También podría gustarte
- Instrumentos Del AvionDocumento111 páginasInstrumentos Del AvionJET MAN SKY100% (1)
- Proceso de Extracción Por Solvente de Cobre - SXDocumento19 páginasProceso de Extracción Por Solvente de Cobre - SXjeff enriquezAún no hay calificaciones
- Giro CompasDocumento10 páginasGiro CompasBenjamin RodriguezAún no hay calificaciones
- Fisica Trabajo de Investigacion FISICA EN LA BICICLETADocumento15 páginasFisica Trabajo de Investigacion FISICA EN LA BICICLETAJanet Norma Zea RojasAún no hay calificaciones
- Curso EwDocumento23 páginasCurso Ewjeff enriquezAún no hay calificaciones
- Expo ScadaDocumento19 páginasExpo Scadajeff enriquezAún no hay calificaciones
- Comunicación Con Enjambre de Satélites para Detección de Ondas de Radio Menores A 30MHzDocumento2 páginasComunicación Con Enjambre de Satélites para Detección de Ondas de Radio Menores A 30MHzjeff enriquezAún no hay calificaciones
- Organizador GraficoDocumento2 páginasOrganizador Graficojeff enriquezAún no hay calificaciones
- Organizador GraficoDocumento2 páginasOrganizador Graficojeff enriquezAún no hay calificaciones
- Expo ScadaDocumento19 páginasExpo Scadajeff enriquezAún no hay calificaciones
- Expo ScadaDocumento19 páginasExpo Scadajeff enriquezAún no hay calificaciones
- Revision 1Documento13 páginasRevision 1jeff enriquezAún no hay calificaciones
- Revision Paper 2Documento6 páginasRevision Paper 2jeff enriquezAún no hay calificaciones
- Matricula 2021Documento5 páginasMatricula 2021jeff enriquezAún no hay calificaciones
- Cod - Rtos EjemploDocumento3 páginasCod - Rtos Ejemplojeff enriquezAún no hay calificaciones
- Revision Paper 1Documento8 páginasRevision Paper 1jeff enriquezAún no hay calificaciones
- Exposicion Laboral A Agentes FisicosDocumento213 páginasExposicion Laboral A Agentes Fisicosjeff enriquezAún no hay calificaciones
- HORARIO1Documento1 páginaHORARIO1jeff enriquezAún no hay calificaciones
- Riesgos Fisicos Salud Ocupacional 151007150736 Lva1 App6891Documento44 páginasRiesgos Fisicos Salud Ocupacional 151007150736 Lva1 App6891Marce AriasAún no hay calificaciones
- Deshidratado de Vegetales 2013Documento56 páginasDeshidratado de Vegetales 2013Franco Alexander Castro Barreto100% (1)
- Sostenimiento para Marco TeoricoDocumento16 páginasSostenimiento para Marco TeoricoAdrian PavilionAún no hay calificaciones
- Módulos de Hardware Que Tiene Tu CelularDocumento4 páginasMódulos de Hardware Que Tiene Tu CelularJuan C Robles Lamas50% (2)
- Informe Topografía - Planimetría MineraDocumento72 páginasInforme Topografía - Planimetría Minerapablinarq100% (1)
- Torque GiroscópicoDocumento10 páginasTorque GiroscópicoIvan GarzonAún no hay calificaciones
- 9 Usar Python GitBookDocumento12 páginas9 Usar Python GitBookJunior FigueroaAún no hay calificaciones
- Cuerpo RigidoDocumento8 páginasCuerpo RigidoDiana R. CermeñoAún no hay calificaciones
- Giro16 08 21Documento59 páginasGiro16 08 21Victor aveiroAún no hay calificaciones
- Ata 34 NavegacionDocumento98 páginasAta 34 NavegacionOscar CuervoAún no hay calificaciones
- GiroscopioDocumento6 páginasGiroscopioamodonenoAún no hay calificaciones
- Manual Funciones Neumatico Motocicleta Importancia Funcionamiento Fuerzas Equilibrio CurvasDocumento8 páginasManual Funciones Neumatico Motocicleta Importancia Funcionamiento Fuerzas Equilibrio CurvasFrancisco DuranAún no hay calificaciones
- Rotación Alrededor de Un Eje MóvilDocumento8 páginasRotación Alrededor de Un Eje MóvilWilliam's Mamani Mancilla100% (2)
- Resumen de El HelicopteroDocumento34 páginasResumen de El HelicopteroManuel EscobarAún no hay calificaciones
- Memoria MecanicaDocumento31 páginasMemoria MecanicaJaviAún no hay calificaciones
- Sensores de Velocidad PDFDocumento54 páginasSensores de Velocidad PDFJavierPari50% (2)
- Nuevos Rumbos en La Perforación Rotativa Direccional: Geoff Downton Trond Skei KlausenDocumento12 páginasNuevos Rumbos en La Perforación Rotativa Direccional: Geoff Downton Trond Skei KlausenDaniel Dennis Escobar SubiranaAún no hay calificaciones
- MultishotDocumento10 páginasMultishotBoris Pacheco100% (1)
- Accidente Vuelo 201 Copa AirlinesDocumento3 páginasAccidente Vuelo 201 Copa AirlinesReinaldo Jose David GalvisAún no hay calificaciones
- Hector SiscoDocumento4 páginasHector Siscojeankeh perezAún no hay calificaciones
- Proyecto Perforacion II XXXXDocumento51 páginasProyecto Perforacion II XXXXCarlos GonzalezAún no hay calificaciones
- Cap 6 Dinamica de RotacionDocumento63 páginasCap 6 Dinamica de RotacionPeter SilvaAún no hay calificaciones
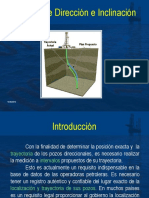
- Medición Dirección e Inclinación PDFDocumento94 páginasMedición Dirección e Inclinación PDFPablo HdzAún no hay calificaciones
- Instrumentos Girosc.Documento54 páginasInstrumentos Girosc.katahua09100% (4)
- CuestionariosDocumento26 páginasCuestionariosLEIDY VANESSA MONTAÑO SAAVEDRAAún no hay calificaciones
- Investigacion Indicador de DireccionDocumento19 páginasInvestigacion Indicador de DireccionSergio AlbertoAún no hay calificaciones
- Modelo Matemático de Un GiroscopioDocumento16 páginasModelo Matemático de Un Giroscopiocrismabo100% (1)
- Tesis Volante de InerciaDocumento32 páginasTesis Volante de InerciaJesus CLAún no hay calificaciones
- Indicadores de VirajeDocumento2 páginasIndicadores de VirajeGuadalupe ValenciaAún no hay calificaciones
- SismosDocumento18 páginasSismosYassir FernandezAún no hay calificaciones