También podría gustarte
- Televisión Digital Seminario Internacional Cuenca PDFDocumento258 páginasTelevisión Digital Seminario Internacional Cuenca PDFgontatto100% (1)
- Book - Arduino y Visual Studio - Lectura Digital (2012)Documento125 páginasBook - Arduino y Visual Studio - Lectura Digital (2012)David Garcia100% (1)
- Curso Pic Ccs Compiler01-2014Documento87 páginasCurso Pic Ccs Compiler01-2014Magus CardenasAún no hay calificaciones
- Practica 6 Display de 7 SegmentosDocumento9 páginasPractica 6 Display de 7 SegmentosSunmin WoonAún no hay calificaciones
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDe EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaAún no hay calificaciones
- Practica Display TinkercadDocumento16 páginasPractica Display TinkercadPASTAún no hay calificaciones
- Programa ArduinoDocumento36 páginasPrograma ArduinoKatherine Aroca RemacheAún no hay calificaciones
- Arduino Mega Motor Paso A PasoDocumento15 páginasArduino Mega Motor Paso A PasoJimmy J. Chanduvi GuevaraAún no hay calificaciones
- Decodificador BCD A 7 SegmentosDocumento4 páginasDecodificador BCD A 7 SegmentosMarcela MartinezAún no hay calificaciones
- Programa 1Documento4 páginasPrograma 1LUIS ENRIQUE MENA MENAAún no hay calificaciones
- Programa de Arduino Contador de 7 SegmentoDocumento5 páginasPrograma de Arduino Contador de 7 Segmentobricelda252Aún no hay calificaciones
- Contador Con 2 DisplaysDocumento5 páginasContador Con 2 DisplaysjsoberonAún no hay calificaciones
- Programa 3Documento4 páginasPrograma 3LUIS ENRIQUE MENA MENAAún no hay calificaciones
- ASCENSORDocumento4 páginasASCENSORJosé Estrada MenesesAún no hay calificaciones
- Examen MicroDocumento14 páginasExamen MicroElias Morales RosasAún no hay calificaciones
- Pid ArduinoDocumento13 páginasPid ArduinoCristoObal GuevaraAún no hay calificaciones
- 20 Display 7 Segmentos X 4 DígitosDocumento4 páginas20 Display 7 Segmentos X 4 Dígitosbuitrago sanchez johan sebastianAún no hay calificaciones
- Parcial Circuitos Digitales Corte 2Documento14 páginasParcial Circuitos Digitales Corte 2DavidAún no hay calificaciones
- Codigo Carro BluetoothDocumento3 páginasCodigo Carro BluetoothJhonatan Andres Lamus FigueroaAún no hay calificaciones
- Como Armar Un Auto A Control RemotoDocumento17 páginasComo Armar Un Auto A Control RemotoBriian ArielAún no hay calificaciones
- Codigo Fuente C ArduinoDocumento12 páginasCodigo Fuente C ArduinoJhonny A DiazAún no hay calificaciones
- Gpai2017b-p04a-Componentes Electronicos Con ArduinoDocumento52 páginasGpai2017b-p04a-Componentes Electronicos Con ArduinoAlexandra EncisoAún no hay calificaciones
- Informe Motor DC y EncoderDocumento3 páginasInforme Motor DC y EncoderMarcelo Mamani CharaAún no hay calificaciones
- L8 - Programacion Arduino - Parte 2Documento11 páginasL8 - Programacion Arduino - Parte 2Darikson Matthew V'cAún no hay calificaciones
- Programa 2Documento2 páginasPrograma 2LUIS ENRIQUE MENA MENAAún no hay calificaciones
- Seminario de Arduino Clase 2Documento22 páginasSeminario de Arduino Clase 2Francisco Javier CantoAún no hay calificaciones
- Contador 0 - 9 - Cod 61Documento10 páginasContador 0 - 9 - Cod 61juan carlosAún no hay calificaciones
- Test pc3 Arduino Marcar Apc 2020guablocho Yamilet PDFDocumento9 páginasTest pc3 Arduino Marcar Apc 2020guablocho Yamilet PDFGabriel Adrian Delgado GamarraAún no hay calificaciones
- Test pc3 Arduino Marcar Apc 2020guablocho Yamilet PDFDocumento9 páginasTest pc3 Arduino Marcar Apc 2020guablocho Yamilet PDFGabriel Adrian Delgado GamarraAún no hay calificaciones
- Interrupciones, Adc y PWM Practica 3Documento8 páginasInterrupciones, Adc y PWM Practica 3Marco A RichterAún no hay calificaciones
- CodigoDocumento3 páginasCodigoPatiño JAún no hay calificaciones
- CuestionarioDocumento10 páginasCuestionarioJorge HinojosaAún no hay calificaciones
