También podría gustarte
- 04 Groves2010EG-IOCG-PAPERDocumento27 páginas04 Groves2010EG-IOCG-PAPERAngel Cubas RiveraAún no hay calificaciones
- Inventario Fuentes Agua Subterranea - ChilcaDocumento142 páginasInventario Fuentes Agua Subterranea - ChilcarafaeltellodiazAún no hay calificaciones
- Identificación de zonas de riesgo geológico en el Paso La Araña mediante ensayos RMR y Q BartonDocumento17 páginasIdentificación de zonas de riesgo geológico en el Paso La Araña mediante ensayos RMR y Q BartonAngel Cubas RiveraAún no hay calificaciones
- Hannington, M. Et Al. (2005)Documento31 páginasHannington, M. Et Al. (2005)Angel Cubas RiveraAún no hay calificaciones
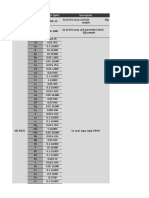
- InterpretacionDocumento3 páginasInterpretacionAngel Cubas RiveraAún no hay calificaciones
- Grupo1 - Tarea2 - Analisis QuimicoDocumento9 páginasGrupo1 - Tarea2 - Analisis QuimicoAngel Cubas RiveraAún no hay calificaciones
- Grupo1 - Tarea2 - Presupuesto de Análisis QuimicosDocumento4 páginasGrupo1 - Tarea2 - Presupuesto de Análisis QuimicosAngel Cubas RiveraAún no hay calificaciones
- GRUPO - 1 - EXPO - 1 - Diagnostico Rsidual para El Ajuste de Un VariogramaDocumento5 páginasGRUPO - 1 - EXPO - 1 - Diagnostico Rsidual para El Ajuste de Un VariogramaAngel Cubas RiveraAún no hay calificaciones
- Invitación, Cronograma UNMSM 2020 PDFDocumento3 páginasInvitación, Cronograma UNMSM 2020 PDFEvelin Karla Mamani ArroyoAún no hay calificaciones
- Depositos SMVDocumento58 páginasDepositos SMVDave FloresAún no hay calificaciones
- InstruccionesDocumento2 páginasInstruccionesAngel Cubas RiveraAún no hay calificaciones
- Imaña, M. Et Al. (2013)Documento4 páginasImaña, M. Et Al. (2013)Angel Cubas RiveraAún no hay calificaciones
- Diagnóstico Residual para El Ajuste de Un VariogramaDocumento13 páginasDiagnóstico Residual para El Ajuste de Un VariogramaAngel Cubas RiveraAún no hay calificaciones
- Grupos de Bioestratigrafía 2020-IIDocumento2 páginasGrupos de Bioestratigrafía 2020-IIAngel Cubas RiveraAún no hay calificaciones
- Clase 10 PEPS (Principios Estrat y Geocron) PDFDocumento5 páginasClase 10 PEPS (Principios Estrat y Geocron) PDFAbilin RojitasAún no hay calificaciones
- Ensayos de LaboratorioDocumento11 páginasEnsayos de LaboratorioAngel Cubas RiveraAún no hay calificaciones
- ExamenDocumento5 páginasExamenAngel Cubas RiveraAún no hay calificaciones
- Examen de SuelosDocumento13 páginasExamen de SuelosAngel Cubas RiveraAún no hay calificaciones
- Examen de SuelosDocumento13 páginasExamen de SuelosAngel Cubas RiveraAún no hay calificaciones
- Respeto y responsabilidad en la educaciónDocumento1 páginaRespeto y responsabilidad en la educaciónAngel Cubas RiveraAún no hay calificaciones
- Examen de SuelosDocumento3 páginasExamen de SuelosAngel Cubas RiveraAún no hay calificaciones
- ElvaDocumento1 páginaElvaAngel Cubas RiveraAún no hay calificaciones
- Examen de Entrada IDocumento2 páginasExamen de Entrada IAngel Cubas RiveraAún no hay calificaciones
- Chira Iocg-1Documento14 páginasChira Iocg-1Angel Cubas RiveraAún no hay calificaciones
- Emsbo, P. (2009)Documento26 páginasEmsbo, P. (2009)Angel Cubas RiveraAún no hay calificaciones
- Examen de Entrada IDocumento2 páginasExamen de Entrada IAngel Cubas RiveraAún no hay calificaciones
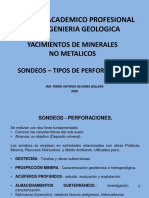
- Perforaciones PDFDocumento60 páginasPerforaciones PDFLeonor PatriciaAún no hay calificaciones
- 04 Groves2010EG-IOCG-PAPERDocumento27 páginas04 Groves2010EG-IOCG-PAPERAngel Cubas RiveraAún no hay calificaciones
- Clase 10 PEPS (Principios Estrat y Geocron) PDFDocumento5 páginasClase 10 PEPS (Principios Estrat y Geocron) PDFAbilin RojitasAún no hay calificaciones
- Trabajo Final AutoCadDocumento76 páginasTrabajo Final AutoCadHeidi Gisell JimenezAún no hay calificaciones
- Actividad No.5Documento8 páginasActividad No.5Marcela Yaya AcostaAún no hay calificaciones
