También podría gustarte
- Sep ProtecciónDocumento10 páginasSep ProtecciónAlonso Gonzalez SorianoAún no hay calificaciones
- DILEMA EticoDocumento3 páginasDILEMA EticoAlonso Gonzalez SorianoAún no hay calificaciones
- Energías Alternativas 8°beDocumento16 páginasEnergías Alternativas 8°beAlonso Gonzalez SorianoAún no hay calificaciones
- Energías Alternativas 8°beDocumento16 páginasEnergías Alternativas 8°beAlonso Gonzalez SorianoAún no hay calificaciones
- Actividad 2Documento2 páginasActividad 2Alonso Gonzalez SorianoAún no hay calificaciones
- 5be-Instalaciones ElectricasDocumento25 páginas5be-Instalaciones ElectricasAlonso Gonzalez SorianoAún no hay calificaciones
- Análisis de ProblematicasDocumento2 páginasAnálisis de ProblematicasAlonso Gonzalez SorianoAún no hay calificaciones
- Act 1 t2 - Equipo 1 - Costos y Presupuestos de Proyectos eDocumento3 páginasAct 1 t2 - Equipo 1 - Costos y Presupuestos de Proyectos eAlonso Gonzalez SorianoAún no hay calificaciones
- Act1 t4Documento29 páginasAct1 t4Alonso Gonzalez SorianoAún no hay calificaciones
- Evaluación T4Documento3 páginasEvaluación T4Alonso Gonzalez SorianoAún no hay calificaciones
- Hipotesis BiomasaDocumento1 páginaHipotesis BiomasaAlonso Gonzalez Soriano100% (1)
- Act 1-1Documento16 páginasAct 1-1Alonso Gonzalez SorianoAún no hay calificaciones
- YBUS Y ZBUS A2t2Documento5 páginasYBUS Y ZBUS A2t2Alonso Gonzalez SorianoAún no hay calificaciones
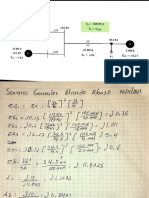
- Soriano Gonzalez Ricardo Alonso - A2t1Documento10 páginasSoriano Gonzalez Ricardo Alonso - A2t1Alonso Gonzalez SorianoAún no hay calificaciones
- 3.1 Problemário ElectronicaDocumento7 páginas3.1 Problemário ElectronicaAlonso Gonzalez SorianoAún no hay calificaciones
- Dispositivos Proteccion Redes Sistema DistribucionDocumento21 páginasDispositivos Proteccion Redes Sistema DistribucionSaul Morales ReynosoAún no hay calificaciones
- ACR Trip GeneradorDocumento1 páginaACR Trip GeneradorVictor CarhuaricraAún no hay calificaciones
- 02 Clase 2 Lógica Cableada - Programada PDFDocumento13 páginas02 Clase 2 Lógica Cableada - Programada PDFSebastian AmadoAún no hay calificaciones
- INTRODUCCIÓN CONCEPTOS DE SEP y PROTECCIONESDocumento30 páginasINTRODUCCIÓN CONCEPTOS DE SEP y PROTECCIONESSuterm SeccionAún no hay calificaciones
- Pointer Circuito Basico PDFDocumento16 páginasPointer Circuito Basico PDFJan Svein HammerAún no hay calificaciones
- Manuale RGAM SpagnoloDocumento25 páginasManuale RGAM Spagnolojmonteronova90% (10)
- 03 Mando ElectricoDocumento27 páginas03 Mando ElectricoKratos2711Aún no hay calificaciones
- Toyota Corolla (E110) (1995-2002) Diagrama de FusiblesDocumento16 páginasToyota Corolla (E110) (1995-2002) Diagrama de Fusiblesomar castroAún no hay calificaciones
- Electricidad y Electronica Automotriz 02Documento36 páginasElectricidad y Electronica Automotriz 02Librería SIGMAAún no hay calificaciones
- Detector Por InfrarrojoDocumento3 páginasDetector Por InfrarrojoPame NuñezAún no hay calificaciones
- PracticasDocumento43 páginasPracticasElkjaer Yuri CJAún no hay calificaciones
- Manual de Operación de Relé de SincronismoDocumento4 páginasManual de Operación de Relé de SincronismoDanny ChachaAún no hay calificaciones
- FP 400Y-6M Product Page Spanish 6-2017Documento4 páginasFP 400Y-6M Product Page Spanish 6-2017DANIEL USCATEGUIAún no hay calificaciones
- Panel de Alarmas ELIOPDocumento0 páginasPanel de Alarmas ELIOPMiguel ÁngelAún no hay calificaciones
- YRHC - 0804 ESP - Rev - 24 - 081Documento40 páginasYRHC - 0804 ESP - Rev - 24 - 081cesar luis gonzalez rodriguezAún no hay calificaciones
- 01-Introducción A Los PLCDocumento17 páginas01-Introducción A Los PLCKleber YappertAún no hay calificaciones
- Mass Effect Call of CthulhuDocumento32 páginasMass Effect Call of CthulhuPrinny OverlordAún no hay calificaciones
- Proyecto Sistema de AlarmaDocumento48 páginasProyecto Sistema de AlarmaYadiraDelCarmenZapata67% (3)
- Apuntes Mat. Motor PDFDocumento35 páginasApuntes Mat. Motor PDFAntonio Jesús Dueñas del Cerro100% (1)
- III. RSLOGIX 500. La Memoria Del Procesador Incluye Archivos de Programa y Archivos de Datos.Documento25 páginasIII. RSLOGIX 500. La Memoria Del Procesador Incluye Archivos de Programa y Archivos de Datos.Ticona Juanes IlderAún no hay calificaciones
- Informe 1 EnclavamientoDocumento12 páginasInforme 1 EnclavamientoLuis Andres Ayala NasturAún no hay calificaciones
- Insercion de Fallas en El Sistema Aire Acondicionado Parte ElectricaDocumento10 páginasInsercion de Fallas en El Sistema Aire Acondicionado Parte ElectricaFelipe Barrera CatalánAún no hay calificaciones
- Pia MotoresDocumento7 páginasPia MotoresRodríguez Valdez AlondraAún no hay calificaciones
- Examen Final Protecciones ElectricasDocumento6 páginasExamen Final Protecciones Electricasvanessa quispe100% (1)
- Instrucciones Modulos HochikiDocumento27 páginasInstrucciones Modulos Hochikizdiego84Aún no hay calificaciones
- Ficha Chint Serie NQ2Documento5 páginasFicha Chint Serie NQ2HUSSEIN ESAU READI JAIMEAún no hay calificaciones
- IM218 Sentry RampHold Manual Mar2010.en - EsDocumento28 páginasIM218 Sentry RampHold Manual Mar2010.en - EsHilcías RangelAún no hay calificaciones
- 2100 sr007 - Es eDocumento30 páginas2100 sr007 - Es eWanessa SuárezAún no hay calificaciones
- Centralita Resol Deltasol BS ProDocumento24 páginasCentralita Resol Deltasol BS ProGoheimAún no hay calificaciones
- Curso A Distancia Camión 793F Parte 1: Entrenamiento de Servicio NPI Camiones de Obra 793FDocumento32 páginasCurso A Distancia Camión 793F Parte 1: Entrenamiento de Servicio NPI Camiones de Obra 793FgianmarcoAún no hay calificaciones