También podría gustarte
- Siso y MimoDocumento5 páginasSiso y MimoDIANA SARAI HERNANDEZ CARRASCOAún no hay calificaciones
- Mimo Vs SisoDocumento20 páginasMimo Vs SisoViviana QV0% (1)
- Antenas MimoDocumento10 páginasAntenas MimoKiller 749Aún no hay calificaciones
- Mimo Vs SisoDocumento13 páginasMimo Vs SisorokajojiAún no hay calificaciones
- Sistemas de Comunicaciones Ópticas MulticanalDocumento18 páginasSistemas de Comunicaciones Ópticas MulticanalPamelaAún no hay calificaciones
- Mimo Vs SisoDocumento13 páginasMimo Vs SisorokajojiAún no hay calificaciones
- Informe OFDMDocumento15 páginasInforme OFDMEdwin VelasteguiAún no hay calificaciones
- MIMO InformeDocumento10 páginasMIMO InformeDiego ApazaAún no hay calificaciones
- Sistema MIMODocumento12 páginasSistema MIMOreynaldo12Aún no hay calificaciones
- Sistemas de Espectro Expandido.Documento13 páginasSistemas de Espectro Expandido.Maxi RamirezAún no hay calificaciones
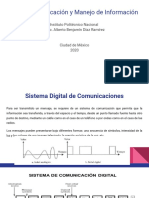
- Sistemas de Comunicación DigitalDocumento6 páginasSistemas de Comunicación DigitalJorgef CondegAún no hay calificaciones
- Universidad Politécnica de Madrid: Autor: Jonathan Mora Cuevas Ingeniero de TelecomunicaciónDocumento262 páginasUniversidad Politécnica de Madrid: Autor: Jonathan Mora Cuevas Ingeniero de TelecomunicaciónDiego Matias OrregoAún no hay calificaciones
- Radio TrunckingDocumento14 páginasRadio TrunckingRafael ArbizuAún no hay calificaciones
- Tarea 6-Luis David Montes TuiranDocumento14 páginasTarea 6-Luis David Montes TuiranferminAún no hay calificaciones
- OK Teoría de Codificación y Manejo de La InformaciónDocumento110 páginasOK Teoría de Codificación y Manejo de La InformaciónIsmael Rojas SantacruzAún no hay calificaciones
- 1P.Deber Nro 1 (T1 - Redes de Comunicación Movil)Documento14 páginas1P.Deber Nro 1 (T1 - Redes de Comunicación Movil)Arturo Daniel CordovaAún no hay calificaciones
- Fundamentos de sistemas de comunicaciones analógicasDe EverandFundamentos de sistemas de comunicaciones analógicasCalificación: 4.5 de 5 estrellas4.5/5 (5)
- Transmision de Datos: 1.multiplexacion TDMDocumento8 páginasTransmision de Datos: 1.multiplexacion TDMANGEL MAURICIO SARMIENTO ZARZOSAAún no hay calificaciones
- U3 Act01 FDT Isc MSGDocumento9 páginasU3 Act01 FDT Isc MSGGonzalo Martinez SilverioAún no hay calificaciones
- Informe Proyecto Segundo BimestreDocumento18 páginasInforme Proyecto Segundo BimestrePriscila FloresAún no hay calificaciones
- Comunicaciones MovilesDocumento6 páginasComunicaciones Movilesjuan gutierresAún no hay calificaciones
- Spread SpectrumDocumento12 páginasSpread SpectrumDiego Fabricio100% (1)
- Metodos de MultiplexacionDocumento31 páginasMetodos de MultiplexacionRicardo Luis Villanueva Ramos100% (1)
- Monografia G04 TcomDocumento11 páginasMonografia G04 TcomAlejandro RamosAún no hay calificaciones
- Trabajo Unidad VDocumento13 páginasTrabajo Unidad VMaxi RamirezAún no hay calificaciones
- 1 Fundamentos de Los Sistemas de Telecomunicaciones 1Documento36 páginas1 Fundamentos de Los Sistemas de Telecomunicaciones 1edison matiasAún no hay calificaciones
- Universidad Nacional Del AltiplanoDocumento16 páginasUniversidad Nacional Del AltiplanoAsqui Dayron NelsonAún no hay calificaciones
- Informe de PSKDocumento19 páginasInforme de PSKHolger ChambaAún no hay calificaciones
- .2015 Radio Enlaces Digitales Con Linea de Vista Capitulo 3 Freddman y MasDocumento67 páginas.2015 Radio Enlaces Digitales Con Linea de Vista Capitulo 3 Freddman y MasJorge Enrique Herrera RubioAún no hay calificaciones
- Cuestionario TerminadoDocumento5 páginasCuestionario TerminadoViviana RojasAún no hay calificaciones
- Sistemas de Comunicaciones Ópticas MulticanalDocumento15 páginasSistemas de Comunicaciones Ópticas MulticanalJesús Alfredo100% (1)
- Sistemas de Comunicación TroncalizadosDocumento21 páginasSistemas de Comunicación TroncalizadosFrancys Maria100% (1)
