También podría gustarte
- Modulacion Angular Tarea 3Documento8 páginasModulacion Angular Tarea 3kevin narvaez henriquezAún no hay calificaciones
- Lab Comunicaciones LLDocumento5 páginasLab Comunicaciones LLMaria Camila LoraAún no hay calificaciones
- Ruiz Nathaly Gabriela Guamanarca CO Tarea Redes DifraccionDocumento5 páginasRuiz Nathaly Gabriela Guamanarca CO Tarea Redes DifraccionNaty RuizAún no hay calificaciones
- Guía No. 2 Laboratorio de FMDocumento13 páginasGuía No. 2 Laboratorio de FMSebastian GonzalezAún no hay calificaciones
- Estudio Comparativo ZF y MMSEDocumento17 páginasEstudio Comparativo ZF y MMSECristian EscorciaAún no hay calificaciones
- Beamforming GonzaloS PDFDocumento35 páginasBeamforming GonzaloS PDFMarco Aurelio Ordoñez OrdoñezAún no hay calificaciones
- AskDocumento11 páginasAskGian ErrivaresAún no hay calificaciones
- Informe 3Documento7 páginasInforme 3Ronald Eduardo Barreto CallisayaAún no hay calificaciones
- Medios de Enlace Cuestionario-V.1.2Documento54 páginasMedios de Enlace Cuestionario-V.1.2Noddles27Aún no hay calificaciones
- Bernard Sklar V2 (Traducido) PDFDocumento12 páginasBernard Sklar V2 (Traducido) PDFExequiel Arancibia Lopez100% (1)
- Resumen Modelos de PropagaciónDocumento31 páginasResumen Modelos de PropagaciónJavier Chiliquinga SalazarAún no hay calificaciones
- Manual Curso CasaDocumento11 páginasManual Curso CasaRamses Jerez NicurcarAún no hay calificaciones
- Cristian Mejia-grupo#9-Tarea 6Documento21 páginasCristian Mejia-grupo#9-Tarea 6David SalcedoAún no hay calificaciones
- Lab 2 - Medición de Parametros Thiele-Small Del ParlanteDocumento8 páginasLab 2 - Medición de Parametros Thiele-Small Del ParlanteCristian VargasAún no hay calificaciones
- Informe Previo 4Documento16 páginasInforme Previo 4Marco Jaramillo OrtegaAún no hay calificaciones
- Simulación de Modulación AM en Octave-ReporteDocumento3 páginasSimulación de Modulación AM en Octave-ReporteFlavio Cesar Martinez HernandezAún no hay calificaciones
- Longitud de Onda LaserDocumento6 páginasLongitud de Onda Laserカリイオ ヘクトルAún no hay calificaciones
- 1 Retos de Las Comunicaciones InalámbricasDocumento40 páginas1 Retos de Las Comunicaciones InalámbricasedgarllanoAún no hay calificaciones
- Comparacion Okumura Hata y Espacio LibreDocumento9 páginasComparacion Okumura Hata y Espacio LibreMacarena FloresAún no hay calificaciones
- PDF Argonzaleztpoligraneduco 1 Investigue y Realice Un Cuadro Con Los Diferentes Tipos de ModulacionDocumento7 páginasPDF Argonzaleztpoligraneduco 1 Investigue y Realice Un Cuadro Con Los Diferentes Tipos de ModulacionJhon Alexander Herrera0% (1)
- Modulaciones AnalógicasDocumento13 páginasModulaciones AnalógicasMilena RodriguezAún no hay calificaciones
- Fase 2 - Omar GomezDocumento9 páginasFase 2 - Omar GomezpicotoAún no hay calificaciones
- Diseño de Dipolos Sencillos y de Banda AnchaDocumento7 páginasDiseño de Dipolos Sencillos y de Banda AnchaAlbeiro NúñezAún no hay calificaciones
- Fase 3Documento19 páginasFase 3maryanna merchanAún no hay calificaciones
- Modulación de Amplitud (Am) : Ing. Alexis Barrios Ulloa MSCDocumento27 páginasModulación de Amplitud (Am) : Ing. Alexis Barrios Ulloa MSCRhenato SierraAún no hay calificaciones
- Análisis de Pérdidas en Cable Coaxial para MicroondasDocumento10 páginasAnálisis de Pérdidas en Cable Coaxial para MicroondasYenifer RicardoAún no hay calificaciones
- Implementacion Del Detector de Bordes de Canny Sob PDFDocumento5 páginasImplementacion Del Detector de Bordes de Canny Sob PDFMaycol SanchezAún no hay calificaciones
