También podría gustarte
- Problemas resueltos de Hidráulica de CanalesDe EverandProblemas resueltos de Hidráulica de CanalesCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Práctica de La Turbina PeltonDocumento6 páginasPráctica de La Turbina PeltonJuan Jose San Martin AlfaroAún no hay calificaciones
- Ata 24Documento106 páginasAta 24jorge100% (2)
- P5-G1 AC Labo 5Documento10 páginasP5-G1 AC Labo 5Mauricio CortezAún no hay calificaciones
- Informe #5 Cupla Como Funcion de La Tension Del EstatorDocumento11 páginasInforme #5 Cupla Como Funcion de La Tension Del EstatorSamuel Valverde RiosAún no hay calificaciones
- INF 5 Maquinas AcDocumento5 páginasINF 5 Maquinas AcALEX LOPEZ ESPINOZAAún no hay calificaciones
- Informe 4Documento7 páginasInforme 4Javier Mamani RamosAún no hay calificaciones
- Ac Prac 5Documento6 páginasAc Prac 5Favio Junior Mamani Rodriguez100% (1)
- Laboratorio N4Documento7 páginasLaboratorio N4Victor Alfredo Rios ChoqueAún no hay calificaciones
- Labo Maquinas AC-Informe 4 - NoDocumento5 páginasLabo Maquinas AC-Informe 4 - NoEdson Arroyo CondoriAún no hay calificaciones
- Informe 4 Maquinas ACDocumento6 páginasInforme 4 Maquinas ACJulio AlmanzaAún no hay calificaciones
- Datos ExperimentalesDocumento3 páginasDatos ExperimentalesCrister MijahuancaAún no hay calificaciones
- P4-G1 AC Labo 4Documento11 páginasP4-G1 AC Labo 4Mauricio CortezAún no hay calificaciones
- P2-G1 AC Labo 2Documento9 páginasP2-G1 AC Labo 2Mauricio CortezAún no hay calificaciones
- Lab 4Documento7 páginasLab 4Allen WalkerAún no hay calificaciones
- LAB#6 Maquinas ACDocumento6 páginasLAB#6 Maquinas ACAlejandro OchoaAún no hay calificaciones
- Universidad Mayor de San Simon Facultad de Ciencias Y Tecnología Laboratorio de Maquinas Ac Informe de Laboratorio #2Documento5 páginasUniversidad Mayor de San Simon Facultad de Ciencias Y Tecnología Laboratorio de Maquinas Ac Informe de Laboratorio #2HAROLD SERGIO ORELLANA MONTAÑOAún no hay calificaciones
- Ejercicio Estadistica - Clase (Resuelto)Documento9 páginasEjercicio Estadistica - Clase (Resuelto)José Alezandro Aguilar ValenzuelaAún no hay calificaciones
- Informe de Laboratorio Analisis de ResultadosDocumento6 páginasInforme de Laboratorio Analisis de ResultadosEdwin GuzmánAún no hay calificaciones
- Lab1 20191019Documento3 páginasLab1 20191019santiago rodriguezAún no hay calificaciones
- Lab. N°3 Maquinas AsincronicasDocumento8 páginasLab. N°3 Maquinas AsincronicasLUIS CAEROAún no hay calificaciones
- Informe 2 Maquinas ACDocumento8 páginasInforme 2 Maquinas ACJulio AlmanzaAún no hay calificaciones
- Informe 2 Maquinas ACDocumento8 páginasInforme 2 Maquinas ACJulio AlmanzaAún no hay calificaciones
- Cupla Como Función de La Tensión Del EstatorDocumento7 páginasCupla Como Función de La Tensión Del EstatorMelisa Maldonado100% (1)
- Regulación de Motores de InducciónDocumento6 páginasRegulación de Motores de InducciónjhonatanAún no hay calificaciones
- 3 RemovedDocumento19 páginas3 RemovedCIRO VLADIMIR MARTINEZ AGUILARAún no hay calificaciones
- Informe Banco de Bombas FinalDocumento20 páginasInforme Banco de Bombas Finalsusana rendonAún no hay calificaciones
- Analisis de Varianza Ok.Documento3 páginasAnalisis de Varianza Ok.Augusto Israel Solares RosalesAún no hay calificaciones
- Informe Laboratorio Maquinas Electricas - ENSAYO DE CORTO CIRCUITO DE TRANSFORMADORESDocumento11 páginasInforme Laboratorio Maquinas Electricas - ENSAYO DE CORTO CIRCUITO DE TRANSFORMADORESDIAZ CUBA ROGER JEANPOOLAún no hay calificaciones
- LAB3 MagDocumento9 páginasLAB3 MagYesid Oscar Chambi CáceresAún no hay calificaciones
- Ejercicios Pruebas de PresiónDocumento22 páginasEjercicios Pruebas de PresiónCruz San AmeAún no hay calificaciones
