También podría gustarte
- Puesta en MarchaDocumento12 páginasPuesta en MarchaVictor ChuquimiaAún no hay calificaciones
- Rectificador trifásico onda completaDocumento5 páginasRectificador trifásico onda completaVictor ChuquimiaAún no hay calificaciones
- Simulaciones WINCUPLDocumento7 páginasSimulaciones WINCUPLVictor ChuquimiaAún no hay calificaciones
- Relaciones HumanasDocumento1 páginaRelaciones HumanasVictor ChuquimiaAún no hay calificaciones
- SistemasDocumento2 páginasSistemasVictor ChuquimiaAún no hay calificaciones
- Personas MayoresDocumento1 páginaPersonas MayoresVictor ChuquimiaAún no hay calificaciones
- Ejemplo PLDocumento3 páginasEjemplo PLVictor ChuquimiaAún no hay calificaciones
- Atm Etn1016Documento2 páginasAtm Etn1016Victor ChuquimiaAún no hay calificaciones
- Hitos iniciales metodología resolución problemas PLDocumento3 páginasHitos iniciales metodología resolución problemas PLVictor ChuquimiaAún no hay calificaciones
- Conseguir ResultadosDocumento1 páginaConseguir ResultadosVictor ChuquimiaAún no hay calificaciones
- Definir Un TemaDocumento2 páginasDefinir Un TemaVictor ChuquimiaAún no hay calificaciones
- Ejercicios Resueltos de ETN 502Documento3 páginasEjercicios Resueltos de ETN 502Victor ChuquimiaAún no hay calificaciones
- La FelicidadDocumento1 páginaLa FelicidadVictor ChuquimiaAún no hay calificaciones
- Ficha de InscripcionDocumento2 páginasFicha de InscripcionVictor ChuquimiaAún no hay calificaciones
- Socio en El ExitoDocumento1 páginaSocio en El ExitoVictor ChuquimiaAún no hay calificaciones
- CD4011BCDocumento8 páginasCD4011BCHenry Manzano TonatoAún no hay calificaciones
- Como Funciona Tu MenteDocumento2 páginasComo Funciona Tu MenteVictor ChuquimiaAún no hay calificaciones
- Cap 1Documento21 páginasCap 1Jhair LauraAún no hay calificaciones
- Cap 3Documento27 páginasCap 3Richard Villca TiconaAún no hay calificaciones
- Cap 4Documento14 páginasCap 4Victor ChuquimiaAún no hay calificaciones
- Diseño restador eliminador OFSET conversor frecuencia-voltajeDocumento5 páginasDiseño restador eliminador OFSET conversor frecuencia-voltajeVictor ChuquimiaAún no hay calificaciones
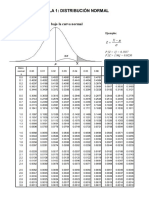
- Tabla Distribucion NormalDocumento1 páginaTabla Distribucion NormalVictor ChuquimiaAún no hay calificaciones
- Cap2 Sistemas LinealesDocumento17 páginasCap2 Sistemas LinealesVictor ChuquimiaAún no hay calificaciones
- Cap 8Documento13 páginasCap 8Victor ChuquimiaAún no hay calificaciones
- LitioDocumento162 páginasLitioVictor ChuquimiaAún no hay calificaciones
- Diseño ComversorDocumento14 páginasDiseño ComversorVictor ChuquimiaAún no hay calificaciones
- T Rec M.3010 200002 I!!pdf SDocumento46 páginasT Rec M.3010 200002 I!!pdf SDenise QuezadaAún no hay calificaciones
- Hay Un Camino Del Tesoro Dentro de Tu InteriorDocumento1 páginaHay Un Camino Del Tesoro Dentro de Tu InteriorVictor ChuquimiaAún no hay calificaciones
- Cadenas de MarkovDocumento10 páginasCadenas de MarkovVictor ChuquimiaAún no hay calificaciones
- Ficha 1 - 1ero B - Exp 5Documento3 páginasFicha 1 - 1ero B - Exp 5MateoxdddAún no hay calificaciones
- 4 El Mundo Del RazonamientoDocumento6 páginas4 El Mundo Del RazonamientoOMAR JAIMES CEPEDAAún no hay calificaciones
- Actividad 1 EstadisticaDocumento28 páginasActividad 1 EstadisticaCRYZADRYAún no hay calificaciones
- SSM TR TS005Documento6 páginasSSM TR TS005Priscila HurtadoAún no hay calificaciones
