También podría gustarte
- UF0852 - Instalación y actualización de sistemas operativosDe EverandUF0852 - Instalación y actualización de sistemas operativosCalificación: 5 de 5 estrellas5/5 (1)
- UF0853 - Explotación de las funcionalidades del sistema microinformáticoDe EverandUF0853 - Explotación de las funcionalidades del sistema microinformáticoAún no hay calificaciones
- Fundamentos de La Informatica AvanzadaDocumento13 páginasFundamentos de La Informatica AvanzadaMary Cisnero SorianoAún no hay calificaciones
- Transformación de Datos en Información (5a)Documento6 páginasTransformación de Datos en Información (5a)Jose Manuel Nuñez BelloAún no hay calificaciones
- TEMA1Documento10 páginasTEMA1Mion Sonozaki 23Aún no hay calificaciones
- Tecnologías Usadas para ProcesadoresDocumento11 páginasTecnologías Usadas para ProcesadoresMilcio GarciaAún no hay calificaciones
- 1P TALLER GRUPAL #1 Arquitectura 4SC IIC 22Documento6 páginas1P TALLER GRUPAL #1 Arquitectura 4SC IIC 22Johnn JimenezAún no hay calificaciones
- Informatica Basica para OposicionesDocumento46 páginasInformatica Basica para OposicionesJose Luis Anton Roldan100% (3)
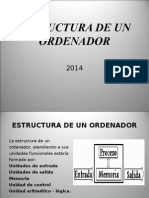
- Estructura de Un OrdenadorDocumento21 páginasEstructura de Un OrdenadorOscar AquinoAún no hay calificaciones
- Microprocesadores UNIDAD IDocumento10 páginasMicroprocesadores UNIDAD IDarwin DoranteAún no hay calificaciones
- Ampliación Tema 1Documento24 páginasAmpliación Tema 1Alejandro SánchezAún no hay calificaciones
- Solucion Gua 3 InformaticaDocumento35 páginasSolucion Gua 3 InformaticaNicolas OlayaAún no hay calificaciones
- Tarea 1 Etn 701Documento7 páginasTarea 1 Etn 701Madelen Martinez GarnicaAún no hay calificaciones
- Paul NewmanDocumento5 páginasPaul NewmanBenjamin VallejosAún no hay calificaciones
- Arquitectura de Von NeumannDocumento6 páginasArquitectura de Von NeumannGalo MiñanAún no hay calificaciones
- Diagrama de Computadora y Funcionamiento-El Fenómeno CibernéticoDocumento8 páginasDiagrama de Computadora y Funcionamiento-El Fenómeno CibernéticoAli SerranoAún no hay calificaciones
- Hardware EstructuraDocumento19 páginasHardware Estructurayenyj100% (12)
- Procesador 8 BitsDocumento12 páginasProcesador 8 BitsEnrique Galindo100% (1)
- Investigacion para Diapositiva InformaticaDocumento10 páginasInvestigacion para Diapositiva InformaticaErika PerazaAún no hay calificaciones
- Tema 3 - El - ProcesadorDocumento18 páginasTema 3 - El - Procesadorlespi primoAún no hay calificaciones
- Arquitectura de Un OrdenadorDocumento27 páginasArquitectura de Un Ordenadorluis - peligroAún no hay calificaciones
- Apuntes Von NeumannDocumento7 páginasApuntes Von NeumannMarian PetrutAún no hay calificaciones
- Guia Mantenimiento de HardwareDocumento6 páginasGuia Mantenimiento de HardwareEdAún no hay calificaciones
- Areli Bravo - Actividad 1Documento19 páginasAreli Bravo - Actividad 1Juari RamosAún no hay calificaciones
- Resumen-Sistemas de ComputacionDocumento6 páginasResumen-Sistemas de ComputacionDilan Jauregui SanchezAún no hay calificaciones
- Primera Evaluación Montaje SMRDocumento31 páginasPrimera Evaluación Montaje SMRMarina BgAún no hay calificaciones
- Material de Apoyo (Información Del Taller)Documento20 páginasMaterial de Apoyo (Información Del Taller)Jose Guillermo AcostaAún no hay calificaciones
- Composicion Interna de La ComputadoraDocumento4 páginasComposicion Interna de La ComputadoraNoel Pérez OliveraAún no hay calificaciones
- Organización Básica, Diseño Del ComputadorDocumento4 páginasOrganización Básica, Diseño Del ComputadorAdrian MedinaAún no hay calificaciones
- Material de Lectura Unidad1 Inf-1110-05-10-2023Documento34 páginasMaterial de Lectura Unidad1 Inf-1110-05-10-2023Carolina MariaAún no hay calificaciones
- Tarea 4 ODC - Yael MonteroDocumento4 páginasTarea 4 ODC - Yael MonteroYael MonteroAún no hay calificaciones
- EXAMEN Informatica BasicaDocumento8 páginasEXAMEN Informatica BasicaEdna Milena SantamariaAún no hay calificaciones
