También podría gustarte
- Centroides e InerciaDocumento38 páginasCentroides e InerciaWilliams David PerezAún no hay calificaciones
- ??4°cuaderno Matemáticas de Trabajo AlumnoDocumento158 páginas??4°cuaderno Matemáticas de Trabajo AlumnoLupita Montoya SanchezAún no hay calificaciones
- Electrónica Analógica para Ingenierias Técnicas - Miguel MacíasDocumento313 páginasElectrónica Analógica para Ingenierias Técnicas - Miguel MacíasFrancisco José Ortiz100% (2)
- Columna Fuerte, Viga DebilDocumento6 páginasColumna Fuerte, Viga DebilAdin RodriguezAún no hay calificaciones
- Movimiento Rectilíneo UniformeDocumento8 páginasMovimiento Rectilíneo UniformeWillamsAún no hay calificaciones
- Introducción a la geometría analíticaDe EverandIntroducción a la geometría analíticaCalificación: 4 de 5 estrellas4/5 (1)
- Momento de Inercia de Segundo Orden Resistencia de Materiales IDocumento32 páginasMomento de Inercia de Segundo Orden Resistencia de Materiales IEnmanuel Vidarte Briceño100% (1)
- Centro de Gravedad y Momento de Inercia de Areas PlanasDocumento14 páginasCentro de Gravedad y Momento de Inercia de Areas PlanasGuillermo MendózaAún no hay calificaciones
- 5.3 Movimento Angular de Un Cuerpo Rigido en El PlanoDocumento6 páginas5.3 Movimento Angular de Un Cuerpo Rigido en El PlanoEdwin López50% (2)
- Simulacion Por Computadora Del Potencial de Acción FISIOLOGÍA ENCBDocumento14 páginasSimulacion Por Computadora Del Potencial de Acción FISIOLOGÍA ENCBunariveraAún no hay calificaciones
- Fibras y Microfibras para Concreto y MorterosDocumento33 páginasFibras y Microfibras para Concreto y MorterosYudy CastroAún no hay calificaciones
- Almidón Soluble MerckDocumento0 páginasAlmidón Soluble MerckAlex CárdenasAún no hay calificaciones
- Producto de InerciaDocumento21 páginasProducto de InerciabrayanAún no hay calificaciones
- Intergard 251Documento4 páginasIntergard 251Jonny LopezAún no hay calificaciones
- Propiedades de Areas PlanasDocumento16 páginasPropiedades de Areas PlanasCarolina HerreraAún no hay calificaciones
- MOMENTOS 2do ORDEN DE SUPERFICIES - INERCIADocumento21 páginasMOMENTOS 2do ORDEN DE SUPERFICIES - INERCIAJorAún no hay calificaciones
- Secciones PlanasDocumento21 páginasSecciones PlanasHector ZavalaAún no hay calificaciones
- 09 Apéndice, Momentos y Productos de InerciaDocumento13 páginas09 Apéndice, Momentos y Productos de InerciaYaMii CpeDaAún no hay calificaciones
- Centroides y Momentos de Inercia PracticaDocumento5 páginasCentroides y Momentos de Inercia PracticaFaury FelizAún no hay calificaciones
- Ejes GiradosDocumento19 páginasEjes GiradosAnny CatAún no hay calificaciones
- La SenoideDocumento6 páginasLa SenoideMallely JinxAún no hay calificaciones
- Centroides e InerciaDocumento67 páginasCentroides e InerciaJorgeAndresVargasLaraAún no hay calificaciones
- Momento de InerciaDocumento7 páginasMomento de InerciaMarcelo Alexandro Pontio CataldoAún no hay calificaciones
- 7 Momentos de InerciaDocumento24 páginas7 Momentos de InerciaDaniel CañonAún no hay calificaciones
- Momento Polar de InerciaDocumento8 páginasMomento Polar de Inerciafranz rojas machadoAún no hay calificaciones
- Momentos Polares de Inercia 2Documento5 páginasMomentos Polares de Inercia 2Franz Ever Quispe MolloAún no hay calificaciones
- Momentos de Inercia de AreaDocumento11 páginasMomentos de Inercia de AreaJeiser VasquezAún no hay calificaciones
- CaballeraDocumento3 páginasCaballeraCarmen Orozco de PáramoAún no hay calificaciones
- Trabajo Practico N6Documento4 páginasTrabajo Practico N6orianaalfonso1975Aún no hay calificaciones