- Grupo25 Fase3.Documento14 páginasGrupo25 Fase3.FABIAN SANCHEZAún no hay calificaciones
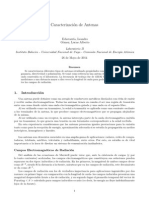
- Caracterización de Una Antena de Tipo DipoloDocumento10 páginasCaracterización de Una Antena de Tipo DipoloLeandroEchevarríaAún no hay calificaciones
- Informatica GarciaDocumento45 páginasInformatica GarciaPedroAún no hay calificaciones
- David Motta Grupo19 Fase 3Documento40 páginasDavid Motta Grupo19 Fase 3David MttsAún no hay calificaciones
- Practica2 KAZPDocumento9 páginasPractica2 KAZPKarime OlaAún no hay calificaciones
- Vega - Diana - Modulacion Angular Con Ruido 1Documento19 páginasVega - Diana - Modulacion Angular Con Ruido 1Diana VegaAún no hay calificaciones
- Trabajo Academico de Conectividad y Transmision de Datos - ArohuancaDocumento24 páginasTrabajo Academico de Conectividad y Transmision de Datos - Arohuancateylor arohuancaAún no hay calificaciones
- 678-700 LineasDocumento25 páginas678-700 LineasOwen CBAún no hay calificaciones
- Laboratorio de Radiopropagacion SDCO Cortes y MontoyaDocumento26 páginasLaboratorio de Radiopropagacion SDCO Cortes y MontoyaJulian Camilo Casas JimenezAún no hay calificaciones
- Practica 1Documento9 páginasPractica 1sanyAún no hay calificaciones
- DipoloDocumento13 páginasDipoloLina MariaAún no hay calificaciones
- Practica 06 - Sistema de TX Por FO Con Modulacion Externa y PAM4 (VP)Documento20 páginasPractica 06 - Sistema de TX Por FO Con Modulacion Externa y PAM4 (VP)Andy NavasAún no hay calificaciones
- Antena LogaritmicaDocumento17 páginasAntena LogaritmicaCarlos Camacho PerezAún no hay calificaciones
- Informe FMDocumento8 páginasInforme FMlaura tbonAún no hay calificaciones
- Simulacion HFSS v2Documento27 páginasSimulacion HFSS v2DIAZ ROJAS MARLON ESTEBAN100% (1)
- ELO241 Experiencia 3Documento32 páginasELO241 Experiencia 3Dave Nicolás Constantino Figueroa OssesAún no hay calificaciones
- Modelos Propagacion Deber1Documento13 páginasModelos Propagacion Deber1Diego LópezAún no hay calificaciones
- Planificacion Radioenlace Cartografia DigitalDocumento6 páginasPlanificacion Radioenlace Cartografia DigitalLuis Alberto Duque SánchezAún no hay calificaciones
- Informe9 Anal Gicas SSBDocumento7 páginasInforme9 Anal Gicas SSBLaura GonzalezAún no hay calificaciones
- Modulacion Am - GnuradioDocumento21 páginasModulacion Am - GnuradioRocio Crisostomo ParejasAún no hay calificaciones
- Bernard Sklar V2 (Traducido) PDFDocumento12 páginasBernard Sklar V2 (Traducido) PDFgtapiaalAún no hay calificaciones
- Camilomendez - Tarea - 2Documento12 páginasCamilomendez - Tarea - 2camilo alejandro mendez ramirezAún no hay calificaciones
- Estudio de Propagacion CompletoDocumento37 páginasEstudio de Propagacion Completoimblackstar100% (2)
- MovilesDocumento6 páginasMovilessebastian ruizAún no hay calificaciones
- Exposición 3.2.1, 3.3 y 3.3.1Documento30 páginasExposición 3.2.1, 3.3 y 3.3.1Nadia Cruz SantiagoAún no hay calificaciones
- Copia de LabLineasEspectralesDocumento6 páginasCopia de LabLineasEspectralesLAURA ISABELA ACOSTA ORTEGAAún no hay calificaciones
- Simulacion HFSS v1Documento25 páginasSimulacion HFSS v1DIAZ ROJAS MARLON ESTEBANAún no hay calificaciones
- Propagacionokumura HataDocumento6 páginasPropagacionokumura HataAleix EsparciaAún no hay calificaciones
- 1 - 01 Ondas ElectromagnéticasDocumento12 páginas1 - 01 Ondas ElectromagnéticasGonzalo SalesAún no hay calificaciones
- Problemas resueltos de electromagnetismo. Volumen I: ElectrostáticaDe EverandProblemas resueltos de electromagnetismo. Volumen I: ElectrostáticaAún no hay calificaciones