- Clase 8 Evolución TecnológicaDocumento16 páginasClase 8 Evolución TecnológicaJosé Luis PomaAún no hay calificaciones
- Diseño de Una Antena Patch Microstrip A 2.4GHZ Con Diferentes SustratosDocumento33 páginasDiseño de Una Antena Patch Microstrip A 2.4GHZ Con Diferentes SustratosFernanda Cruz100% (1)
- Resolución BalotarioDocumento8 páginasResolución BalotarioFranklin Callalli AcostaAún no hay calificaciones
- TDMDocumento6 páginasTDMJP Cylia ToapantaAún no hay calificaciones
- MIMODocumento19 páginasMIMOOscar Pardo PardoAún no hay calificaciones
- Mimo Resumido DefinitivoDocumento17 páginasMimo Resumido DefinitivoAlejandro ColinaAún no hay calificaciones
- Tecnologia MimoDocumento27 páginasTecnologia MimoGalo Roberto Aguirre CoboAún no hay calificaciones
- Trabajo 2 Telecomunicacion IntensivaDocumento24 páginasTrabajo 2 Telecomunicacion IntensivaomarAún no hay calificaciones
- Anexo 2Documento18 páginasAnexo 2Damian PrimoAún no hay calificaciones
- Bloques de Un Sistema de Comunicacion Digital Y AnalogicoDocumento14 páginasBloques de Un Sistema de Comunicacion Digital Y AnalogicoMarlon Geovanny Varela PiguaveAún no hay calificaciones
- Modulacion DigitalDocumento10 páginasModulacion DigitalCarlos FloresAún no hay calificaciones
- Mayorga Hilario Ivan 1713220193 Fibras Opticas Tarea 2Documento5 páginasMayorga Hilario Ivan 1713220193 Fibras Opticas Tarea 2Iván Fernando Mayorga Hilario100% (1)
- Transmisión de DatosDocumento27 páginasTransmisión de DatosPedroAún no hay calificaciones
- Tarea 1 Identificar Los Sistemas de ComunicacionesDocumento11 páginasTarea 1 Identificar Los Sistemas de Comunicacionesalex de armas67% (3)
- Comunicaciones IndustrialesDocumento38 páginasComunicaciones IndustrialesNelson Roa100% (3)
- Comunicaciones Caóticas PDFDocumento31 páginasComunicaciones Caóticas PDFRuddy TCAún no hay calificaciones
- Modulo Gsm-Gprs (GPS) de SiemensDocumento13 páginasModulo Gsm-Gprs (GPS) de Siemensmaury_twAún no hay calificaciones
- Módulo de Comunicaciones MóvilesDocumento71 páginasMódulo de Comunicaciones MóvilesTati AnitaAún no hay calificaciones
- Sistema de Transmision de Datos Via Laser Como Solucion de Ultima Milla PDFDocumento7 páginasSistema de Transmision de Datos Via Laser Como Solucion de Ultima Milla PDFCarlos Terraza OyagaAún no hay calificaciones
- Ensayo TeleprocesosDocumento12 páginasEnsayo TeleprocesosJuan Carlos NúñezAún no hay calificaciones
- Presentacion MIMODocumento40 páginasPresentacion MIMOJose RodriguezAún no hay calificaciones
- Señalización y Diferentes TiposDocumento10 páginasSeñalización y Diferentes TiposNathalie OrtegonAún no hay calificaciones
- Presentacion - WimaxDocumento71 páginasPresentacion - WimaxKarolain Tiburcio PAún no hay calificaciones
- MULTICANALIZACIONDocumento11 páginasMULTICANALIZACIONDanner BlancoAún no hay calificaciones
- Transmision Digital en Banda Base Grupo 5 Fase 3Documento18 páginasTransmision Digital en Banda Base Grupo 5 Fase 3Nelson fabianAún no hay calificaciones
- Medios Alambricos y PSTNDocumento39 páginasMedios Alambricos y PSTNpatycillarAún no hay calificaciones
- Antenas Inteligentes oDocumento5 páginasAntenas Inteligentes o14278090Aún no hay calificaciones
- Clase 1 TeleIIIDocumento20 páginasClase 1 TeleIIIDavid CordovaAún no hay calificaciones
- Investigacion Que Es El ControlDocumento9 páginasInvestigacion Que Es El ControlAntonio Elvira SanchezAún no hay calificaciones
- Investigación de La Unidad 4Documento16 páginasInvestigación de La Unidad 4Antonio Elvira SanchezAún no hay calificaciones
- Exposición Programación AvanzadaDocumento13 páginasExposición Programación AvanzadaAntonio Elvira SanchezAún no hay calificaciones
- Protocolo de Investigacion Del IguanarioDocumento83 páginasProtocolo de Investigacion Del IguanarioAntonio Elvira Sanchez0% (1)
- Investigación de La Unidad 4Documento16 páginasInvestigación de La Unidad 4Antonio Elvira SanchezAún no hay calificaciones
- Guion LiterarioDocumento2 páginasGuion LiterarioAracelis PaoliniAún no hay calificaciones