- La Cabaña Del Pionero y La Celda Del Monje - TextoDocumento51 páginasLa Cabaña Del Pionero y La Celda Del Monje - TextoEmiliano GaboardiAún no hay calificaciones
- Laboratorio de Paralelo de TransformadoresDocumento6 páginasLaboratorio de Paralelo de TransformadoresDario AbelAún no hay calificaciones
- Soluciones Leyes de NewtonDocumento7 páginasSoluciones Leyes de NewtonLishii Ðë Lä CallëAún no hay calificaciones
- Evaluación de Trigonometría en el Colegio SocorroDocumento1 páginaEvaluación de Trigonometría en el Colegio SocorroCristina PérezAún no hay calificaciones
- Abatimiento y RebatimientoDocumento14 páginasAbatimiento y RebatimientoAdolfo Arandia RicoAún no hay calificaciones
- Prueba DecimalesDocumento5 páginasPrueba DecimalesMariela Vargas AlarcónAún no hay calificaciones
- Examen IiDocumento2 páginasExamen IiDannyel Mejia RinconAún no hay calificaciones
- Clase Metodos Cuantitativos y Cualitativos (Analisis de Decision)Documento84 páginasClase Metodos Cuantitativos y Cualitativos (Analisis de Decision)David Arturo Garcia-Marquez TorresAún no hay calificaciones
- Temperatura, Calor y Gases en Ingenieria ElectronicaDocumento3 páginasTemperatura, Calor y Gases en Ingenieria ElectronicaRenee Edmundo Diaz LimaAún no hay calificaciones
- Planificación Trayecto Inicial Octubre 2021Documento5 páginasPlanificación Trayecto Inicial Octubre 2021darvin farfanAún no hay calificaciones
- Manual Del Usuario Gaussian 94 PDFDocumento86 páginasManual Del Usuario Gaussian 94 PDFAuro922Aún no hay calificaciones
- Evaluación T1 A ResueltaDocumento4 páginasEvaluación T1 A ResueltaCarlos Enrique Monsefu AlvarezAún no hay calificaciones
- 7 Momentos de Inercia. 2023-03Documento8 páginas7 Momentos de Inercia. 2023-03JOSE ALEJANDRO BURBANO NARVAEZAún no hay calificaciones
- Actividad8 Edisa DelacruzDocumento7 páginasActividad8 Edisa DelacruzJESUSBERTINAún no hay calificaciones
- Método de Aproximación de VogelDocumento16 páginasMétodo de Aproximación de VogelNoemi MChAún no hay calificaciones
- Teorialimiteteoriakeith 2018Documento8 páginasTeorialimiteteoriakeith 2018Rycardo CastroAún no hay calificaciones
- Variograma Experimental: Modelos y ParámetrosDocumento12 páginasVariograma Experimental: Modelos y ParámetrosAlex Diego Cardenas GallardoAún no hay calificaciones
- 1.algoritmos Ordenamiento y Técnica Divide y Venceras PDFDocumento54 páginas1.algoritmos Ordenamiento y Técnica Divide y Venceras PDFAriel BkrAún no hay calificaciones
- Boston International School: NIT 900.258.868-9. RESOLUCIÓN 04613 DE 2010 Página 1 de 1Documento3 páginasBoston International School: NIT 900.258.868-9. RESOLUCIÓN 04613 DE 2010 Página 1 de 1geidiflorezAún no hay calificaciones
- Modelo EconometríaDocumento8 páginasModelo EconometríaFabriiciiO FriiasAún no hay calificaciones
- EjerciciosdeFormulacionXi IO1 PDFDocumento6 páginasEjerciciosdeFormulacionXi IO1 PDFFlavia Rojas GuillenAún no hay calificaciones
- GeoplanoDocumento14 páginasGeoplanoAmanita Muscaria100% (1)
- InversionDocumento8 páginasInversionJairCuetoAún no hay calificaciones
- CALAPENSHKO-Sem06 HM ISM-IIDocumento7 páginasCALAPENSHKO-Sem06 HM ISM-IIGato Trueno0% (1)
- Cálculo Proposicional Demostración de Validez de LasDocumento16 páginasCálculo Proposicional Demostración de Validez de LasKuranashiAún no hay calificaciones
- Funciones complejas en el planoDocumento12 páginasFunciones complejas en el planoJosue UguñaAún no hay calificaciones