- Asignar Nombers A PinsDocumento9 páginasAsignar Nombers A Pinsosorbio21Aún no hay calificaciones
- Contador 2 DigitosDocumento2 páginasContador 2 DigitosUnknown CrativeAún no hay calificaciones
- Calecita Automatica CDocumento32 páginasCalecita Automatica CDiego RomeroAún no hay calificaciones
- Codigos ArduinoDocumento14 páginasCodigos ArduinoWillbert NungarayAún no hay calificaciones
- Arduino Control Car V2 byDocumento7 páginasArduino Control Car V2 byedithAún no hay calificaciones
- Ejemplos Con ArduinoDocumento6 páginasEjemplos Con Arduinocesar optimusAún no hay calificaciones
- Control de Riego Sensor de HumedadDocumento5 páginasControl de Riego Sensor de Humedadyhonny01Aún no hay calificaciones
- Control de Riego Sensor de HumedadDocumento5 páginasControl de Riego Sensor de Humedadyhonny01Aún no hay calificaciones
- Ficha 3Documento5 páginasFicha 3roures76Aún no hay calificaciones
- Programación Con Arduino - FuncionesDocumento7 páginasProgramación Con Arduino - FuncionesIvon Maritza U GAún no hay calificaciones
- Programas Practica ExamenDocumento14 páginasProgramas Practica ExamenRafael nuñezAún no hay calificaciones
- Informe Arduino1-2Documento17 páginasInforme Arduino1-2Erick Martins Quispe GutierrezAún no hay calificaciones
- In For Me 1 PicDocumento33 páginasIn For Me 1 Picdavicho47100% (1)
- 4.3. - Comandos - Programación - ArduinoDocumento2 páginas4.3. - Comandos - Programación - ArduinoSebastian TravezAún no hay calificaciones
- TimerDocumento2 páginasTimerRaul CuandoAún no hay calificaciones
- Display 7 SegmentoDocumento7 páginasDisplay 7 Segmentomanuel1936 HernándezAún no hay calificaciones
- Practica Motor L 293Documento5 páginasPractica Motor L 293Maximiliano Cruz GarciaAún no hay calificaciones
- Programas en Lenguaje C para El PIC16F877Documento4 páginasProgramas en Lenguaje C para El PIC16F877Xavi SifuentesAún no hay calificaciones
- Contador de cuenta especial con FF-D y GAL22V10Documento6 páginasContador de cuenta especial con FF-D y GAL22V10Lalo GarciaAún no hay calificaciones
- Teclado Matricial 4x4 Con El PIC16F877ADocumento4 páginasTeclado Matricial 4x4 Con El PIC16F877AELPICHUEAún no hay calificaciones
- Teclado Matricial 4x4 Con El PIC16F877ADocumento4 páginasTeclado Matricial 4x4 Con El PIC16F877AKarlita M.Aún no hay calificaciones
- Codigo Contador de Eventos Practica 3 MSP430G2553Documento1 páginaCodigo Contador de Eventos Practica 3 MSP430G2553Mihkel VeLóAún no hay calificaciones
- Ejemplos_Arduino_Sentencias_Control_LEDsDocumento6 páginasEjemplos_Arduino_Sentencias_Control_LEDscesarAún no hay calificaciones
- Encender y apagar 8 LEDs con pulsadores usando PIC16F877ADocumento6 páginasEncender y apagar 8 LEDs con pulsadores usando PIC16F877AD. Stiven Castaño RaigozaAún no hay calificaciones
- Arduino Example 1Documento5 páginasArduino Example 1Laura CardenasAún no hay calificaciones
- Programa Del AguaDocumento2 páginasPrograma Del AguaLeonel Fabián JuárezAún no hay calificaciones
- Código Del Proyecto - Pic C CompilerDocumento5 páginasCódigo Del Proyecto - Pic C CompilerChristian Waldir Machaca MoscairaAún no hay calificaciones
- Nuevo Documento de TextoDocumento3 páginasNuevo Documento de TextoIsaac Reyes PechAún no hay calificaciones
- Fluido SabadoDocumento10 páginasFluido SabadoJhosseline Ticona C.Aún no hay calificaciones
- La Ley de Fourier001Documento20 páginasLa Ley de Fourier001Jhosseline Ticona C.Aún no hay calificaciones
- 3 3333 InglesDocumento9 páginas3 3333 InglesJhosseline Ticona C.Aún no hay calificaciones
- Mantenimiento Componentes ProyectoDocumento11 páginasMantenimiento Componentes ProyectoJhosseline Ticona C.Aún no hay calificaciones
- Ingle AjkajjajajazjzDocumento1 páginaIngle AjkajjajajazjzJhosseline Ticona C.Aún no hay calificaciones
- ,,,,,,,,, JKLJKDocumento18 páginas,,,,,,,,, JKLJKJhosseline Ticona C.Aún no hay calificaciones