- Cinética Tridimensional de Un Cuerpo RígidoDocumento49 páginasCinética Tridimensional de Un Cuerpo RígidoJhonatan Chamorro CervantesAún no hay calificaciones
- INERCIASDocumento9 páginasINERCIASAngel Yair Gonzalez LlamasAún no hay calificaciones
- Momentos de InerciaDocumento9 páginasMomentos de InerciaMónica MendozaAún no hay calificaciones
- Producto de InerciaDocumento17 páginasProducto de InerciaChunmao DingAún no hay calificaciones
- ESTADO DE DEFORMACIÓN en Un Punto Continuo PDFDocumento48 páginasESTADO DE DEFORMACIÓN en Un Punto Continuo PDFMathias Ivan Morck avellanedaAún no hay calificaciones
- Semana 05Documento53 páginasSemana 05Maicol HuanqqueAún no hay calificaciones
- Tensores Cartesianos para Rotación de ElipsoideDocumento11 páginasTensores Cartesianos para Rotación de ElipsoideRMolina65Aún no hay calificaciones
- Winkler BachDocumento8 páginasWinkler BachMatías TolkienAún no hay calificaciones
- Momentos de Inercia para Un Area Con Respecto A Ejes InclinadosDocumento3 páginasMomentos de Inercia para Un Area Con Respecto A Ejes InclinadosCarlosGrandaSarmientoAún no hay calificaciones
- Algunos Tensores de Segundo OrdenDocumento19 páginasAlgunos Tensores de Segundo OrdenAMYNNXXXXAún no hay calificaciones
- HUOLDocumento13 páginasHUOLZabdy ZavalaAún no hay calificaciones
- Equilibrio - MomentoDocumento141 páginasEquilibrio - MomentoJoel García100% (1)
- Lineas de InfluenciaDocumento37 páginasLineas de Influenciagrupomailing9165Aún no hay calificaciones
- Unidad 4 Momento de Inercia 1Documento14 páginasUnidad 4 Momento de Inercia 1Luis GarciaAún no hay calificaciones
- Momento de Inercia de Un ÁreaDocumento14 páginasMomento de Inercia de Un ÁreaFreddy Vargas50% (2)
- Dinamica GermaniaDocumento11 páginasDinamica Germaniaanthony acuñaAún no hay calificaciones
- InerciaDocumento34 páginasInerciaNicolas Prado OrellanaAún no hay calificaciones
- 02 - Unidad #02 - Geometría de Las SuperficiesDocumento25 páginas02 - Unidad #02 - Geometría de Las SuperficiesMax PowerAún no hay calificaciones
- Guía Momentos de InerciaDocumento10 páginasGuía Momentos de InerciajosedagracaAún no hay calificaciones
- Cinética Tridimensional de Un Cuerpo RígidoDocumento5 páginasCinética Tridimensional de Un Cuerpo RígidoJhonatan Chamorro CervantesAún no hay calificaciones
- 142 Movimiento CircularDocumento18 páginas142 Movimiento Circularmechanical15Aún no hay calificaciones
- 11 - Cinética TridimensionalDocumento69 páginas11 - Cinética TridimensionalErcilia Eulalia MaldonadoAún no hay calificaciones
- Introducción Resistencia de MaterialesDocumento35 páginasIntroducción Resistencia de MaterialesJEAnimations FoxAún no hay calificaciones
- Setima ClaseDocumento55 páginasSetima ClaseMilton Inga100% (1)
- Diagrama de Cortante y Momento Metodo de Areas PDFDocumento13 páginasDiagrama de Cortante y Momento Metodo de Areas PDFZabdy ZavalaAún no hay calificaciones
- Inercia y Perfiles Comerciales - Resistencia de Materiales 2016Documento9 páginasInercia y Perfiles Comerciales - Resistencia de Materiales 2016Aldo Abarca OrtegaAún no hay calificaciones
- Estatica Momentos de Inercia .Documento27 páginasEstatica Momentos de Inercia .AlexanderGermainAún no hay calificaciones
- CIrcunferencia de MohrDocumento7 páginasCIrcunferencia de MohralejoelingAún no hay calificaciones
- 7.1 Círculo TrigonómetricoDocumento20 páginas7.1 Círculo TrigonómetricoVale GonzalezAún no hay calificaciones
- 06 - Movimiento Plano Paralelo Del Cuerpo RigidoDocumento31 páginas06 - Movimiento Plano Paralelo Del Cuerpo RigidoTUmamaAún no hay calificaciones