- AF5. Metodología de La Investigación en Las Ciencias SocialesDocumento2 páginasAF5. Metodología de La Investigación en Las Ciencias SocialesJosue Sonora80% (5)
- Esp - Tec - Implementacion - TecnologicaDocumento49 páginasEsp - Tec - Implementacion - Tecnologicagian alejandroAún no hay calificaciones
- 2016 Atenea Datasheet (1778)Documento2 páginas2016 Atenea Datasheet (1778)Orlando FlorezAún no hay calificaciones
- Estrategia de Ventas Click & CleanDocumento2 páginasEstrategia de Ventas Click & CleanFrancis BramalAún no hay calificaciones
- A3 (8P) 1.6 TDI Con Motor CAYBDocumento2 páginasA3 (8P) 1.6 TDI Con Motor CAYBBoston BanguAún no hay calificaciones
- Como Usar La PipetaDocumento4 páginasComo Usar La PipetaMaría Teresa Hernández GamarraAún no hay calificaciones
- Practica2 FV red-SISIFODocumento14 páginasPractica2 FV red-SISIFOCarlos ColladoAún no hay calificaciones
- Decimo Segunda ClaseDocumento25 páginasDecimo Segunda ClaseGreisy Alania AlvarezAún no hay calificaciones
- Proyecto de Aprendizaje #1 2019 Ept1°Documento13 páginasProyecto de Aprendizaje #1 2019 Ept1°Mario Yager Bautista VillanuevaAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Fase 5 - Prueba Objetiva Abierta (POA)Documento6 páginasGuía de Actividades y Rúbrica de Evaluación - Fase 5 - Prueba Objetiva Abierta (POA)caroAún no hay calificaciones
- Autoevaluación 2 - Gestion de Mantenimiento (44625)Documento5 páginasAutoevaluación 2 - Gestion de Mantenimiento (44625)Susanasmm SusanasmmAún no hay calificaciones
- Planos TopograficosDocumento5 páginasPlanos TopograficosRomel gustavoAún no hay calificaciones
- Mapa de Riesgos y OportunidadesDocumento301 páginasMapa de Riesgos y OportunidadesEstefanía CalderónAún no hay calificaciones
- Matem Ticas B SicasDocumento4 páginasMatem Ticas B SicasMaria Paula Navarro ZalameaAún no hay calificaciones
- Manual de Organización Fundacite 2017Documento38 páginasManual de Organización Fundacite 2017aaron27Aún no hay calificaciones
- Por qué estudiar Contaduría Pública en la CUN SoachaDocumento1 páginaPor qué estudiar Contaduría Pública en la CUN SoachaROLDAN STEVE TORRES PEÑAAún no hay calificaciones
- Perez Blanco - Jon - 904869 - IEDocumento177 páginasPerez Blanco - Jon - 904869 - IEJasmineAún no hay calificaciones
- Método SCAMPERDocumento4 páginasMétodo SCAMPERDaniela ArroyoAún no hay calificaciones
- VRF Configuración BásicaDocumento23 páginasVRF Configuración Básicamario portillaAún no hay calificaciones
- VOLAVA Spanish 2020Documento31 páginasVOLAVA Spanish 2020jguribeAún no hay calificaciones
- Laboratorio 03-2021Documento2 páginasLaboratorio 03-2021Leiner Amilcar Rios VictorioAún no hay calificaciones
- Proceso Cartera VencidaDocumento5 páginasProceso Cartera VencidaNELLY ALBARRACIN GUASHAMBOAún no hay calificaciones
- Modelo Mantto Rutinario y No RutinarioDocumento16 páginasModelo Mantto Rutinario y No RutinarioJosé Manuel Calapuja PaucaraAún no hay calificaciones
- Final BolsaDocumento42 páginasFinal BolsaKAREN ELISA ROCA CHINCHILLAAún no hay calificaciones
- Amenazas de seguridad y sus defensasDocumento5 páginasAmenazas de seguridad y sus defensascontaminación aguaAún no hay calificaciones
- Cajeros automáticos y su impactoDocumento5 páginasCajeros automáticos y su impactoCristhian Sipiran HurtadoAún no hay calificaciones
- Encuesta Sobre Fake News Dirigida A JóvenesDocumento2 páginasEncuesta Sobre Fake News Dirigida A JóvenesLorena del Carmen Roldan MaqueoAún no hay calificaciones
- Ficha 5 Simbologia de Soldadura PDFDocumento3 páginasFicha 5 Simbologia de Soldadura PDFISRAEL PORTILLOAún no hay calificaciones
- La Biblia de las Matemáticas RápidasDe EverandLa Biblia de las Matemáticas RápidasCalificación: 4.5 de 5 estrellas4.5/5 (19)
- Estadística básica: Introducción a la estadística con RDe EverandEstadística básica: Introducción a la estadística con RCalificación: 5 de 5 estrellas5/5 (8)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraDe EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraCalificación: 4.5 de 5 estrellas4.5/5 (5)
