También podría gustarte
- Polinomio CaracterísticoDocumento2 páginasPolinomio Característicoleticia vegaAún no hay calificaciones
- EcuaciónesDocumento2 páginasEcuaciónesleticia vegaAún no hay calificaciones
- Que Es SQLDocumento3 páginasQue Es SQLleticia vegaAún no hay calificaciones
- Qué Es La Ciencia de DatosDocumento3 páginasQué Es La Ciencia de Datosleticia vegaAún no hay calificaciones
- Componentes MLGDocumento4 páginasComponentes MLGleticia vegaAún no hay calificaciones
- Modelo Lineal GeneralizadoDocumento3 páginasModelo Lineal Generalizadoleticia vegaAún no hay calificaciones
- MLG - Máxima VerosimilitudDocumento5 páginasMLG - Máxima Verosimilitudleticia vegaAún no hay calificaciones
- Simón BolívarDocumento71 páginasSimón Bolívarleticia vegaAún no hay calificaciones
- Problemas Del Método de Los Mínimos CuadradosDocumento2 páginasProblemas Del Método de Los Mínimos Cuadradosleticia vegaAún no hay calificaciones
- Robert Anthony PlantDocumento3 páginasRobert Anthony Plantleticia vegaAún no hay calificaciones
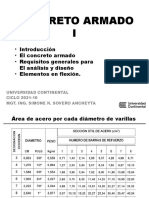
- Concreto Armado - Secciones Tipo TDocumento49 páginasConcreto Armado - Secciones Tipo TDEIVIS JHOAN PANEZ RICALDIAún no hay calificaciones
- Marco Teórico de Gestión Por ProcesosDocumento13 páginasMarco Teórico de Gestión Por Procesosmauryca2003Aún no hay calificaciones
- FARMACOCINETICADocumento49 páginasFARMACOCINETICASidonia SuazoAún no hay calificaciones
- Diaposcinetica - EXPODocumento48 páginasDiaposcinetica - EXPOJac AraujoAún no hay calificaciones
- Tolerancias de Forma y PosiciónDocumento12 páginasTolerancias de Forma y PosiciónJose HernandezAún no hay calificaciones
- Anualidades y RentasDocumento9 páginasAnualidades y RentasLaura Alejandra OrtegaAún no hay calificaciones
- Clasificación de Las Operaciones Unitarias Con Imagenes y LinkDocumento12 páginasClasificación de Las Operaciones Unitarias Con Imagenes y LinkLeandro Zambrano VelezAún no hay calificaciones
- Páginas DesdeProblemes XaviDocumento13 páginasPáginas DesdeProblemes XaviMarcelo Endimato Diaz CAún no hay calificaciones
- Estandarización InstrumentalDocumento4 páginasEstandarización InstrumentalLuisa JiménezAún no hay calificaciones
- ACTIVIDAD 4 CyT 3° - EXP.N°1Documento6 páginasACTIVIDAD 4 CyT 3° - EXP.N°1Dulce MiaAún no hay calificaciones
- Sony Muteki HTM7 - M5 - M3Documento64 páginasSony Muteki HTM7 - M5 - M3Lucas Dei CastelliAún no hay calificaciones
- Manual Instalar Multics en Ubuntu PDFDocumento4 páginasManual Instalar Multics en Ubuntu PDFFrancisco RibeiroAún no hay calificaciones
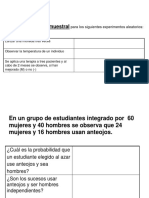
- Taller de Probabilidades AlumnosDocumento9 páginasTaller de Probabilidades AlumnosMISOL GALLEGUILLOS CALLEJASAún no hay calificaciones
- Problemas, U3. EA2024.Documento3 páginasProblemas, U3. EA2024.ANA PATRICIA ALEMAN DURONAún no hay calificaciones
- Ensayo de Dureza RockwellDocumento13 páginasEnsayo de Dureza RockwellRonald HernandezAún no hay calificaciones
- TEORIA PASARELA Presfor PDFDocumento16 páginasTEORIA PASARELA Presfor PDFMireya JimenezAún no hay calificaciones
- Tema 6 - Patrones Linguisticos - Modelo MiltonDocumento8 páginasTema 6 - Patrones Linguisticos - Modelo MiltonMiguel AngelAún no hay calificaciones