- m221 Es v01 0000.odtDocumento27 páginasm221 Es v01 0000.odtGrohe MantenimientosAún no hay calificaciones
- Esquema Artefactos Resonancia MagnéticaDocumento3 páginasEsquema Artefactos Resonancia MagnéticaAna Cristina Jiménez LópezAún no hay calificaciones
- Plano de Independización - Genesis Leiva (Cumbray) - A3Documento1 páginaPlano de Independización - Genesis Leiva (Cumbray) - A3elvisAún no hay calificaciones
- Cuadro de Turnos Agosto 2022 NDocumento1 páginaCuadro de Turnos Agosto 2022 NKarol portillaAún no hay calificaciones
- Medidas de Seguridad Básica Es La Estación de Radioaficionado Por XE1JEG Eduardo DDocumento16 páginasMedidas de Seguridad Básica Es La Estación de Radioaficionado Por XE1JEG Eduardo Dvictor perezAún no hay calificaciones
- Espectro ElectromagneticoDocumento2 páginasEspectro ElectromagneticoNadia AcostaAún no hay calificaciones
- Comunicación Organizacional en Clave Sonora El Caso de Blink, Los Podcasts de BBVADocumento9 páginasComunicación Organizacional en Clave Sonora El Caso de Blink, Los Podcasts de BBVAJoaquin Gabriel Arteaga MillonesAún no hay calificaciones
- Fase 2 - JOSE VILLOTADocumento6 páginasFase 2 - JOSE VILLOTAAndres CriolloAún no hay calificaciones
- FECDocumento8 páginasFECCarlos Salazar OrtizAún no hay calificaciones
- Experimento 1 SDocumento6 páginasExperimento 1 SGaus Gonzales SáenzAún no hay calificaciones
- Radioaficionados - ENACOMDocumento15 páginasRadioaficionados - ENACOMnsolopAún no hay calificaciones
- FMT-2020 Manual LowDocumento1 páginaFMT-2020 Manual LowRodrigo Sánchez HernándezAún no hay calificaciones
- 26 Fallas Generales en Receptores de TVDocumento11 páginas26 Fallas Generales en Receptores de TVJavier RiveroAún no hay calificaciones
- ApartarayosDocumento36 páginasApartarayosEmmanuel Elizalde Cortes100% (1)
- Aspectos Generales DANIELADocumento6 páginasAspectos Generales DANIELAdanielabossaAún no hay calificaciones
- Reglamento de Radiodifusión Sonora y Televisión Abierta Comunitarias de Servicio Público Sin Fines de LucroDocumento12 páginasReglamento de Radiodifusión Sonora y Televisión Abierta Comunitarias de Servicio Público Sin Fines de LucroMaite Gabriella Ramos100% (1)
- Lenguaje e InformacionDocumento24 páginasLenguaje e InformacionYeleangel MartinezAún no hay calificaciones
- Comunicacion Social Frank SinatraDocumento13 páginasComunicacion Social Frank SinatraJoseph N. MartinezAún no hay calificaciones
- Modelo de Proyecto para Programa RadialDocumento4 páginasModelo de Proyecto para Programa RadialJosé Manuel Lozada NovellAún no hay calificaciones
- Manual Vernier MitutoyoDocumento2 páginasManual Vernier MitutoyoRob CAún no hay calificaciones
- 1.antenas ResumenDocumento6 páginas1.antenas ResumenGerardo Lucio Salazar AndradeAún no hay calificaciones
- Manual Instructivo Instalacion y Mantenimiento Alarmas de Pozos 2017Documento6 páginasManual Instructivo Instalacion y Mantenimiento Alarmas de Pozos 2017Emmanuel Sanchez NuñezAún no hay calificaciones
- Fundamentos Del Proceso ComunicativoDocumento19 páginasFundamentos Del Proceso ComunicativoNorberto Alejandro Ordinario de ArcosAún no hay calificaciones
- Diferencias Entre Neumáticos Radial y DiagonalDocumento6 páginasDiferencias Entre Neumáticos Radial y DiagonalEdwin TtitoAún no hay calificaciones
- Anexo 1 Escenarios Sin ConectividadDocumento2 páginasAnexo 1 Escenarios Sin ConectividadAnggi EnriquezAún no hay calificaciones
- Clasificación de Los LocutoresDocumento3 páginasClasificación de Los LocutoresVerónica Madrigal RiveraAún no hay calificaciones
- Presentación - FM EstereofónicaDocumento27 páginasPresentación - FM EstereofónicaMax AlvarezAún no hay calificaciones
- Módulo 2 Radio y ProduccionDocumento4 páginasMódulo 2 Radio y ProduccionXroZAún no hay calificaciones
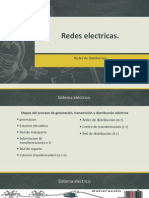
- Redes ElectricasDocumento10 páginasRedes ElectricasChristian Samario Street Cardenas BavestrelloAún no hay calificaciones