- Tema 1 SiDocumento30 páginasTema 1 SiAlejandro Cabrera RomeroAún no hay calificaciones
- Christian Ricardo Vaca Lopez - Actividad3baseS1Documento41 páginasChristian Ricardo Vaca Lopez - Actividad3baseS1Christian Vaca LopezAún no hay calificaciones
- Capitulo5 Procesamiento de DatosDocumento38 páginasCapitulo5 Procesamiento de DatosCarlos ManzanaresAún no hay calificaciones
- Diagrama Bloques ComputadoraDocumento6 páginasDiagrama Bloques ComputadoraLuis Felipe OsorioAún no hay calificaciones
- Manual Sobre MicroprocesadoresDocumento9 páginasManual Sobre Microprocesadoresedgar_edk0% (1)
- Introducción A Los Microprocesadores y MicrocontroladoresDocumento16 páginasIntroducción A Los Microprocesadores y MicrocontroladoresHuginn Von Valhalla100% (1)
- Cómo Se Procesa La InformaciónDocumento5 páginasCómo Se Procesa La InformaciónLuis Enrique Gutierrez SuttaAún no hay calificaciones
- FDH t1 Introduccion A Sistemas InformaticosDocumento7 páginasFDH t1 Introduccion A Sistemas InformaticosRubenSlimAún no hay calificaciones
- Imprimir SistDocumento17 páginasImprimir SistAlex Jr SullnAún no hay calificaciones
- Tema 2 Elementos OrdenadorDocumento11 páginasTema 2 Elementos Ordenadorsromero_245118Aún no hay calificaciones
- Hardware - Introduccion y Conceptos BásicosDocumento19 páginasHardware - Introduccion y Conceptos BásicosMario Luis RosasAún no hay calificaciones
- FP DAM Sistemas InformáticosDocumento45 páginasFP DAM Sistemas InformáticosPablo García-Lluis Ramírez100% (1)
- Un Microprocesador de 8 Bits Z80Documento85 páginasUn Microprocesador de 8 Bits Z80Sebastián SandovalAún no hay calificaciones
- Actividad 1 - Arquitectura de VON NEUMANNDocumento12 páginasActividad 1 - Arquitectura de VON NEUMANNMike IEUAún no hay calificaciones
- Arquitectura ComputadorDocumento17 páginasArquitectura ComputadorElias Merida AlmanzaAún no hay calificaciones
- Partes Que Se Compone El CPUDocumento12 páginasPartes Que Se Compone El CPULorena CusmeAún no hay calificaciones
- TRABAJO Sistemas Electronicos Unida 5 PDFDocumento16 páginasTRABAJO Sistemas Electronicos Unida 5 PDFrobertoAún no hay calificaciones
- Tema 15.3.9. - Controladoras. Interfaces de Conexión.Documento78 páginasTema 15.3.9. - Controladoras. Interfaces de Conexión.Natalia Solís GómezAún no hay calificaciones
- Trabajo 2Documento6 páginasTrabajo 2Dalton Criollo RomeroAún no hay calificaciones
- Arquitectura Básica de Un MicroprocesadorDocumento4 páginasArquitectura Básica de Un MicroprocesadorveabreuAún no hay calificaciones
- Tarea 1 de ArquitecturaDocumento6 páginasTarea 1 de Arquitecturaing.enriqueloriaAún no hay calificaciones
- ArquitecturaDocumento12 páginasArquitecturapolAún no hay calificaciones
- Unidad Central de Proceso CpuDocumento3 páginasUnidad Central de Proceso CpuAndrea JimenezAún no hay calificaciones
- Unidad IDocumento10 páginasUnidad IJose Manuel Godoy EscribarAún no hay calificaciones
- Desarrollo de componentes software para el manejo de dispositivos. IFCT0609De EverandDesarrollo de componentes software para el manejo de dispositivos. IFCT0609Aún no hay calificaciones
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeDe EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeAún no hay calificaciones
- Kit Letrero LuminosoDocumento48 páginasKit Letrero LuminosoAurora MejíaAún no hay calificaciones
- Lenguajes de Interfaz Unidad 2 Programacion 328PDocumento43 páginasLenguajes de Interfaz Unidad 2 Programacion 328PAurora MejíaAún no hay calificaciones
- Lenguajes de Interfaz Unidad 2 MicrocontroladoresDocumento15 páginasLenguajes de Interfaz Unidad 2 MicrocontroladoresAurora MejíaAún no hay calificaciones
- Lenguajes de Interfaz Unidad 2 Atmel Studio ADocumento17 páginasLenguajes de Interfaz Unidad 2 Atmel Studio AAurora MejíaAún no hay calificaciones
- Lenguajes de Interfaz Unidad 2 Arquitectura 328PDocumento22 páginasLenguajes de Interfaz Unidad 2 Arquitectura 328PAurora MejíaAún no hay calificaciones
- Lenguajes de Interfaz Unidad 1Documento17 páginasLenguajes de Interfaz Unidad 1Aurora MejíaAún no hay calificaciones
