También podría gustarte
- Trabajo Grupal Minería de Datos Semana 10Documento4 páginasTrabajo Grupal Minería de Datos Semana 10Raquel GodoyAún no hay calificaciones
- 3X1 Adicionales Ejercicion1Documento16 páginas3X1 Adicionales Ejercicion1JHAN FRAGOZZOAún no hay calificaciones
- Formato Matriz de Identificación de Peligros, Valoración de Riesgos y Determinación de Controles V1Documento54 páginasFormato Matriz de Identificación de Peligros, Valoración de Riesgos y Determinación de Controles V1ANGELA VIVIANA CAICEDO GALLEGOAún no hay calificaciones
- Certificado Estado Cedula 1065830541Documento1 páginaCertificado Estado Cedula 1065830541JHAN FRAGOZZOAún no hay calificaciones
- Formato Matriz de Identificación de Peligros, Valoración de Riesgos y Determinación de Controles V1Documento54 páginasFormato Matriz de Identificación de Peligros, Valoración de Riesgos y Determinación de Controles V1ANGELA VIVIANA CAICEDO GALLEGOAún no hay calificaciones
- Formato Matriz de Identificación de Peligros, Valoración de Riesgos y Determinación de Controles V1Documento54 páginasFormato Matriz de Identificación de Peligros, Valoración de Riesgos y Determinación de Controles V1ANGELA VIVIANA CAICEDO GALLEGOAún no hay calificaciones
- Certificado Estado Cedula 1065830541Documento1 páginaCertificado Estado Cedula 1065830541JHAN FRAGOZZOAún no hay calificaciones
- Formato Matriz de Identificación de Peligros, Valoración de Riesgos y Determinación de Controles V1Documento54 páginasFormato Matriz de Identificación de Peligros, Valoración de Riesgos y Determinación de Controles V1ANGELA VIVIANA CAICEDO GALLEGOAún no hay calificaciones
- Evaluación C2Documento8 páginasEvaluación C2jyrusinkeAún no hay calificaciones
- BARFIELD User-Instruction-Manual-DPS-350Documento75 páginasBARFIELD User-Instruction-Manual-DPS-350Edwin D. Mora GuerreroAún no hay calificaciones
- Acuerdo Pedagógico Institucional. Cs. Naturales y Lengua (2021-2022) Capacitación - Nueva EscuelaDocumento2 páginasAcuerdo Pedagógico Institucional. Cs. Naturales y Lengua (2021-2022) Capacitación - Nueva EscuelaLeonardoAún no hay calificaciones
- 1.-Aportaciones Foro 1Documento3 páginas1.-Aportaciones Foro 1Mangas Steve AustinAún no hay calificaciones
- Unidad 3Documento5 páginasUnidad 3elian SánchezAún no hay calificaciones
- Avance 1 Investigacion de Mercados IDocumento3 páginasAvance 1 Investigacion de Mercados IBryan Flores100% (1)
- CV Mirella Irina Tu Me LópezDocumento3 páginasCV Mirella Irina Tu Me LópezImperium ConsultoresAún no hay calificaciones
- Practica 4 - Condicionantes MIENTRASDocumento1 páginaPractica 4 - Condicionantes MIENTRASMARCELO MIGUEL NINAYA SALAZARAún no hay calificaciones
- Manual enrolamiento Airwatch CN51Documento35 páginasManual enrolamiento Airwatch CN51Omar PerezAún no hay calificaciones
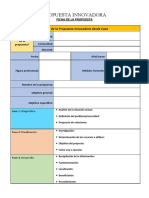
- Propuesta innovadora desde casaDocumento2 páginasPropuesta innovadora desde casaPaulethe Cordova100% (1)
- Información de La Presentación de La Declaración Modelo 100 Ejercicio 2022Documento6 páginasInformación de La Presentación de La Declaración Modelo 100 Ejercicio 2022Redwane BouknifyAún no hay calificaciones
- Manual de Auditoria IntegralDocumento32 páginasManual de Auditoria IntegralTayd Medaly Chanca DE LA MattaAún no hay calificaciones
- Liderazgo asertivo y comunicación efectivaDocumento14 páginasLiderazgo asertivo y comunicación efectivaXiomara RodriguezAún no hay calificaciones
- Sociologia Del Trabajao - El Capitalismo en La Era Del BigDataDocumento1 páginaSociologia Del Trabajao - El Capitalismo en La Era Del BigDataFrederick Díaz MejíaAún no hay calificaciones
- JactayDocumento31 páginasJactayRAUL MENDOZA VALVERDEAún no hay calificaciones
- Examen - (AAB02) Cuestionario 1 - Analizar y Resolver Ejercicios Relacionados A La Terminología de ÁrbolesDocumento6 páginasExamen - (AAB02) Cuestionario 1 - Analizar y Resolver Ejercicios Relacionados A La Terminología de ÁrbolesalexAún no hay calificaciones
- Exposicion AddiDocumento8 páginasExposicion AddiEdwin Ferney Ruiz CameloAún no hay calificaciones
- P 4 Fernandez Milton MTRDocumento17 páginasP 4 Fernandez Milton MTRMiltonAún no hay calificaciones
- Ley Especial Contra Los Delitos InformaticosDocumento35 páginasLey Especial Contra Los Delitos InformaticosIvan JoeAún no hay calificaciones
- Foro 1 - Andrea FloresDocumento4 páginasForo 1 - Andrea FloresAndrea FloresAún no hay calificaciones
- EDAI10 ArbolesDocumento26 páginasEDAI10 ArbolesAlejandro Garcia GonzalezAún no hay calificaciones
- Brochure I RideDocumento32 páginasBrochure I RideAndres JimenezAún no hay calificaciones
- U3 Aa2 Tarea Objetivos e HipótesisDocumento2 páginasU3 Aa2 Tarea Objetivos e HipótesisMiriam LemaAún no hay calificaciones
- Taller Semana1Documento3 páginasTaller Semana1Daniela Carrillo PabónAún no hay calificaciones
- Cotizacion Servicios 2023Documento1 páginaCotizacion Servicios 2023Magno Nayhua CharcaAún no hay calificaciones
- Análisis de experimentos y diseños con intervalos de confianzaDocumento6 páginasAnálisis de experimentos y diseños con intervalos de confianzajuanpamaestreAún no hay calificaciones
- Tarea 6Documento6 páginasTarea 6Ricardito PanaifoAún no hay calificaciones
- Silabo EticaProfesionalDocumento7 páginasSilabo EticaProfesionalJean Pierre AgurtoAún no hay calificaciones
- Mantenimiento industrial: apuntes completos sobre conceptos, técnicas y responsabilidadesDocumento17 páginasMantenimiento industrial: apuntes completos sobre conceptos, técnicas y responsabilidadesLizeth GAún no hay calificaciones