También podría gustarte
- Acta de Acuerdo de ObraDocumento4 páginasActa de Acuerdo de ObraLAPCONAún no hay calificaciones
- Texto InstructivoDocumento4 páginasTexto Instructivofernando celestinoAún no hay calificaciones
- Principios Basicos de TalladoDocumento5 páginasPrincipios Basicos de TalladoW4d3Aún no hay calificaciones
- GESTION DE RESIDUOS SOLIDOS FinalDocumento51 páginasGESTION DE RESIDUOS SOLIDOS FinalMarco Rondoy MondragonAún no hay calificaciones
- Protocolo de Bioseguridad Juntas de Accion Comunal VFinalDocumento17 páginasProtocolo de Bioseguridad Juntas de Accion Comunal VFinalAndreiita Cristancho RamirezAún no hay calificaciones
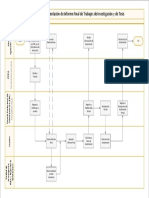
- Flujograma Informe Final de InvestigaciónDocumento1 páginaFlujograma Informe Final de InvestigaciónBrian AnkAún no hay calificaciones
- Planificacion Proyecto Integrador BiotecnologiaDocumento9 páginasPlanificacion Proyecto Integrador BiotecnologiaRubén RiveraAún no hay calificaciones
- 2.1.4.5 Lab - Configure Extended VLANs, VTP, and DTPDocumento8 páginas2.1.4.5 Lab - Configure Extended VLANs, VTP, and DTPWesthly Jose Sarabia CarrilloAún no hay calificaciones
- Procedimiento de Comunicación Entre BrigadistasDocumento4 páginasProcedimiento de Comunicación Entre BrigadistasDanny SánchezAún no hay calificaciones
- Gemba WalkDocumento3 páginasGemba Walkingemeca56Aún no hay calificaciones
- Libre RiaDocumento21 páginasLibre RiaCarlosespAún no hay calificaciones
- Significado de ObjetivoDocumento2 páginasSignificado de ObjetivoIngrid Vanessa Vera ArboledaAún no hay calificaciones
- Informe Nivelacion CerradaDocumento11 páginasInforme Nivelacion CerradaJr GuillenAún no hay calificaciones
- LISTA DE VERIFICACION DECRETO 1072 de 2015Documento5 páginasLISTA DE VERIFICACION DECRETO 1072 de 2015Jacobo FUentes100% (1)
- Mi Ciudad Natal Es Tirana 1Documento11 páginasMi Ciudad Natal Es Tirana 1trabajos estudiantes tiranaAún no hay calificaciones
- Catalogo Electronica ShopDocumento110 páginasCatalogo Electronica ShopaeduardocgAún no hay calificaciones
- Caso Empanada AlegreDocumento4 páginasCaso Empanada AlegreKarina Paternina uribeAún no hay calificaciones
- Convocatoria 2022Documento1 páginaConvocatoria 2022SONIA AGUILAR RIVERAAún no hay calificaciones
- Hernández María BalanceDocumento6 páginasHernández María BalanceFabiola HAAún no hay calificaciones
- Movilización de Pacientes PDFDocumento4 páginasMovilización de Pacientes PDFDiana AlarconAún no hay calificaciones
- 21 - Sistema de AdmisionDocumento6 páginas21 - Sistema de AdmisionJumpy FFCAún no hay calificaciones
- Probabilidad en Textiles y ProcesosDocumento85 páginasProbabilidad en Textiles y ProcesosAgrver ReisvrosAún no hay calificaciones
- Cada Familia Una Escuela - PORTAFOLIODocumento7 páginasCada Familia Una Escuela - PORTAFOLIODarviismar RiicardiiAún no hay calificaciones
- Lista de Inventario Del Equipamihttps - Epivigila - Minsal.cl - Ento1Documento9 páginasLista de Inventario Del Equipamihttps - Epivigila - Minsal.cl - Ento1Juan Carlos Yañez CepedaAún no hay calificaciones
- Ejercicios de Ángulos para Cuarto de SecundariaDocumento5 páginasEjercicios de Ángulos para Cuarto de SecundariaJOHN ACHAAún no hay calificaciones
- Irene Zuniga Sagredo 01Documento235 páginasIrene Zuniga Sagredo 01Miriam Lucy PacoAún no hay calificaciones
- Informe Fluvial FinalDocumento5 páginasInforme Fluvial FinalFrancis DenisseAún no hay calificaciones
- Ejercicios Condicionamiento OperanteDocumento2 páginasEjercicios Condicionamiento OperanteNicolás Muñoz100% (1)
- La Superestructura de Un PuenteDocumento6 páginasLa Superestructura de Un PuenteJordy Panta SaldarriagaAún no hay calificaciones
- 5.-Régimen - Sueldos y SalariosDocumento26 páginas5.-Régimen - Sueldos y SalariosGladys Yanira Flores GómezAún no hay calificaciones