 2 - Eficiencia y RegulaciónDocumento13 páginasLaboratorio 2 - Eficiencia y RegulaciónGiancarlosValladaresVentura100% (1)
- Preparatorio 2 - Romero A - Zambrano JDocumento5 páginasPreparatorio 2 - Romero A - Zambrano JANGEL ADRIAN ROMERO DUE�ASAún no hay calificaciones
- Actividad 19. CAIDA DE TENSION EN UN TRANSFORMADORDocumento7 páginasActividad 19. CAIDA DE TENSION EN UN TRANSFORMADORruby ruiz portalAún no hay calificaciones
- Ud 2 Conceptos Basicos y Problemas ResueltosDocumento13 páginasUd 2 Conceptos Basicos y Problemas ResueltosJesua UribeAún no hay calificaciones
- Laboratorio 2 - Eficiencia y RegulaciónDocumento12 páginasLaboratorio 2 - Eficiencia y RegulaciónMisael Asto100% (1)
- El Trasnformador MonofasicoDocumento6 páginasEl Trasnformador MonofasicoEddu QuispeAún no hay calificaciones
- 6 140613085926 Phpapp02 PDFDocumento13 páginas6 140613085926 Phpapp02 PDFgusAún no hay calificaciones
- Ensayo Con Carga para Determinar La Eficiencia en El Transformador de Potencia MonofasicoDocumento17 páginasEnsayo Con Carga para Determinar La Eficiencia en El Transformador de Potencia MonofasicoLuis Fernando Merma DurandAún no hay calificaciones
- Transformador - Fase 2Documento18 páginasTransformador - Fase 2KennyParedesAún no hay calificaciones
- Electromecánica de La Energía 1Documento13 páginasElectromecánica de La Energía 1Claudio Valdes GutierrezAún no hay calificaciones
- Laboratorio de MaquinasDocumento11 páginasLaboratorio de MaquinasKevin Tintaya VargasAún no hay calificaciones
- Analisis de Circuitos Electricos IIDocumento24 páginasAnalisis de Circuitos Electricos IIKarim Merino ObleaAún no hay calificaciones
- Universidad Tecnológica Nacional Facultad Regional CórdobaDocumento14 páginasUniversidad Tecnológica Nacional Facultad Regional CórdobaAlvaro MoralesAún no hay calificaciones
- 15 - El TransformadorDocumento3 páginas15 - El TransformadorAslam CanoAún no hay calificaciones
- Sesion 2.1. El Transformador Ideal 2016 IIDocumento6 páginasSesion 2.1. El Transformador Ideal 2016 IIArteaga BacilioAún no hay calificaciones
- Trabajo Nro 1, Conversor BUCKDocumento6 páginasTrabajo Nro 1, Conversor BUCKGEORGE HENDER MORALES FUENTESAún no hay calificaciones
- Informe 4 Laboratorio de Circuitos Eléctricos I FIM UNIDocumento18 páginasInforme 4 Laboratorio de Circuitos Eléctricos I FIM UNIMateo BarreraAún no hay calificaciones
- Choper DC de Un CuadranteDocumento8 páginasChoper DC de Un CuadrantePablo AmbrosiAún no hay calificaciones
- Ensayo Indirecto en TransformadoresDocumento17 páginasEnsayo Indirecto en TransformadoresCristian Ariel FrancoAún no hay calificaciones
- 5 Cap Transformadores de Medida Corregido Abril 2021Documento32 páginas5 Cap Transformadores de Medida Corregido Abril 2021Martinez Ramos Michael ErickAún no hay calificaciones
- BT006-Efectos de Un Bajo FDP y Su Compensacion PDFDocumento8 páginasBT006-Efectos de Un Bajo FDP y Su Compensacion PDFRoly DuarteAún no hay calificaciones
- 8.medición de Energía Electrica PDFDocumento13 páginas8.medición de Energía Electrica PDFoscarAún no hay calificaciones
- Lab 4Documento11 páginasLab 4Cesar Paiva Rivera100% (1)
- Troceador ReversibleDocumento30 páginasTroceador Reversiblemarco8655Aún no hay calificaciones
- Marclé TFI EI2022Documento22 páginasMarclé TFI EI2022Emiliano MarcléAún no hay calificaciones
- Experimento N°5Documento10 páginasExperimento N°5andojiAún no hay calificaciones
- Rectificador PDFDocumento12 páginasRectificador PDFAle ZamAún no hay calificaciones
- Laboratorio N6Documento5 páginasLaboratorio N6HectorVasquezLaraAún no hay calificaciones
- Generador de Onda QuadradaDocumento9 páginasGenerador de Onda QuadradaJordy Tmpr HtcAún no hay calificaciones
- Laboratorio de Transformador MonofasicoDocumento27 páginasLaboratorio de Transformador MonofasicoJefferson YllaconzaAún no hay calificaciones
- Rt1 Trans. MonofasicosDocumento15 páginasRt1 Trans. MonofasicosAlejandro ValdezAún no hay calificaciones
- Tp12-Ensayo de Transformador MonofasicoDocumento15 páginasTp12-Ensayo de Transformador MonofasicolautaroAún no hay calificaciones
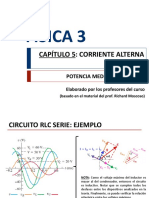
