También podría gustarte
- PWM en Msp430g2553Documento5 páginasPWM en Msp430g2553Poliester Tejas CuadrosAún no hay calificaciones
- Mantenimiento y reparación de instalaciones de antenas en edificios. ELES0108De EverandMantenimiento y reparación de instalaciones de antenas en edificios. ELES0108Aún no hay calificaciones
- Manual Usuario Balanzas BP CP D DG SP SPGDocumento31 páginasManual Usuario Balanzas BP CP D DG SP SPGjohn aguirreAún no hay calificaciones
- Diligenciado Identificación de Activos - MAGERITDocumento14 páginasDiligenciado Identificación de Activos - MAGERITdeisman armando BedonAún no hay calificaciones
- Relacion Entre HardwareDocumento4 páginasRelacion Entre HardwareYeisson Beltran AquinoAún no hay calificaciones
- Laboratorio 03 Micro - PWMDocumento14 páginasLaboratorio 03 Micro - PWMSilence EngelAún no hay calificaciones
- Semaforo Con Pic16f887Documento8 páginasSemaforo Con Pic16f887Alexandro Torres100% (1)
- Laboratorio - 8 de PLCDocumento19 páginasLaboratorio - 8 de PLCJhoelito KennedyAún no hay calificaciones
- Variador de Vrms - PIC16f877ADocumento16 páginasVariador de Vrms - PIC16f877AArmando CajahuaringaAún no hay calificaciones
- HMI Motor FinalDocumento75 páginasHMI Motor FinalArmando TandapilcoAún no hay calificaciones
- Lab 5 PLCCCDocumento9 páginasLab 5 PLCCCroyAún no hay calificaciones
- Variador de Velocidad AC Con Triac y PICDocumento10 páginasVariador de Velocidad AC Con Triac y PICJose PocomuchaAún no hay calificaciones
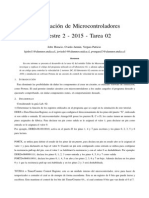
- Tarea 2Documento9 páginasTarea 2Patricio Andres Vergara PeñaAún no hay calificaciones
- Dimmer SonyDocumento16 páginasDimmer SonyPeter AndrewAún no hay calificaciones
- Lab05y06 Microcontroladores Castillo Garay Gonzales NarcisoDocumento28 páginasLab05y06 Microcontroladores Castillo Garay Gonzales NarcisoIsrael Castillo OlayaAún no hay calificaciones
- MCU Ma V4V6 #2 AF3Documento10 páginasMCU Ma V4V6 #2 AF3Miguel RiveraAún no hay calificaciones
- Praticas MicrosDocumento19 páginasPraticas MicrosArroz Frito Poki de LimónAún no hay calificaciones
- Consolidado Proyecto Final Electronica IndustrialDocumento15 páginasConsolidado Proyecto Final Electronica Industrialnewman135_277960859Aún no hay calificaciones
- Lab01 Estrategiasdecontrol C5 5C VARGAS PDFDocumento10 páginasLab01 Estrategiasdecontrol C5 5C VARGAS PDFAlvaro Vargas GonzalesAún no hay calificaciones
- Informe Previo Final 1Documento12 páginasInforme Previo Final 1jeanAún no hay calificaciones
- Informe de Laboratorio N 10 PLCDocumento25 páginasInforme de Laboratorio N 10 PLCLuis George TorresAún no hay calificaciones
- Timer 0 Microcontroladores Atmega8Documento6 páginasTimer 0 Microcontroladores Atmega8Sofia LudeñaAún no hay calificaciones
- MP Practica 04 P2 MSP-1Documento10 páginasMP Practica 04 P2 MSP-1Sam VslAún no hay calificaciones
- P11 ElectronicaDocumento11 páginasP11 ElectronicaVeronicaAún no hay calificaciones
- Reporte Laboratorio - Familias Logicas TTL y CMOSDocumento10 páginasReporte Laboratorio - Familias Logicas TTL y CMOSFrancisco Xavier Sevilla R.Aún no hay calificaciones
