También podría gustarte
- Formulas de OndasDocumento7 páginasFormulas de OndasCarlos Arturo Caceres AndradeAún no hay calificaciones
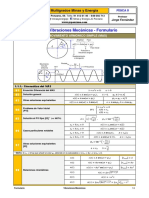
- Formulario Vibraciones PDFDocumento4 páginasFormulario Vibraciones PDFgabo2008Aún no hay calificaciones
- 1-Formulario VibracionesDocumento4 páginas1-Formulario VibracionesMonica Valeria Galindo HernándezAún no hay calificaciones
- 1-Formulario VibracionesDocumento4 páginas1-Formulario VibracionesAramis Ramirez0% (1)
- 1-Formulario Vibraciones PDFDocumento4 páginas1-Formulario Vibraciones PDFjoseAún no hay calificaciones
- Cálculo de Momentos de Empotramiento de 2 Cargas PuntualesDocumento6 páginasCálculo de Momentos de Empotramiento de 2 Cargas PuntualesAlbert Richard Miranda SivilaAún no hay calificaciones
- Aplicaciones de Las Ecuaciones Diferenciales A La QuímicaDocumento4 páginasAplicaciones de Las Ecuaciones Diferenciales A La QuímicaAlberto AS25% (4)
- Sistemas de Un Grado de Libertad (Vibración Libre Con Amortiguamiento)Documento20 páginasSistemas de Un Grado de Libertad (Vibración Libre Con Amortiguamiento)Jorge Eliecer Campuzano CarmonaAún no hay calificaciones
- 15-16 RM Mayo Sol 1 3 4Documento3 páginas15-16 RM Mayo Sol 1 3 4DavidAún no hay calificaciones
- PRÁCTICA CALIFICADA 1 - 03 Octubre SOLUCIONARIODocumento10 páginasPRÁCTICA CALIFICADA 1 - 03 Octubre SOLUCIONARIONEISER HELI HERRERA AGREDA - IC - ESTUDIANTEAún no hay calificaciones
- Puntos 21.89 - 21.98 Sears Zemansky 13° EdicionDocumento2 páginasPuntos 21.89 - 21.98 Sears Zemansky 13° EdicionJuan Angel Gualguan Oviedo100% (2)
- Formulas Cal2Documento1 páginaFormulas Cal2Juan Fernando Ayulo TemocheAún no hay calificaciones
- Leyes de NewtonDocumento14 páginasLeyes de Newton20221278Aún no hay calificaciones
- 01 Unidad Vibración Libre en Sistemas VibratoriosDocumento37 páginas01 Unidad Vibración Libre en Sistemas VibratoriosKevin CordovaAún no hay calificaciones
- Tarea #1 Dinamica AplicadaDocumento2 páginasTarea #1 Dinamica AplicadaFranco GionoAún no hay calificaciones
- Solucionario SustiDocumento6 páginasSolucionario SustiMarcelo TorresAún no hay calificaciones
- EDO Semana 12 y 13Documento18 páginasEDO Semana 12 y 13Juan Antony Robles VegaAún no hay calificaciones
- Ejercicio Ecuacion de OndaDocumento5 páginasEjercicio Ecuacion de OndaOscar QuirosAún no hay calificaciones
- Formulario de Cinética y Reactores HomogéneosDocumento2 páginasFormulario de Cinética y Reactores HomogéneosGaby LopezAún no hay calificaciones
- Formulario de Cinética y Reactores HomogéneosDocumento2 páginasFormulario de Cinética y Reactores Homogéneosgby lpzAún no hay calificaciones
- Formulario Segundo ParcialDocumento2 páginasFormulario Segundo Parcialpablo almadaAún no hay calificaciones
- Trabajo Integral de DuhamelDocumento23 páginasTrabajo Integral de DuhamelCamilo Andres NiñoAún no hay calificaciones
- Tema 3 Reacciones de Segundo OrdenDocumento2 páginasTema 3 Reacciones de Segundo Ordenismael machacaAún no hay calificaciones
- Hoja de Formulas ADEDocumento4 páginasHoja de Formulas ADEestherAún no hay calificaciones
- Formulario FQ1Documento2 páginasFormulario FQ1eleanorsovAún no hay calificaciones
- FormularioDocumento5 páginasFormulario317073023Aún no hay calificaciones
- Ipn Formulario AvanazadasDocumento3 páginasIpn Formulario AvanazadasRoberto Sanchez VelAún no hay calificaciones
- Problemas Movimiento Armónico SimpleDocumento23 páginasProblemas Movimiento Armónico Simpleatravatra100% (1)
