También podría gustarte
- Preparatorio 9 FPolancoDocumento8 páginasPreparatorio 9 FPolancoFaustoPolancoAriasAún no hay calificaciones
- Ginlong GCI-5K Manual - En.esDocumento21 páginasGinlong GCI-5K Manual - En.esFaustoPolancoAriasAún no hay calificaciones
- MANUAL WC GRID EsDocumento10 páginasMANUAL WC GRID EsFaustoPolancoAriasAún no hay calificaciones
- Manual n1020 v11x F SpanishDocumento8 páginasManual n1020 v11x F SpanishFaustoPolancoAriasAún no hay calificaciones
- Vacuna FaustoDocumento2 páginasVacuna FaustoFaustoPolancoAriasAún no hay calificaciones
- Preparatorio 2 Fausto PolancoDocumento7 páginasPreparatorio 2 Fausto PolancoFaustoPolancoAriasAún no hay calificaciones
- Preparatorio1 Fausto PolancoDocumento9 páginasPreparatorio1 Fausto PolancoFaustoPolancoAriasAún no hay calificaciones
- Resumen Conferencia FPolancoDocumento5 páginasResumen Conferencia FPolancoFaustoPolancoAriasAún no hay calificaciones
- Introduccion 21aDocumento21 páginasIntroduccion 21aFaustoPolancoAriasAún no hay calificaciones
- Informe Grupo7Documento11 páginasInforme Grupo7FaustoPolancoAriasAún no hay calificaciones
- INFORMES4Documento19 páginasINFORMES4FaustoPolancoAriasAún no hay calificaciones
- Preparatorio 3 Fausto PolancoDocumento6 páginasPreparatorio 3 Fausto PolancoFaustoPolancoAriasAún no hay calificaciones
- Informe 2Documento13 páginasInforme 2FaustoPolancoAriasAún no hay calificaciones
- I4 GuerreroLopezPolancoDocumento19 páginasI4 GuerreroLopezPolancoFaustoPolancoAriasAún no hay calificaciones
- Parte 1Documento5 páginasParte 1FaustoPolancoAriasAún no hay calificaciones
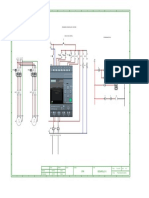
- PDF Cade SimuDocumento1 páginaPDF Cade SimuFaustoPolancoAriasAún no hay calificaciones
- Actividad de Puntos Evaluables - Escenario 2 - SEGUNDO BLOQUE-CIENCIAS BASICAS - MATEMATICAS - (GRUPO B03)Documento7 páginasActividad de Puntos Evaluables - Escenario 2 - SEGUNDO BLOQUE-CIENCIAS BASICAS - MATEMATICAS - (GRUPO B03)Erika D100% (1)
- Circuitos Lógicos CombinacionalesDocumento30 páginasCircuitos Lógicos CombinacionalesEdmundo MarinAún no hay calificaciones
- Data Sheet VentosaDocumento2 páginasData Sheet VentosaSergio GomezAún no hay calificaciones
- Guia01 ATMega328PDocumento4 páginasGuia01 ATMega328PEnrique Villegas MedinaAún no hay calificaciones
- Control de LecturaDocumento3 páginasControl de LecturaRafael Mora Ramirez60% (5)
- IV. Dante Alighieri - Paraíso Canto XXXIIIDocumento6 páginasIV. Dante Alighieri - Paraíso Canto XXXIIIDaniela ArandaAún no hay calificaciones
- Antecedentes Históricos Del Dibujo TécnicoDocumento6 páginasAntecedentes Históricos Del Dibujo TécnicoAlan García-TrejoAún no hay calificaciones
- NIIF 9 - Instrumentos Financieros PDFDocumento159 páginasNIIF 9 - Instrumentos Financieros PDFDavid Sánchez AranzaAún no hay calificaciones
- Taller 2-II-2017 para EntregarDocumento1 páginaTaller 2-II-2017 para EntregarKarenBonilla0% (1)
- MentoplastiaDocumento13 páginasMentoplastiaIsmael Erazo AstudilloAún no hay calificaciones
- Tarea - Semana - 3-Algebra SuperiorDocumento8 páginasTarea - Semana - 3-Algebra SuperiorBraian Nicolas Camargo GómezAún no hay calificaciones
- Capa MAC IEEE 80211Documento20 páginasCapa MAC IEEE 80211Franco TacconiAún no hay calificaciones
- Bautuff 302NGDocumento2 páginasBautuff 302NGfrancisca ferrerAún no hay calificaciones
- Analisis de Muros Anem PDFDocumento5 páginasAnalisis de Muros Anem PDFWilfredo Subero BAún no hay calificaciones
- ntc2 Norma NTC 2 Siderurgia Ensayo de Traccion para Materiales Metalicos MetodoDocumento35 páginasntc2 Norma NTC 2 Siderurgia Ensayo de Traccion para Materiales Metalicos MetodojohanAún no hay calificaciones
- Tablas de Perfiles Del CirsocDocumento21 páginasTablas de Perfiles Del CirsocMauricio SanchezAún no hay calificaciones
- Vibraciones MecanicasDocumento21 páginasVibraciones MecanicasCESARAún no hay calificaciones
- Glacioclim: Zongo - Chacaltaya - Charquini SurDocumento170 páginasGlacioclim: Zongo - Chacaltaya - Charquini SurLuis Felipe Román OsorioAún no hay calificaciones
- Leonardo Pablo Contreras - AED6TP1Documento11 páginasLeonardo Pablo Contreras - AED6TP1Leonardo ContrerasAún no hay calificaciones
- Wuolah Free Comandos Mathematica Matematica DiscretaDocumento38 páginasWuolah Free Comandos Mathematica Matematica DiscretaMari GómezAún no hay calificaciones
- Electromagnetismo Labo8 (Fisica San Marcos)Documento23 páginasElectromagnetismo Labo8 (Fisica San Marcos)montalvo00Aún no hay calificaciones
- NormalizacionDocumento25 páginasNormalizacionjeanc25Aún no hay calificaciones
- Gabriel LippmannDocumento4 páginasGabriel LippmannAndy GomezAún no hay calificaciones
- Estática - EquilibrioDocumento7 páginasEstática - EquilibrioAlejo AlbornozAún no hay calificaciones
- Unal 2021Documento4 páginasUnal 2021Luis SeguraAún no hay calificaciones
- Cinetica QuimicaDocumento22 páginasCinetica QuimicaRamiro BritoAún no hay calificaciones
- Análisis VectorialDocumento2 páginasAnálisis VectorialMauricio Chavez DiazAún no hay calificaciones
- Formulario InventariosDocumento6 páginasFormulario InventariosNEO300Aún no hay calificaciones
- Proyecto BioplasticoDocumento18 páginasProyecto BioplasticoHELEN MANZANOAún no hay calificaciones