- Ensayo Completo de Una Bomba CentrifugaDocumento11 páginasEnsayo Completo de Una Bomba CentrifugaLuis Miguel LnAún no hay calificaciones
- Reporte Practica 9Documento6 páginasReporte Practica 9AlfredoAún no hay calificaciones
- Practica 4Documento5 páginasPractica 4Andres Rodrigo Crespo CocaAún no hay calificaciones
- Aincronas 4Documento8 páginasAincronas 4Antonio ArispeAún no hay calificaciones
- Informe 2 Determinacion de Perdidas Mecanicas y MagneticasDocumento8 páginasInforme 2 Determinacion de Perdidas Mecanicas y MagneticasAlfredo Mamangueño FloresAún no hay calificaciones
- Laboratorio #2Documento7 páginasLaboratorio #2Lenny Rayssa Huayllas CalaniAún no hay calificaciones
- Taller Energia Especifica-Flujo Crítico - Sonia ZarazaDocumento6 páginasTaller Energia Especifica-Flujo Crítico - Sonia ZarazaSonia Smith Zaraza ReyesAún no hay calificaciones
- Laboratorio Virtual Maquinas H.Documento11 páginasLaboratorio Virtual Maquinas H.Juan Camilo Rios RomeroAún no hay calificaciones
- Universidad Mayor de San Simón Otra Practica 6Documento6 páginasUniversidad Mayor de San Simón Otra Practica 6Alejandro OchoaAún no hay calificaciones
- Practica 6-1Documento7 páginasPractica 6-1Andres Rodrigo Crespo CocaAún no hay calificaciones
- Laboratorio Turbinas Pelton GH 01LDocumento5 páginasLaboratorio Turbinas Pelton GH 01LPaul SalasAún no hay calificaciones
- Regulaciones de Regimen en Motores de InduccionDocumento7 páginasRegulaciones de Regimen en Motores de InduccionMoraimaAún no hay calificaciones
- Sistema Flash para 15 ComponentesDocumento8 páginasSistema Flash para 15 ComponentesEnya Vives BntzAún no hay calificaciones
- Informe 6 DCDocumento8 páginasInforme 6 DCJOSE CARLOS TICONA VASQUEZAún no hay calificaciones
- Informe6 AcDocumento7 páginasInforme6 AcANDRES RODRIGUEZ VILLARROELAún no hay calificaciones
- TP Motor AsincrónicoDocumento6 páginasTP Motor AsincrónicoADRIAN ALFAROAún no hay calificaciones
- Universidad Nacional Autónoma de México: Facultad de Estudios Superiores AragónDocumento21 páginasUniversidad Nacional Autónoma de México: Facultad de Estudios Superiores AragónCIRO VLADIMIR MARTINEZ AGUILARAún no hay calificaciones
- Wilkins A Zurn CompanyDocumento39 páginasWilkins A Zurn Companyjankarlo arevaloAún no hay calificaciones
- Informe 11Documento14 páginasInforme 11Felipe Blair Ramírez ZamoraAún no hay calificaciones
- CORRECCION Tp4Documento8 páginasCORRECCION Tp4pedro mendozaAún no hay calificaciones
- Curva Vertical Segundo ParcialDocumento3 páginasCurva Vertical Segundo ParcialMauricio Aguilar SanchezAún no hay calificaciones
- Practica VDocumento15 páginasPractica VJesús GuillenAún no hay calificaciones
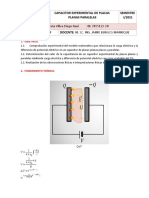
- Lab Nro 4 Fis 1200 A 1-2021 Capacitor Experimental de Placas Planas y ParalelasDocumento10 páginasLab Nro 4 Fis 1200 A 1-2021 Capacitor Experimental de Placas Planas y ParalelasDiego Raul Barreta Villca100% (2)
- EXAMEN MaterialesDocumento17 páginasEXAMEN MaterialesEduardo SmekeAún no hay calificaciones
- Laboratorio de Maquinas AsincronasDocumento9 páginasLaboratorio de Maquinas AsincronasJavier Mamani RamosAún no hay calificaciones
- Universidad de Buenos Aires Facultad de Ingenieria: Trabajo Práctico #4-Ensayo de Un Motor AsincrónicoDocumento11 páginasUniversidad de Buenos Aires Facultad de Ingenieria: Trabajo Práctico #4-Ensayo de Un Motor Asincrónicopedro mendozaAún no hay calificaciones
- Motor AceleracionDocumento15 páginasMotor AceleracionJuan David Tonguino AlcoserAún no hay calificaciones
- PresionesDocumento12 páginasPresionescarmelo velasquezAún no hay calificaciones