- Guia10 Microprocesadores 1 ELTDocumento3 páginasGuia10 Microprocesadores 1 ELTAlexander GonzalesAún no hay calificaciones
- Guia 4 PDFDocumento16 páginasGuia 4 PDFLUIS EDUARDO QUISPE MENDOZAAún no hay calificaciones
- Manual Novus N1500Documento36 páginasManual Novus N1500Javier SordoAún no hay calificaciones
- Manual n1500 - SpanishDocumento36 páginasManual n1500 - SpanishHerbertAún no hay calificaciones
- Soluciones Ejercicios Tema3 Estudiantes 05 06Documento30 páginasSoluciones Ejercicios Tema3 Estudiantes 05 06Milton AlvesAún no hay calificaciones
- Practica 8Documento14 páginasPractica 8isaacAún no hay calificaciones
- S06 PLC S7 1200 Temporizadores-Secuencia-ForzadaDocumento34 páginasS06 PLC S7 1200 Temporizadores-Secuencia-ForzadaAntonio Berrospi ZarateAún no hay calificaciones
- Práctica 4Documento5 páginasPráctica 4Julio A. PadillaAún no hay calificaciones
- MICRO1 Programa 6 TIMER 0 TemporizadorDocumento6 páginasMICRO1 Programa 6 TIMER 0 TemporizadorMian Chauca ApazaAún no hay calificaciones
- Guía ABP1 Buses de Campo y Configuración de InstrumentosDocumento11 páginasGuía ABP1 Buses de Campo y Configuración de InstrumentosFrancő ViąlAún no hay calificaciones
- Microcontroladores - Interrupciones para El PIC16F84A en Ensamblador.Documento10 páginasMicrocontroladores - Interrupciones para El PIC16F84A en Ensamblador.Alfre2AlcazarAún no hay calificaciones
- PWM en Msp430g2553Documento5 páginasPWM en Msp430g2553Adler HakimAún no hay calificaciones
- Proyecto ENVASADORA de BotellasDocumento25 páginasProyecto ENVASADORA de BotellasVictor H. Choque UrreloAún no hay calificaciones
- Práctica 2Documento6 páginasPráctica 2Julio A. PadillaAún no hay calificaciones
- Medidor de VoltajeDocumento15 páginasMedidor de VoltajeDAVID ALEJANDRO BURBANO USBANOAún no hay calificaciones
- Guia N 1 PLC AvanzadoDocumento12 páginasGuia N 1 PLC AvanzadoFernando Alexis Zambrano San MartinAún no hay calificaciones
- Interrupcion de Un Segundo para Msp430g2553Documento7 páginasInterrupcion de Un Segundo para Msp430g2553Carlos AguileraAún no hay calificaciones
- Informe PWMDocumento8 páginasInforme PWMEdu CartagenaAún no hay calificaciones
- Variador de Velocidad AC Con Triac y PICDocumento10 páginasVariador de Velocidad AC Con Triac y PICjohnAún no hay calificaciones
- Fernando Carlos Anchante Rivadeneyra - Lab 1-2023-1 - Circuitos Digitales - Compuertas Logicas BásicasDocumento2 páginasFernando Carlos Anchante Rivadeneyra - Lab 1-2023-1 - Circuitos Digitales - Compuertas Logicas BásicasJOSE ISRAEL CHOQUE PERALTAAún no hay calificaciones
- In For Me Practica 2Documento10 páginasIn For Me Practica 2Jose OrtizAún no hay calificaciones
- Practicas AvanzadasDocumento29 páginasPracticas AvanzadasEddy Javier Cruz HurtadoAún no hay calificaciones
- Curso General de Automatas Programables Industriales Omronpdf PDFDocumento130 páginasCurso General de Automatas Programables Industriales Omronpdf PDFLukasAún no hay calificaciones