- Rosa Francisca Ibáñez-Alfaro: CorrespondenciaDocumento19 páginasRosa Francisca Ibáñez-Alfaro: CorrespondenciaEumar AntillanoAún no hay calificaciones
- Estudio Topografico JitaDocumento7 páginasEstudio Topografico Jitasamuco777Aún no hay calificaciones
- Actividad Mircoles y Jueves 6,7 AbrilDocumento10 páginasActividad Mircoles y Jueves 6,7 AbrilYanetAún no hay calificaciones
- Cultura MocheDocumento54 páginasCultura MocheMilnert Vp100% (1)
- Principio de OrganizaciónDocumento4 páginasPrincipio de OrganizaciónMichelle CamayoAún no hay calificaciones
- Reactividad de MetalesDocumento7 páginasReactividad de MetalesKarla Valderrama CardozoAún no hay calificaciones
- Medicion RecalentamientoDocumento3 páginasMedicion Recalentamientoaucadenas100% (12)
- Procedimiento Aplicacion de PagosDocumento1 páginaProcedimiento Aplicacion de PagosSonia Castro CastellanosAún no hay calificaciones
- Para Optar Al Título de Ingeniero CivilDocumento279 páginasPara Optar Al Título de Ingeniero CivilJonathan GutiérrezAún no hay calificaciones
- Isoinmunización de GrupoDocumento2 páginasIsoinmunización de GrupoCarlos MillanAún no hay calificaciones
- Trabajo de Monfragüe (Cáceres)Documento10 páginasTrabajo de Monfragüe (Cáceres)Soufian NadifAún no hay calificaciones
- Calendario Mexico 2023 05Documento1 páginaCalendario Mexico 2023 05Diana OrtegaAún no hay calificaciones
- Taller Incoterms PDFDocumento2 páginasTaller Incoterms PDFSandra BerdugoAún no hay calificaciones
- Estado Hiperosmolar Hiperglicemico ESDocumento15 páginasEstado Hiperosmolar Hiperglicemico ESbboyhelyAún no hay calificaciones
- Marketing - Sesión 8 - 2020Documento22 páginasMarketing - Sesión 8 - 2020NancyRodriguezAún no hay calificaciones
- Calculo Isc Guía para El Ets Junio 21Documento16 páginasCalculo Isc Guía para El Ets Junio 21Axel TorresAún no hay calificaciones
- AGENDA EstadNegocios JulSep2013 BANDocumento9 páginasAGENDA EstadNegocios JulSep2013 BANRa LauAún no hay calificaciones
- ACTIVIDAD 1 DEL MODULO CONTROVERSIA, SE VAN LOS CARNIVOROS (Primera Parte) Luis Rangel 1104Documento3 páginasACTIVIDAD 1 DEL MODULO CONTROVERSIA, SE VAN LOS CARNIVOROS (Primera Parte) Luis Rangel 1104luis eduardo rangel sotoAún no hay calificaciones
- DOC1Documento5 páginasDOC1Guillermo Marcelo Badillo MuñozAún no hay calificaciones
- Lógicas de Proyecto Roberto FernándezDocumento4 páginasLógicas de Proyecto Roberto FernándezVictoria Pintos0% (3)
- Viii Experiencia de Aprendizaje - Act 3 - 1 y 2 GradoDocumento5 páginasViii Experiencia de Aprendizaje - Act 3 - 1 y 2 GradoHeber ApazaAún no hay calificaciones
- Misión ChiriquíDocumento27 páginasMisión ChiriquíMarleny YiselAún no hay calificaciones
- Tarea GRHDocumento2 páginasTarea GRHAdrian Tello OrellanaAún no hay calificaciones
- PRACTICA Identificacion Carbohidratos 2 BRIAN VELADocumento7 páginasPRACTICA Identificacion Carbohidratos 2 BRIAN VELACristinaAún no hay calificaciones
- 4-Teorã A-Proposiciones Subordinadas SustantivasDocumento26 páginas4-Teorã A-Proposiciones Subordinadas SustantivasMarioAún no hay calificaciones
- Sistema de Acumulación de CostosDocumento8 páginasSistema de Acumulación de CostosVeronica DazaAún no hay calificaciones
- 513 Urvan Ficha TecnicaDocumento2 páginas513 Urvan Ficha TecnicaJose Ignacio Alvarez ChavezAún no hay calificaciones
- Parrafo AmericaDocumento1 páginaParrafo AmericaAKD ArquitecturaAún no hay calificaciones
- Diseña Tu Éxito 2022Documento49 páginasDiseña Tu Éxito 2022Andrea RodriguezAún no hay calificaciones
- Tradiciones Culturales.: Las Tradiciones de JuchitánDocumento3 páginasTradiciones Culturales.: Las Tradiciones de JuchitánYo SAún no hay calificaciones