También podría gustarte
- Metodo de Control de PozosDocumento99 páginasMetodo de Control de PozosAntonio CastellanosAún no hay calificaciones
- Manual de Conexiones Superficiales de Control PetrolerasDocumento76 páginasManual de Conexiones Superficiales de Control PetrolerasAntonio CastellanosAún no hay calificaciones
- DocumentDocumento63 páginasDocumentAntonio CastellanosAún no hay calificaciones
- Resumen Unidad 1Documento3 páginasResumen Unidad 1Antonio CastellanosAún no hay calificaciones
- Tabla Comparativa Unidad 2Documento9 páginasTabla Comparativa Unidad 2Antonio CastellanosAún no hay calificaciones
- Teoría X y Y, Frederick, VroomDocumento4 páginasTeoría X y Y, Frederick, VroomAntonio CastellanosAún no hay calificaciones
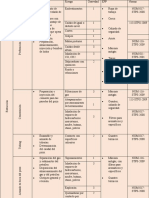
- Tabla de Riesgos en El Proceso de ExtraccionDocumento1 páginaTabla de Riesgos en El Proceso de ExtraccionAntonio CastellanosAún no hay calificaciones
- Tema 4 Control de PozosDocumento17 páginasTema 4 Control de PozosAntonio Castellanos100% (1)
- Propiedades Extensivas e IntensivasDocumento2 páginasPropiedades Extensivas e IntensivasAntonio CastellanosAún no hay calificaciones