- Mediciones en El Ensayo en Vacio2Documento4 páginasMediciones en El Ensayo en Vacio2pgalaplataAún no hay calificaciones
- Los Tipos PuentesDocumento6 páginasLos Tipos PuentesRosniaAún no hay calificaciones
- Examen Demo3Documento33 páginasExamen Demo3Darwin SalazarAún no hay calificaciones
- Formulas Básicas para Calcular La Potencia de Motores Trifásicos de InducciónDocumento2 páginasFormulas Básicas para Calcular La Potencia de Motores Trifásicos de InducciónNell HOnguitoAún no hay calificaciones
- Corriente Alterna MonofasicaDocumento28 páginasCorriente Alterna MonofasicaRicardo Castañeda0% (1)
- Estaciones TransformadoraDocumento18 páginasEstaciones TransformadoraAlexander Davis Panduro RuedaAún no hay calificaciones
- (Traduccion) Armonicos en Sistemas de Distribucion ElectricaDocumento17 páginas(Traduccion) Armonicos en Sistemas de Distribucion Electricabryan eduardo villegas carrascoAún no hay calificaciones
- Informe PT100Documento5 páginasInforme PT100Javier Camilo Aldana BarreraAún no hay calificaciones
- Unidad VII Calculo de Enlace OpticoDocumento9 páginasUnidad VII Calculo de Enlace OpticoAlexander MartinezAún no hay calificaciones
- Práctica 2 ElectroDocumento9 páginasPráctica 2 ElectroMiguel ZalamancaAún no hay calificaciones
- Calculo Economico PDFDocumento6 páginasCalculo Economico PDFRobinson CastroAún no hay calificaciones
- Laboratorio 2 MaquinasDocumento18 páginasLaboratorio 2 MaquinasRoemer Ayala floresAún no hay calificaciones
- Zelio Logic - SR2B201FUDocumento6 páginasZelio Logic - SR2B201FUKharlaSotoAún no hay calificaciones
- PresilladoraDocumento110 páginasPresilladorajeison atehortuaAún no hay calificaciones
- InformeDocumento9 páginasInformejuan guarnizoAún no hay calificaciones
- Material Complementario Riesgo Electrico-1 (1) .PpsDocumento9 páginasMaterial Complementario Riesgo Electrico-1 (1) .PpsSthefany G. ChaparroAún no hay calificaciones
- Lab 5Documento5 páginasLab 5Engeelnicole Denegri100% (1)
- HQ2385 Detallada Cuero LisoDocumento1 páginaHQ2385 Detallada Cuero LisoCarlos Andrés Mejía VergelAún no hay calificaciones
- Campo MagneticoDocumento32 páginasCampo MagneticoM. D.Aún no hay calificaciones
- Tema 6 FísicaDocumento2 páginasTema 6 FísicaBeatriz Zurro RodríguezAún no hay calificaciones
- 1.4. - Ventaja de Colocar Filtros Activos Vs Pasivos para Mejorar El Factor de PotenciaDocumento31 páginas1.4. - Ventaja de Colocar Filtros Activos Vs Pasivos para Mejorar El Factor de PotenciaSaul AguilarAún no hay calificaciones
- Procedimiento de Trabajos ElectricosDocumento6 páginasProcedimiento de Trabajos ElectricosDaniel Jesús AlarcónAún no hay calificaciones
- TF de Tec HVDCDocumento188 páginasTF de Tec HVDCluisrearteAún no hay calificaciones
- Consulta Norma AnsiDocumento8 páginasConsulta Norma AnsiBeto Mera LaraAún no hay calificaciones
- Informe4 Dinamica de Maquinas Francisco ContentoDocumento2 páginasInforme4 Dinamica de Maquinas Francisco ContentoJuan Carlos GuamanAún no hay calificaciones
- Maxima Transferencia de Potencia en CADocumento2 páginasMaxima Transferencia de Potencia en CAJessenia MasaquizaAún no hay calificaciones
- Funcionamiento de Los Contactores y Las LaminasDocumento5 páginasFuncionamiento de Los Contactores y Las Laminascobos2k03Aún no hay calificaciones
- Cómo Conectar Un Rele Amperímetrico 2018Documento3 páginasCómo Conectar Un Rele Amperímetrico 2018Hector Marcelo FernandezAún no hay calificaciones
- Diseño de Un Convertidor de Fase Rotativo Capitulo IIDocumento111 páginasDiseño de Un Convertidor de Fase Rotativo Capitulo IIcarlosro0% (1)
- GD - FIS - NSC (Sin Resp)Documento7 páginasGD - FIS - NSC (Sin Resp)Azrak HantuzAún no hay calificaciones