- Didáctica de la matemática en la escuela primariaDe EverandDidáctica de la matemática en la escuela primariaCalificación: 2.5 de 5 estrellas2.5/5 (3)
- La Teoría de Conjuntos y los Fundamentos de las MatemáticasDe EverandLa Teoría de Conjuntos y los Fundamentos de las MatemáticasCalificación: 5 de 5 estrellas5/5 (1)
- Psicoterapia psicoanalítica: Investigación, evaluación y práctica clínicaDe EverandPsicoterapia psicoanalítica: Investigación, evaluación y práctica clínicaAún no hay calificaciones
- Introducción a la Estadística BayesianaDe EverandIntroducción a la Estadística BayesianaCalificación: 5 de 5 estrellas5/5 (2)
- Enseñar Matemática hoy: Miradas, sentidos y desafíosDe EverandEnseñar Matemática hoy: Miradas, sentidos y desafíosCalificación: 5 de 5 estrellas5/5 (1)
- La noción de medio en la teoría de las situaciones didácticas: Una herramienta para analizar decisiones en las clases de matemáticaDe EverandLa noción de medio en la teoría de las situaciones didácticas: Una herramienta para analizar decisiones en las clases de matemáticaCalificación: 5 de 5 estrellas5/5 (1)
- Control de calidad. Un enfoque integral y estadísticoDe EverandControl de calidad. Un enfoque integral y estadísticoCalificación: 5 de 5 estrellas5/5 (8)
- Introducción a las ecuaciones de la física matemáticaDe EverandIntroducción a las ecuaciones de la física matemáticaCalificación: 5 de 5 estrellas5/5 (4)
- Modelización matemática en el aula: Posibilidades y necesidadesDe EverandModelización matemática en el aula: Posibilidades y necesidadesCalificación: 5 de 5 estrellas5/5 (1)
- Qué es (y qué no es) la estadística: Usos y abusos de una disciplina clave en la vida de los países y las personasDe EverandQué es (y qué no es) la estadística: Usos y abusos de una disciplina clave en la vida de los países y las personasCalificación: 4.5 de 5 estrellas4.5/5 (3)
- La Gestión de los Residuos Sólidos Urbanos en Brasil:: descripción general, conceptos, aplicaciones y perspectivasDe EverandLa Gestión de los Residuos Sólidos Urbanos en Brasil:: descripción general, conceptos, aplicaciones y perspectivasCalificación: 1 de 5 estrellas1/5 (1)
- Mi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaDe EverandMi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaCalificación: 5 de 5 estrellas5/5 (5)
- La matriz divina: Un puente entre el tiempo, el espacio, las creencias y los milagrosDe EverandLa matriz divina: Un puente entre el tiempo, el espacio, las creencias y los milagrosCalificación: 4 de 5 estrellas4/5 (72)
- Introducción a la estadística matemáticaDe EverandIntroducción a la estadística matemáticaCalificación: 5 de 5 estrellas5/5 (2)
- Métodos cuantitativos 4a Ed. Herramientas para la investigación en saludDe EverandMétodos cuantitativos 4a Ed. Herramientas para la investigación en saludCalificación: 4 de 5 estrellas4/5 (1)
- Álgebra lineal aplicada a las ciencias económicas 2edDe EverandÁlgebra lineal aplicada a las ciencias económicas 2edCalificación: 4 de 5 estrellas4/5 (1)
- Probabilidad y estadística: un enfoque teórico-prácticoDe EverandProbabilidad y estadística: un enfoque teórico-prácticoCalificación: 4 de 5 estrellas4/5 (40)
- Iniciación al estudio de la teoría de las situaciones didácticasDe EverandIniciación al estudio de la teoría de las situaciones didácticasCalificación: 5 de 5 estrellas5/5 (1)
- Fundamentos de matemática: Introducción al nivel universitarioDe EverandFundamentos de matemática: Introducción al nivel universitarioCalificación: 3 de 5 estrellas3/5 (9)
- Introducción al análisis estadístico multivariado aplicado: Experiencia y casos en el Caribe colombianoDe EverandIntroducción al análisis estadístico multivariado aplicado: Experiencia y casos en el Caribe colombianoCalificación: 5 de 5 estrellas5/5 (2)
- Métodos cuantitativos 3a. Ed. Herramientas para la investigación en saludDe EverandMétodos cuantitativos 3a. Ed. Herramientas para la investigación en saludAún no hay calificaciones