- Prueba 02 I 2020 Pauta-PtjeDocumento5 páginasPrueba 02 I 2020 Pauta-PtjeVictor AstorgaAún no hay calificaciones
- Onda 2Documento6 páginasOnda 2Valeria Gabaldon JuarezAún no hay calificaciones
- Equilibrio RelativoDocumento6 páginasEquilibrio RelativoArturo FontanaAún no hay calificaciones
- Guía15 - PRQ500 - 3PDocumento9 páginasGuía15 - PRQ500 - 3PStanley Escobar AlanocaAún no hay calificaciones
- UntitledDocumento3 páginasUntitledJENNIFER PORTILLAAún no hay calificaciones
- Teoría de La TorsiónDocumento4 páginasTeoría de La Torsióngabriel williamsAún no hay calificaciones
- Taller 1 U2Documento18 páginasTaller 1 U2Thalia Ml50% (4)
- Tratamiento de Aguas IIDocumento4 páginasTratamiento de Aguas IIMelissa SerpaAún no hay calificaciones
- Guía 5 - Dinámica AplicadaDocumento3 páginasGuía 5 - Dinámica AplicadaRolexAún no hay calificaciones
- Solución de Sistema de Ecuaciones Diferenciales en ScilabDocumento2 páginasSolución de Sistema de Ecuaciones Diferenciales en ScilabNanfer Perea0% (2)
- MaterialDeApoyo VFDocumento8 páginasMaterialDeApoyo VFmariaaa brAún no hay calificaciones
- Parcial de ControlDocumento9 páginasParcial de ControlKEVIN DANILO ACEVEDO PEREZ ESTUDIANTE ACTIVOAún no hay calificaciones
- Taller Movimiento Ondulatorio Fisica 2Documento17 páginasTaller Movimiento Ondulatorio Fisica 2Jesús Mamani TuyoAún no hay calificaciones
- Formulario FQ1 U1Documento2 páginasFormulario FQ1 U1Alan PalaciosAún no hay calificaciones
- Actividad 6 Cureño Fuentes Adrian Jair 4AM1Documento10 páginasActividad 6 Cureño Fuentes Adrian Jair 4AM1Diegao PerezAún no hay calificaciones
- Semana3 - Números Reales e Inecuaciones (1) - 230506 - 002606Documento38 páginasSemana3 - Números Reales e Inecuaciones (1) - 230506 - 002606Bruce J. CórdovaAún no hay calificaciones
- Modelado de Sistemas Térmicos, Hidráulicos y Analogías PDFDocumento34 páginasModelado de Sistemas Térmicos, Hidráulicos y Analogías PDFJENIFER RODRIGUEZ ROBAYOAún no hay calificaciones
- Formulario ColumnasDocumento3 páginasFormulario ColumnaskrlosAún no hay calificaciones
- 3 Ec DiferencDocumento1 página3 Ec DiferencJulio AlzamoraAún no hay calificaciones
- Solucion de Las Ecuaciones Diferenciales Vibracion Libre 2019-1 PDFDocumento14 páginasSolucion de Las Ecuaciones Diferenciales Vibracion Libre 2019-1 PDFJosÞ Miguel Osorio TelloAún no hay calificaciones
- Taller Movimiento Armonico SimpleDocumento11 páginasTaller Movimiento Armonico SimpleMarlon Gomez Zapata100% (1)
- Mtse U1 A3 MastDocumento6 páginasMtse U1 A3 MastMAURICIOAún no hay calificaciones
- FormularioFQ1 1Documento6 páginasFormularioFQ1 1Emma CastellanosAún no hay calificaciones
- Actividad en Linea #03 - Rafael Guevara, DanteDocumento6 páginasActividad en Linea #03 - Rafael Guevara, DanteDilfredo Rafael LivaqueAún no hay calificaciones
- 1 - PC1 - REPASO - Solución PDFDocumento6 páginas1 - PC1 - REPASO - Solución PDFRichard AlhAún no hay calificaciones
- Tarea 2-MatsupDocumento3 páginasTarea 2-Matsupanacatalina2121Aún no hay calificaciones
- Ecuaciones Diferenciales Aplicadas A Ingeniería QuímicaDocumento9 páginasEcuaciones Diferenciales Aplicadas A Ingeniería Químicaels25Aún no hay calificaciones
- Curso básico de teoría de númerosDe EverandCurso básico de teoría de númerosCalificación: 5 de 5 estrellas5/5 (2)
- ESTR. ACERO - Anexo C - v2021Documento4 páginasESTR. ACERO - Anexo C - v2021miguel colqueAún no hay calificaciones