- Informe 5 Mecanica de Fluidos ImprimirDocumento16 páginasInforme 5 Mecanica de Fluidos ImprimirIvon MamaniAún no hay calificaciones
- Problemas de Suelos 1 1 PDFDocumento33 páginasProblemas de Suelos 1 1 PDFRita ManzaneroAún no hay calificaciones
- Lab 7. Dinámica Aplicada y Teoría de ControlDocumento9 páginasLab 7. Dinámica Aplicada y Teoría de ControlYorlenis VictoriaAún no hay calificaciones
- Tesis UnasDocumento86 páginasTesis UnasJhom Muriel AriasAún no hay calificaciones
- Triptico COMPARACION DE FRACCIONESDocumento2 páginasTriptico COMPARACION DE FRACCIONESraquelAún no hay calificaciones
- Cuestionario Preguntas de Elasticidades Demanda y OfertaDocumento4 páginasCuestionario Preguntas de Elasticidades Demanda y OfertaANA LIZ GUADALUPE VELASQUEZ CARBAJALAún no hay calificaciones
- URPDocumento20 páginasURPALEXANDERAún no hay calificaciones
- Práctica Conceptual 5Documento2 páginasPráctica Conceptual 5Javier AbadAún no hay calificaciones
- 3.ficha Práctica Racionales - GeneratrizDocumento4 páginas3.ficha Práctica Racionales - GeneratrizRodrigo GuerraAún no hay calificaciones
- TP1 ResolucionDocumento16 páginasTP1 ResolucionGabrielPeiterAún no hay calificaciones
- Introducción A La Relatividad Especial, Rafael FerraroDocumento23 páginasIntroducción A La Relatividad Especial, Rafael FerraroJime SiepeAún no hay calificaciones
- Integrales DoblesDocumento1 páginaIntegrales DoblesVictor MerlanoAún no hay calificaciones
- Compresor MultietapaDocumento3 páginasCompresor MultietapaAlex Aguirre100% (1)
- Diseño y construcción de algoritmosDe EverandDiseño y construcción de algoritmosCalificación: 4 de 5 estrellas4/5 (6)
- Análisis y diseño de algoritmos: Un enfoque prácticoDe EverandAnálisis y diseño de algoritmos: Un enfoque prácticoAún no hay calificaciones
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- Manual práctico de investigación de operaciones I. 4edDe EverandManual práctico de investigación de operaciones I. 4edCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Modelado y simulación de sistemas naturalesDe EverandModelado y simulación de sistemas naturalesAún no hay calificaciones
- Introducción a la estadística matemáticaDe EverandIntroducción a la estadística matemáticaCalificación: 5 de 5 estrellas5/5 (2)
- Métodos Matriciales para ingenieros con MATLABDe EverandMétodos Matriciales para ingenieros con MATLABCalificación: 5 de 5 estrellas5/5 (1)
- El problema de complementariedad No lineal: Teoría, aplicaciones y nuevos algoritmos para su soluciónDe EverandEl problema de complementariedad No lineal: Teoría, aplicaciones y nuevos algoritmos para su soluciónAún no hay calificaciones
- Criptografía sin secretos con Python: Spyware/Programa espíaDe EverandCriptografía sin secretos con Python: Spyware/Programa espíaCalificación: 5 de 5 estrellas5/5 (4)
- Control automático aplicado: Prácticas de laboratorio 2da. EdiciónDe EverandControl automático aplicado: Prácticas de laboratorio 2da. EdiciónCalificación: 3.5 de 5 estrellas3.5/5 (5)
- UF1125 - Técnicas de programación en fabricación mecánicaDe EverandUF1125 - Técnicas de programación en fabricación mecánicaAún no hay calificaciones
- Manual de estadística no paramétrica aplicada a los negociosDe EverandManual de estadística no paramétrica aplicada a los negociosAún no hay calificaciones