- Trabajo Maqueta AutomatizadoDocumento18 páginasTrabajo Maqueta AutomatizadoJhosseline Ticona C.Aún no hay calificaciones
- Trabajo Mantenimiento 11111Documento10 páginasTrabajo Mantenimiento 11111Jhosseline Ticona C.Aún no hay calificaciones
- Mantenimiento PreventivoDocumento10 páginasMantenimiento PreventivoJhosseline Ticona C.Aún no hay calificaciones
- 04 - Lista de Fallas-J4000AGXZSDocumento30 páginas04 - Lista de Fallas-J4000AGXZSJeank Rivadeneyra100% (2)
- Cuál Es La Velocidad de Internet Necesaria para Utilizar IPTVDocumento7 páginasCuál Es La Velocidad de Internet Necesaria para Utilizar IPTVLuisAlbertoChipanaMamaniAún no hay calificaciones
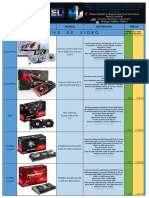
- Tarjetas de Video Sept ActualizadoDocumento5 páginasTarjetas de Video Sept ActualizadoPaco GerteAún no hay calificaciones
- Informe CONTRALORÍA Final Actuación Especial de Fiscalización Tamaño Del Mercado de La TV Cerrada en ColombiaDocumento63 páginasInforme CONTRALORÍA Final Actuación Especial de Fiscalización Tamaño Del Mercado de La TV Cerrada en ColombiaCarlos GarzonAún no hay calificaciones
- Manual Modulador SATELITE ROVERDocumento2 páginasManual Modulador SATELITE ROVERNacho Alvarez0% (1)
- Tarjeta GráficaDocumento11 páginasTarjeta GráficaJose Lopez0% (1)
- Codigo-Lcd Con ArduinoDocumento4 páginasCodigo-Lcd Con ArduinoRacer RacerAún no hay calificaciones
- TT4 Monitor Instruct EngSpan RevD tcm45-15682Documento2 páginasTT4 Monitor Instruct EngSpan RevD tcm45-15682ojm65Aún no hay calificaciones
- Cuestionario Grupo 7Documento3 páginasCuestionario Grupo 7flaki_sandyAún no hay calificaciones
- Epson PowerLite S6+Documento2 páginasEpson PowerLite S6+Obed LOAún no hay calificaciones
- VisualizadorDocumento3 páginasVisualizadorEdwin GonzalezAún no hay calificaciones
- Manual Del Seminario LCD HDDocumento32 páginasManual Del Seminario LCD HDLuis Arturo Leiva MonjarasAún no hay calificaciones
- Airis L105CDocumento4 páginasAiris L105CjapovedaAún no hay calificaciones
- LP HIKVISION GeneralDocumento19 páginasLP HIKVISION Generalcristhian alfonsoAún no hay calificaciones
- MAnual LCDDocumento2 páginasMAnual LCDJuan Ignacio IbhakatxeAún no hay calificaciones
- Catalogo Monitores CompuofertasDocumento5 páginasCatalogo Monitores CompuofertasJose CahuaAún no hay calificaciones
- Lista Mayo Ok WordDocumento28 páginasLista Mayo Ok WordNelson OsorioAún no hay calificaciones
- Sistemas de Enlace de TVDocumento14 páginasSistemas de Enlace de TVCristianQuispeVenturaAún no hay calificaciones
- LG 32pc5ra PDFDocumento41 páginasLG 32pc5ra PDFsagtv75% (8)
- Análisis y Síntesis de Imágenes de televisiónDocumento8 páginasAnálisis y Síntesis de Imágenes de televisiónMarianaAún no hay calificaciones
- Dispositivos de Salida de VideoDocumento5 páginasDispositivos de Salida de VideoVivi Plasencia San BlasAún no hay calificaciones
- Diferencias Entre Sli y CrossfireDocumento7 páginasDiferencias Entre Sli y CrossfireNico ZapeeAún no hay calificaciones
- TDT Profesional TarifaDocumento39 páginasTDT Profesional TarifaVEMATELAún no hay calificaciones
- Xelos 37 ESDocumento76 páginasXelos 37 ESdanieltruenoAún no hay calificaciones
- Kdl-R405a R425a R455a 40r475a EsDocumento76 páginasKdl-R405a R425a R455a 40r475a EsRino Raggi NúñezAún no hay calificaciones
- Program, A Display 7 Segmentos CaseroDocumento8 páginasProgram, A Display 7 Segmentos Caserohelmer ruizAún no hay calificaciones
- Comparativa de Laptops DELL, ASUS, HP, Lenovo y MSI hasta 5700 solesDocumento37 páginasComparativa de Laptops DELL, ASUS, HP, Lenovo y MSI hasta 5700 solesRobertCastilloAún no hay calificaciones
- LCD TV - tc-l32c22x - Manual de UsuarioDocumento54 páginasLCD TV - tc-l32c22x - Manual de Usuariocharleim21Aún no hay calificaciones
- Aoc Monitor G2460VQ6Documento1 páginaAoc Monitor G2460VQ6Oscar Alejandro Feria PrietoAún no hay calificaciones