- Lenguajes de Interfaz Unidad 2 Operaciones LogicasDocumento8 páginasLenguajes de Interfaz Unidad 2 Operaciones LogicasAurora MejíaAún no hay calificaciones
- Lenguajes de Interfaz Unidad 1 Sistemas NumericosDocumento10 páginasLenguajes de Interfaz Unidad 1 Sistemas NumericosAurora MejíaAún no hay calificaciones
- Transformador de Aislamiento y Transformador Con Diodo Dividido PDFDocumento6 páginasTransformador de Aislamiento y Transformador Con Diodo Dividido PDFChema Bizarron100% (1)
- Reparación de InversoresDocumento27 páginasReparación de Inversoresefren hurtadoAún no hay calificaciones
- Practica 4 ModDocumento12 páginasPractica 4 ModIsaac Tonatiuh Ayala PérezAún no hay calificaciones
- Práctica de LaboratorioDocumento23 páginasPráctica de LaboratorioFabian NinAún no hay calificaciones
- Bases de datos-JMDocumento3 páginasBases de datos-JMJonathanAún no hay calificaciones
- Levantamiento de Información General Del Cliente - AvayaDocumento8 páginasLevantamiento de Información General Del Cliente - AvayaBrayan Nicolás Martínez RomeroAún no hay calificaciones
- Lista de Precios Dahua MarzoDocumento51 páginasLista de Precios Dahua MarzoNelly AcevedoAún no hay calificaciones
- Cuadro Comparativo de Multiplexacion OdtDocumento2 páginasCuadro Comparativo de Multiplexacion OdtEduardo UnadmxAún no hay calificaciones
- Diagnostico 1ros ProgDocumento2 páginasDiagnostico 1ros ProgBetty OrtegaAún no hay calificaciones
- Tarea 4 Desarrollar Códigos en Lenguaje EnsambladorDocumento8 páginasTarea 4 Desarrollar Códigos en Lenguaje EnsambladorJefferson Ivan AmezquitaAún no hay calificaciones
- Examen RectificadoresDocumento2 páginasExamen RectificadoresasmedmirandaAún no hay calificaciones
- TImer LabviewDocumento5 páginasTImer LabviewAndres NavasAún no hay calificaciones
- KSN EsDocumento9 páginasKSN EsDantesco27 13Aún no hay calificaciones
- Examen Final de Laboratorio de Circuitos Electrónicos L 16 UnmsmDocumento2 páginasExamen Final de Laboratorio de Circuitos Electrónicos L 16 UnmsmEduardo Paredes AlatristaAún no hay calificaciones
- Desarrollo A Las Actividades de La Semana 2 de Diseno de Productos Electronicos Con Microcontroladores AutoguardadoDocumento14 páginasDesarrollo A Las Actividades de La Semana 2 de Diseno de Productos Electronicos Con Microcontroladores AutoguardadoOMAR YESID MARTINEZ PENAAún no hay calificaciones
- Taller de DireccionamientoDocumento3 páginasTaller de DireccionamientoDIDIER JAIR URAN AVENDAÑOAún no hay calificaciones
- Popular Transistors BALASTRODocumento6 páginasPopular Transistors BALASTROMechín Rodriguez EjvrAún no hay calificaciones
- Actividad 3Documento14 páginasActividad 3MARIA CATALINA MONTEJO RAMOSAún no hay calificaciones
- Fuente - Alimentacion Resumen 5Documento1 páginaFuente - Alimentacion Resumen 5BrandonAún no hay calificaciones
- La Electronica y El CorazonDocumento3 páginasLa Electronica y El CorazonAngsusParrizAún no hay calificaciones
- Glosario PLC Automatizacion IndustrialDocumento7 páginasGlosario PLC Automatizacion Industrialjhonnymlf0% (1)
- Proyecto 4 en C TecladoDocumento6 páginasProyecto 4 en C TecladoAlex Daniel GarciaAún no hay calificaciones
- Unifilar 34,5kVDocumento15 páginasUnifilar 34,5kVOscar Leonardo Rincon PulidoAún no hay calificaciones
- Suarez Gomez, Angela JulietDocumento18 páginasSuarez Gomez, Angela Julietcarlos andresAún no hay calificaciones
- Eeid Eeid-508 FormatoalumnotrabajofinalDocumento8 páginasEeid Eeid-508 FormatoalumnotrabajofinalJennifer EspejoAún no hay calificaciones
- Guia Dimmer TriacDocumento5 páginasGuia Dimmer TriacMARIANA ALDANA CASTELLANOSAún no hay calificaciones
- Practica 3 Lab ElectronicaDocumento5 páginasPractica 3 Lab ElectronicaVanessa HurtadoAún no hay calificaciones
- Guia de Aprendizaje Ejecucion RedesDocumento12 páginasGuia de Aprendizaje Ejecucion RedesRafael OrregoAún no hay calificaciones
- Manual ArduinoDocumento70 páginasManual ArduinoJiraiyaGoketsu100% (1)
- TP3 U8 K1031 Grupo9Documento3 páginasTP3 U8 K1031 Grupo9Germán FernandezAún no hay calificaciones