- ESTR. ACERO - Anexo A - v2021Documento6 páginasESTR. ACERO - Anexo A - v2021miguel colqueAún no hay calificaciones
- ESTR. ACERO - Anexo E - v2021Documento4 páginasESTR. ACERO - Anexo E - v2021miguel colqueAún no hay calificaciones
- ESTR. ACERO - Anexo B - v2021Documento4 páginasESTR. ACERO - Anexo B - v2021miguel colqueAún no hay calificaciones
- VariablesContinuas ExponencialDocumento5 páginasVariablesContinuas ExponencialJuan Camilo LondoñoAún no hay calificaciones
- Meza 2017-1Documento11 páginasMeza 2017-1Brandon Flores VillanuevaAún no hay calificaciones
- Laboratorio Semana 2Documento2 páginasLaboratorio Semana 2Sergio Alberto Escobedo RodriguezAún no hay calificaciones
- Introduccion A Los Sistemas de Seguridad Automotriz Edición 2019Documento29 páginasIntroduccion A Los Sistemas de Seguridad Automotriz Edición 2019Pablo DiazAún no hay calificaciones
- Lista de CotejoDocumento4 páginasLista de CotejoMonicaAún no hay calificaciones
- Evaluación 2Documento11 páginasEvaluación 2Matias ArenasAún no hay calificaciones
- TF-3331 Extracción Líquido-LíquidoDocumento87 páginasTF-3331 Extracción Líquido-LíquidoYoselinRamosAún no hay calificaciones
- Me 1Documento39 páginasMe 1Nelson GonzalezAún no hay calificaciones
- TesisI Marcio FinalgbfdgDocumento28 páginasTesisI Marcio FinalgbfdgMarci AlexisAún no hay calificaciones
- BDPH1200 ManualDocumento36 páginasBDPH1200 ManualAngel SuárezAún no hay calificaciones
- FUNCIONESDocumento11 páginasFUNCIONESAlex LoveraAún no hay calificaciones
- Guión 5 Empirismo, Sensualismo y PositivismoDocumento142 páginasGuión 5 Empirismo, Sensualismo y PositivismoJaime PerezAún no hay calificaciones
- Higiene IndustrialDocumento27 páginasHigiene IndustrialMaria A Solano GómezAún no hay calificaciones
- Cronograma Anual MATEMATICAS 2013Documento4 páginasCronograma Anual MATEMATICAS 2013Mané GonzálezAún no hay calificaciones
- Tema 4 - El Diodo IdealDocumento25 páginasTema 4 - El Diodo IdealAntonio BustamanteAún no hay calificaciones
- DS CT4128 Es Es 76362Documento10 páginasDS CT4128 Es Es 76362Luis Miguel R SAún no hay calificaciones
- Teorema de Fatiga.Documento11 páginasTeorema de Fatiga.samuelAún no hay calificaciones
- Fuerza y Par de Torsión de Una EspiraDocumento9 páginasFuerza y Par de Torsión de Una EspiraBryan Tiago FonsecaAún no hay calificaciones
- 4 Saludos Protocolares y PresentacionesDocumento39 páginas4 Saludos Protocolares y PresentacioneslorenaAún no hay calificaciones
- UNIDAD 01 2019 5to GradoDocumento23 páginasUNIDAD 01 2019 5to GradoYansyAún no hay calificaciones
- Ensayo de Compresión de Cubos de MorteroDocumento3 páginasEnsayo de Compresión de Cubos de MorteroJulio Giron100% (2)
- Laboratorio 2 de Mecanica de Fluidos 2.0Documento28 páginasLaboratorio 2 de Mecanica de Fluidos 2.0Alexander VillalbaAún no hay calificaciones
- Curso Diseño de Tuberias PipingDocumento14 páginasCurso Diseño de Tuberias PipingClaudio Andrés Espejo Díaz100% (2)
- ALCOHOLESDocumento14 páginasALCOHOLESEFRAINAún no hay calificaciones
- PCC1301 - Manual Del OperadorDocumento94 páginasPCC1301 - Manual Del OperadorRoberth Abarca100% (2)
- Catálogo de Conceptos CDMXDocumento372 páginasCatálogo de Conceptos CDMXBlanca Oliver100% (2)
- Estudio de La Llama y Densidad UrpDocumento10 páginasEstudio de La Llama y Densidad UrpMiguel Enrique Guevara Loayza0% (1)
- 8 Principio de Variedad de Los SistemasDocumento5 páginas8 Principio de Variedad de Los SistemasCarlos Cano AntezanaAún no hay calificaciones