- Ecuación de Alabeo Unitario: Prisma MecánicoDocumento3 páginasEcuación de Alabeo Unitario: Prisma MecániconestorAún no hay calificaciones
- Capitulo13 Esfuerzo Axil y Momento Flector en Barras Rectas.Documento34 páginasCapitulo13 Esfuerzo Axil y Momento Flector en Barras Rectas.Cadenas de MarkovAún no hay calificaciones
- UNIDAD 04 Mecanica RacionalDocumento34 páginasUNIDAD 04 Mecanica RacionalRenzo TiconaAún no hay calificaciones
- Proyección isométrica: Explorando la percepción espacial en la visión por computadoraDe EverandProyección isométrica: Explorando la percepción espacial en la visión por computadoraAún no hay calificaciones
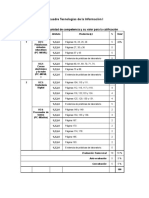
- Encuadre Tecnologías de La Información IDocumento2 páginasEncuadre Tecnologías de La Información ITania Esmeralda González RoblesAún no hay calificaciones
- Elaboración de Cuadro SinopticoDocumento3 páginasElaboración de Cuadro SinopticoTania Esmeralda González RoblesAún no hay calificaciones
- Propiedades de Las SeccionesDocumento54 páginasPropiedades de Las SeccionesTania Esmeralda González RoblesAún no hay calificaciones
- Resistencia de MaterialesDocumento43 páginasResistencia de MaterialesTania Esmeralda González RoblesAún no hay calificaciones
- Medicion de Resistencia Al CorteDocumento50 páginasMedicion de Resistencia Al CorteJorge Braulio Rivera AyalaAún no hay calificaciones
- Empuje y FlotaciónDocumento23 páginasEmpuje y Flotaciónatilio martinezAún no hay calificaciones
- Manual para El Manejo de Los Big BagsDocumento12 páginasManual para El Manejo de Los Big BagsSASSO GROAún no hay calificaciones
- Trigo No Me TriaDocumento61 páginasTrigo No Me TriaEdwin SantiAún no hay calificaciones
- Momento Con Respecto A Un PuntoDocumento14 páginasMomento Con Respecto A Un Puntojeffer2storyAún no hay calificaciones
- Longitud de ArcoDocumento7 páginasLongitud de ArcoDelmiza Esquivel IngaAún no hay calificaciones
- Contestar y Entregar El CuestionarioDocumento5 páginasContestar y Entregar El CuestionarioDanna Cruz MunguíaAún no hay calificaciones
- Miguel Angel Segura Figueroa G3Documento16 páginasMiguel Angel Segura Figueroa G3Miguel Angel Segura FigueroaAún no hay calificaciones
- Trigonometría 1° Sec.Documento47 páginasTrigonometría 1° Sec.carlosAún no hay calificaciones
- Cartas de ControlDocumento4 páginasCartas de ControlFransisAún no hay calificaciones
- ABB Arrancador SuaveDocumento16 páginasABB Arrancador SuaveWilliam PinzonAún no hay calificaciones
- Lista 2 MeDocumento2 páginasLista 2 MejesusAún no hay calificaciones
- Mem - Cal.RBO 261014Documento4 páginasMem - Cal.RBO 261014f3r_nano9074Aún no hay calificaciones
- Lección 3Documento2 páginasLección 3Pablo Martinez MingaAún no hay calificaciones
- Cap. 9 Momento de InérciaDocumento20 páginasCap. 9 Momento de InérciaFádia LimaAún no hay calificaciones
- QamDocumento7 páginasQamGraciela ArchilaAún no hay calificaciones
- Ala PerfilDocumento8 páginasAla PerfilWalter LozaAún no hay calificaciones
- GeranioDocumento18 páginasGeranioJohn Gonzales100% (2)
- Uniones PermanentesDocumento13 páginasUniones PermanentesCarlos Alberto Torres Espinoza100% (1)
- Laboratorio 5 - 2017Documento9 páginasLaboratorio 5 - 2017Luis Alfredo Graus NeciosupAún no hay calificaciones
- Tarea 3 Reduccion de SistemasDocumento15 páginasTarea 3 Reduccion de SistemasJunior FigueroaAún no hay calificaciones
- El Poder de Las Palabras Kevin Hall PDFDocumento87 páginasEl Poder de Las Palabras Kevin Hall PDFVerdeamorAún no hay calificaciones