- Practica5 - Modo Manual Modo AutomáticoDocumento15 páginasPractica5 - Modo Manual Modo AutomáticoHenry FloresAún no hay calificaciones
- Práctica 7 'PWM'Documento3 páginasPráctica 7 'PWM'Aldahir CortésAún no hay calificaciones
- Practica 5 Unidad 2 Vicente AlvarezDocumento9 páginasPractica 5 Unidad 2 Vicente AlvarezVicente AlvarezAún no hay calificaciones
- Laboratorio 2 Elt3890-2-2020Documento6 páginasLaboratorio 2 Elt3890-2-2020Joel CahuanaAún no hay calificaciones
- Example Overcurrent OvercurrentDirectionalDocumento25 páginasExample Overcurrent OvercurrentDirectionalMarcos Casanova Lopez50% (2)
- MiCOMT390 4.1.d SPDocumento92 páginasMiCOMT390 4.1.d SPNetaxion CelularAún no hay calificaciones
- Programar Un Generador de Impulsos en El STEP 7 V11 - InfoPLCDocumento4 páginasProgramar Un Generador de Impulsos en El STEP 7 V11 - InfoPLCJav BarreraAún no hay calificaciones
- Lab 6 PDFDocumento16 páginasLab 6 PDFJose Luis Rojas QuirozAún no hay calificaciones
- Manual Practicas Sistemas LogicosDocumento52 páginasManual Practicas Sistemas Logicostincho_0026Aún no hay calificaciones
- Control de Velocidad Motor DCDocumento21 páginasControl de Velocidad Motor DCzombey22Aún no hay calificaciones
- PWM en Msp430g2553Documento5 páginasPWM en Msp430g2553Carlos LMAún no hay calificaciones
- Reparación de instalaciones automatizadas. ELEE0109De EverandReparación de instalaciones automatizadas. ELEE0109Aún no hay calificaciones
- Mantenimiento preventivo de sistemas de automatización industrial. ELEM0311De EverandMantenimiento preventivo de sistemas de automatización industrial. ELEM0311Calificación: 4.5 de 5 estrellas4.5/5 (2)
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- Montaje de instalaciones automatizadas. ELEE0109De EverandMontaje de instalaciones automatizadas. ELEE0109Aún no hay calificaciones
- Tutorial Manejo Bancos de MemoriaDocumento3 páginasTutorial Manejo Bancos de MemoriaJoseph CapellanAún no hay calificaciones
- Preguntas Tarea 3 Cap 13Documento4 páginasPreguntas Tarea 3 Cap 13Joseph CapellanAún no hay calificaciones
- Preguntas Tarea 1 Cap 11Documento5 páginasPreguntas Tarea 1 Cap 11Joseph CapellanAún no hay calificaciones
- Preguntas Tarea 2 Cap 12Documento5 páginasPreguntas Tarea 2 Cap 12Joseph CapellanAún no hay calificaciones
- Modulación Por Desplazamiento de FaseDocumento14 páginasModulación Por Desplazamiento de FaseJoseph CapellanAún no hay calificaciones
- Modulación de Amplitud en CuadraturaDocumento9 páginasModulación de Amplitud en CuadraturaJoseph CapellanAún no hay calificaciones
- Unidad 6. Gestión de Tecnologías de InformaciónDocumento7 páginasUnidad 6. Gestión de Tecnologías de Informaciónsergiocena2012Aún no hay calificaciones
- 2.7.2 Lab - Configure Single-Area OSPFv2Documento10 páginas2.7.2 Lab - Configure Single-Area OSPFv2JORGE GUSTAVO TANDAZO CUEVAAún no hay calificaciones
- Actividad 1 SDA-NRPDocumento13 páginasActividad 1 SDA-NRPSantiagoAún no hay calificaciones
- Automatización de Tareas de Azure Mediante Scripts Con PowerShellDocumento16 páginasAutomatización de Tareas de Azure Mediante Scripts Con PowerShellKevin MoralesAún no hay calificaciones