- Fisica 3: Capítulo 5: Corriente AlternaDocumento25 páginasFisica 3: Capítulo 5: Corriente AlternaLUIS ENRIQUE JARA CIEZAAún no hay calificaciones
- Trabajo de Transformador Real PDFDocumento12 páginasTrabajo de Transformador Real PDFpablo sfafdAún no hay calificaciones
- 2.rendimiento de Un Transf.Documento8 páginas2.rendimiento de Un Transf.LoanAún no hay calificaciones
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Experiencias sobre circuitos eléctricos en serie operados por corriente directaDe EverandExperiencias sobre circuitos eléctricos en serie operados por corriente directaAún no hay calificaciones
- Problemas resueltos de Hidráulica de CanalesDe EverandProblemas resueltos de Hidráulica de CanalesCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Guía 5. Capacidad p2Documento2 páginasGuía 5. Capacidad p2juanpere100% (1)
- Practica de Laboratorio Transformadores UlloaDocumento8 páginasPractica de Laboratorio Transformadores UlloaWilliam ulloaAún no hay calificaciones
- Leyes - de - Kirchhoff20200519 84014 3f6yxn With Cover Page v2Documento7 páginasLeyes - de - Kirchhoff20200519 84014 3f6yxn With Cover Page v2Aetos AthánatosAún no hay calificaciones
- Tabla de Errores Mas ComunesDocumento5 páginasTabla de Errores Mas ComunesBrianEsteban67% (3)
- Alto Horno y Horno Electrico Alejandro PomaDocumento20 páginasAlto Horno y Horno Electrico Alejandro PomaAlejandro Poma VillarrealAún no hay calificaciones
- TPS 233 12108219 20231Documento23 páginasTPS 233 12108219 20231INVERSIONES AMBIENTALES MLNS C.A.Aún no hay calificaciones
- 01 Manual de Fallas PHDocumento111 páginas01 Manual de Fallas PHJaime Cataldo100% (5)
- Circuitos Eléctricos IiDocumento5 páginasCircuitos Eléctricos IiCesar AraujoAún no hay calificaciones
- Practica 2 (Calibracion Term Op Ares y Termorresistencial) PNFDocumento8 páginasPractica 2 (Calibracion Term Op Ares y Termorresistencial) PNFJoaura Jakeline Romero Alvarez100% (1)
- Ley de FaradayDocumento5 páginasLey de FaradayIVEA TLALIXCOYANAún no hay calificaciones
- Amplificadores MultietapasDocumento6 páginasAmplificadores MultietapasLuis Eduardo Ramírez CarvajalAún no hay calificaciones
- 4° Sec Física - #6Documento3 páginas4° Sec Física - #6Rocio CalderónAún no hay calificaciones
- SILABO - Análisis de Fallas en Sistemas Eléctricos de PotenciaDocumento3 páginasSILABO - Análisis de Fallas en Sistemas Eléctricos de PotenciaJimmy Benites EspinozaAún no hay calificaciones
- Electrotecnia Laboratorio 1Documento14 páginasElectrotecnia Laboratorio 1Jare LunaAún no hay calificaciones
- Reporte 1 Equipo ElectricoDocumento15 páginasReporte 1 Equipo ElectricoBruno VelazquezAún no hay calificaciones
- Circuitos EléctricosDocumento12 páginasCircuitos EléctricosAldo Jiménez Regis0% (1)
- Ficha Técnica - SLCS - Talede PlusDocumento7 páginasFicha Técnica - SLCS - Talede PlusJoseFerneyVelandiaDiazAún no hay calificaciones
- Practico #3Documento2 páginasPractico #3JulienAún no hay calificaciones
- Informe Lab 8 Semana 10Documento25 páginasInforme Lab 8 Semana 10Yunobi Luis Moreno esquivelAún no hay calificaciones
- Puesta de Fuera de Tensión de Vehículos EléctricosDocumento12 páginasPuesta de Fuera de Tensión de Vehículos Eléctricospatricoherrera115Aún no hay calificaciones
- Manual AutronicsDocumento2 páginasManual AutronicsJAIRSAN1100% (1)
- Cap II Tipos de LamparasDocumento15 páginasCap II Tipos de LamparasShineferAún no hay calificaciones
- ANTENASDocumento53 páginasANTENASDesconocido GatewayAún no hay calificaciones
- Clase 3 Inspección VisualDocumento21 páginasClase 3 Inspección VisualAna Maria PerezAún no hay calificaciones
- Proyecto Tipo Redes Aereas de Media Tension Forradas Sin NeutroDocumento683 páginasProyecto Tipo Redes Aereas de Media Tension Forradas Sin NeutroSupervisor de Mantenimiento - Etapa SarriáAún no hay calificaciones
- Regulacion de VoltajeDocumento32 páginasRegulacion de VoltajeChristian PizanánAún no hay calificaciones
- AMPERIMETRODocumento22 páginasAMPERIMETROMaryJo SolannaAún no hay calificaciones
- Memoria de CalculosDocumento9 páginasMemoria de Calculosjhon0411Aún no hay calificaciones
- Electronica1 Lab4Documento17 páginasElectronica1 Lab4Juan Carlos MartinezAún no hay calificaciones