También podría gustarte
- CertificadoDocumento1 páginaCertificadosharlyn rios garciaAún no hay calificaciones
- PeñaDocumento1 páginaPeñasharlyn rios garciaAún no hay calificaciones
- A1B2 Tabla Comparativa ECHADocumento2 páginasA1B2 Tabla Comparativa ECHAsharlyn rios garciaAún no hay calificaciones
- A1 B1 Tablade DispositivosDocumento2 páginasA1 B1 Tablade Dispositivossharlyn rios garciaAún no hay calificaciones
- Actividad T3-01 ESTATICADocumento20 páginasActividad T3-01 ESTATICAsharlyn rios garciaAún no hay calificaciones
- Red RDocumento7 páginasRed RSergio Limck PlnckkAún no hay calificaciones
- Proyecto FinalDocumento9 páginasProyecto FinalCamilo Ortega100% (1)
- Practica Ask, PSK, FSKDocumento5 páginasPractica Ask, PSK, FSKmoni2662Aún no hay calificaciones
- Planificacion Radio Electric A Con AtollDocumento83 páginasPlanificacion Radio Electric A Con Atollabusidik100% (1)
- Unidad 3 Fase 3 - Cálculo Del RadioenlaceDocumento8 páginasUnidad 3 Fase 3 - Cálculo Del RadioenlaceGiovanny OrtizAún no hay calificaciones
- Codigo HDB3Documento2 páginasCodigo HDB3Jacqueline Ponce Pinos100% (1)
- GUIA Laboratorio N 2 Antenas y Medios de Transmision FIEE UNMSMDocumento5 páginasGUIA Laboratorio N 2 Antenas y Medios de Transmision FIEE UNMSMErick Huayhuapuma GonzagaAún no hay calificaciones
- Jerarquia Digital PlesiocronaDocumento4 páginasJerarquia Digital PlesiocronaJaime Humberto Pech CarmonaAún no hay calificaciones
- Telecomunicaciones 1Documento5 páginasTelecomunicaciones 1Linder Frank Alva RiosAún no hay calificaciones
- Semana 7 MultiplexaciónDocumento13 páginasSemana 7 Multiplexacióncarlos7624Aún no hay calificaciones
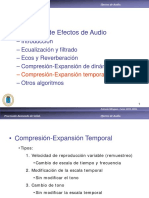
- Efectos de Audio Expasion Compresion Temporal Curso 2015-2016 - v5Documento37 páginasEfectos de Audio Expasion Compresion Temporal Curso 2015-2016 - v5Raúl Herrero MuelaAún no hay calificaciones
- Etiquetas de RadioDocumento6 páginasEtiquetas de RadioMarisa G. RodriguezAún no hay calificaciones
- Capitulo 8 Líneas de TransmisiónDocumento20 páginasCapitulo 8 Líneas de Transmisiónjacojhames0% (1)
- Capacitacion NODOS SG2000Documento24 páginasCapacitacion NODOS SG2000Ingeniero Miguel Buitrago100% (1)
- Guia 4 FinalDocumento6 páginasGuia 4 Finalfabio canchari capchaAún no hay calificaciones
- Manual de Instrucciones ALCOM 255Documento19 páginasManual de Instrucciones ALCOM 255cesaryngwie0% (1)
- MIMODocumento25 páginasMIMOJUCARLCAún no hay calificaciones
- Técnicas de Modulación AnalógicaDocumento6 páginasTécnicas de Modulación AnalógicaJose J Pérez LópezAún no hay calificaciones
- LatexDocumento18 páginasLatexDaniel PancheAún no hay calificaciones
- 1.1 Evolucion de Las Tec - InalambricasDocumento2 páginas1.1 Evolucion de Las Tec - InalambricasjuanAún no hay calificaciones
- Deber 2 SCEDocumento3 páginasDeber 2 SCESteve SolisAún no hay calificaciones
- DTV Modulacion DigitalDocumento28 páginasDTV Modulacion DigitalAlain Dorado ArceAún no hay calificaciones
- Preg Examen Radioaficionados Apendice B Materia Tecnica ASPIRANTEDocumento34 páginasPreg Examen Radioaficionados Apendice B Materia Tecnica ASPIRANTEJuanAún no hay calificaciones
- TIF - Geodesia SatelitalDocumento22 páginasTIF - Geodesia SatelitalJosephCondoriAún no hay calificaciones
- VLFDocumento2 páginasVLFmervin joelAún no hay calificaciones
- Manual Instalacion Prepago UyDocumento21 páginasManual Instalacion Prepago UySantiago OlmedoAún no hay calificaciones
- PFC Javier Hernandez SanchezDocumento156 páginasPFC Javier Hernandez SanchezFrank Pacherre MoralesAún no hay calificaciones
- Los Servicios Móviles de 3GDocumento8 páginasLos Servicios Móviles de 3GRamon VegaAún no hay calificaciones
- Guía #7 Filtros IIR Tranformación BilinealDocumento2 páginasGuía #7 Filtros IIR Tranformación BilinealAdrian VeraAún no hay calificaciones
- Unidad 11 - DefwebDocumento85 páginasUnidad 11 - DefwebAlex Sánchez Mahillo100% (1)