- DiagramasDocumento9 páginasDiagramasMaira Avila MendozaAún no hay calificaciones
- Actualizacioacuten y Reparacioacuten de La PC 2012Documento182 páginasActualizacioacuten y Reparacioacuten de La PC 2012Leonard CoronilAún no hay calificaciones
- Internet ChoiseDocumento11 páginasInternet ChoiseLuca OrtizAún no hay calificaciones
- Gestores BibliograficosDocumento21 páginasGestores BibliograficosFABIO ANDRE CHOQUE CARRASCOAún no hay calificaciones
- Como Funcionan Los NavegadoresDocumento4 páginasComo Funcionan Los NavegadoresMaria Virginia AlvarezAún no hay calificaciones
- Actividad 3 Identificacion y Soluciones de ProblemasDocumento3 páginasActividad 3 Identificacion y Soluciones de ProblemasARTE LASERAún no hay calificaciones
- Evaluación AmboDocumento22 páginasEvaluación AmboJerson David Espinoza FaustinoAún no hay calificaciones
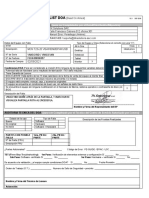
- Check List DoaDocumento1 páginaCheck List DoaManuel Verastegui JimenezAún no hay calificaciones
- Qué Es Una Máquina de TuringDocumento7 páginasQué Es Una Máquina de TuringJARNY ESTIVEN CANTE ALVAREZAún no hay calificaciones
- Seguridad Sistemas PDFDocumento8 páginasSeguridad Sistemas PDFDipe GoAún no hay calificaciones
- Sistemas Digitales II Lab7Documento6 páginasSistemas Digitales II Lab7Natalia Berrocal GámezAún no hay calificaciones
- LP - Linea - REDES Q2 22 CANALDocumento22 páginasLP - Linea - REDES Q2 22 CANALJean BaptisteAún no hay calificaciones
- Análisis de Los Delitos Informáticos en VenezuelaDocumento5 páginasAnálisis de Los Delitos Informáticos en VenezuelaYohelysAún no hay calificaciones
- Apn Operador MovistarDocumento10 páginasApn Operador MovistarJhon Jairo Mazuera GuzmanAún no hay calificaciones
- Capítulo 2 Localstorage Y SessionstorageDocumento15 páginasCapítulo 2 Localstorage Y SessionstoragemrvernsAún no hay calificaciones
- Asignación de Equipos-Jeyson ReynosoDocumento2 páginasAsignación de Equipos-Jeyson ReynosoJeyson ReynosoAún no hay calificaciones
- Bases de Datos Orientadas A ObjetosDocumento4 páginasBases de Datos Orientadas A ObjetosKEVIN MIGUEL PEREZ ARRIAGAAún no hay calificaciones
- Cuestionario EjemploDocumento7 páginasCuestionario EjemploGILMAR STEVEN GALLAGA MONTEROAún no hay calificaciones
- Los Patrones de Diseño en Java MVCDocumento13 páginasLos Patrones de Diseño en Java MVCEduardo YoungAún no hay calificaciones
- Ex Amen Complex IvoDocumento244 páginasEx Amen Complex IvoJhon Harrynson Jiménez RuirAún no hay calificaciones
- Estructura Metodológica ComputaciónDocumento6 páginasEstructura Metodológica ComputaciónRodrigo José Méndez GarcíaAún no hay calificaciones
- Plantilla Protocolo Individual de ARQUITECTURA DE SOFTWARE Unidad 1.Documento3 páginasPlantilla Protocolo Individual de ARQUITECTURA DE SOFTWARE Unidad 1.maria jimenez navarroAún no hay calificaciones
- Tarez Practica Sombreros Negro 8BDocumento4 páginasTarez Practica Sombreros Negro 8ByandryAún no hay calificaciones