También podría gustarte
- Tarea 04Documento9 páginasTarea 04juancitoAún no hay calificaciones
- PDF Informe 13 Instrumentacion Industrial DLDocumento33 páginasPDF Informe 13 Instrumentacion Industrial DLjuancitoAún no hay calificaciones
- s07 - Cálculo de Masa. Centro de Masa. CentroideDocumento14 páginass07 - Cálculo de Masa. Centro de Masa. CentroidejuancitoAún no hay calificaciones
- S13.s1 - Electroquimica OFICIALDocumento20 páginasS13.s1 - Electroquimica OFICIALjuancitoAún no hay calificaciones
- T - Sem 07 - Ses 07 - Micro Taller 04Documento1 páginaT - Sem 07 - Ses 07 - Micro Taller 04juancitoAún no hay calificaciones
- T - Sem 5 - Ses 5 - Micro Taller 03Documento1 páginaT - Sem 5 - Ses 5 - Micro Taller 03juancito100% (1)
- T Sem 09 Ses 10 MicroTaller 05Documento1 páginaT Sem 09 Ses 10 MicroTaller 05juancitoAún no hay calificaciones
- T - Sem 13 - Ses 13 - Micro Taller 07Documento2 páginasT - Sem 13 - Ses 13 - Micro Taller 07juancitoAún no hay calificaciones
- T - Taller Calificado 01 - Sem 4 - Ses 4Documento2 páginasT - Taller Calificado 01 - Sem 4 - Ses 4juancitoAún no hay calificaciones
- T - Sem 08 - Ses 08 - Taller Examen ParcialDocumento3 páginasT - Sem 08 - Ses 08 - Taller Examen ParcialjuancitoAún no hay calificaciones
- S07.s1 - Equilibrio IónicoDocumento19 páginasS07.s1 - Equilibrio IónicojuancitoAún no hay calificaciones
- T Sem 11 Ses 11 MicroTaller 06Documento1 páginaT Sem 11 Ses 11 MicroTaller 06juancitoAún no hay calificaciones
- T - Sem 12 - Ses 12 - Taller para La PC2 - QIDocumento3 páginasT - Sem 12 - Ses 12 - Taller para La PC2 - QIjuancitoAún no hay calificaciones
- S03.s1 - Material ComplementarioDocumento9 páginasS03.s1 - Material ComplementariojuancitoAún no hay calificaciones
- S06.s1 - Introducción A Los Ácidos y BasesDocumento19 páginasS06.s1 - Introducción A Los Ácidos y BasesjuancitoAún no hay calificaciones
- S14.s1 - Material - Celdas ElectrolíticasDocumento26 páginasS14.s1 - Material - Celdas ElectrolíticasjuancitoAún no hay calificaciones
- S01. s2 - Elasticidad-ClaseDocumento28 páginasS01. s2 - Elasticidad-ClasejuancitoAún no hay calificaciones
- Cálculo Aplicado A La Física 1Documento19 páginasCálculo Aplicado A La Física 1juancitoAún no hay calificaciones
- S09.s1 - Introducción A La TermodinámicaDocumento30 páginasS09.s1 - Introducción A La TermodinámicajuancitoAún no hay calificaciones
- Lectura 7Documento6 páginasLectura 7juancitoAún no hay calificaciones
- MT-233A 2021 Lab1Documento5 páginasMT-233A 2021 Lab1juancitoAún no hay calificaciones
- MT-233-20202 - Semana 6Documento71 páginasMT-233-20202 - Semana 6juancitoAún no hay calificaciones
- RISSO Rev.02 Sugerencias (2022)Documento55 páginasRISSO Rev.02 Sugerencias (2022)VilmaAún no hay calificaciones
- Celdas SolaresDocumento3 páginasCeldas SolaresjorsaezAún no hay calificaciones
- Informe de Prevencion de Riesgos AccidentabilidadDocumento5 páginasInforme de Prevencion de Riesgos AccidentabilidadChristopherAún no hay calificaciones
- Practica Plc2 2013Documento2 páginasPractica Plc2 2013Humberto García ArráizAún no hay calificaciones
- Caso SpotifyDocumento5 páginasCaso SpotifyRamosManzanoMarianoAún no hay calificaciones
- Gertudris en Casa LamotaDocumento7 páginasGertudris en Casa LamotaAlfredo Armando AguirreAún no hay calificaciones
- Ejercicios Resueltos de Diseños de ZapatasDocumento156 páginasEjercicios Resueltos de Diseños de Zapatashelygiovanny75% (8)
- Sesion PersonalDocumento3 páginasSesion PersonalRUTH KARINA ORTEGA LOAAún no hay calificaciones
- Modulo 4Documento62 páginasModulo 4natalicall100% (1)
- Manual de Usuario UnitexDocumento17 páginasManual de Usuario UnitexAlex Fernando Buitrago HurtadoAún no hay calificaciones
- PURATOSDocumento1 páginaPURATOSEdggar Lushiiz Rawirrez SAaveedraAún no hay calificaciones
- Diagnostico Relacion Mandante-Contratista 2006Documento0 páginasDiagnostico Relacion Mandante-Contratista 2006Juan Camilo Aldana BarreraAún no hay calificaciones
- Especificaciones Tecnicas Templo Crdi MaipuDocumento13 páginasEspecificaciones Tecnicas Templo Crdi MaipuedoAún no hay calificaciones
- Eficiencia Del Cuerpo HumanoDocumento3 páginasEficiencia Del Cuerpo HumanoHelda Belen Ulloa PerezAún no hay calificaciones
- SuperunidadDocumento10 páginasSuperunidadmauro rodriguezAún no hay calificaciones
- Bases LP-0007-2021 Adquisicion de Sistema Fotovoltaico-HUANCAVELICADocumento68 páginasBases LP-0007-2021 Adquisicion de Sistema Fotovoltaico-HUANCAVELICAArturo ValenciaAún no hay calificaciones
- Generador SíncronoDocumento18 páginasGenerador SíncronoCarlos Valdiviezo SaavedraAún no hay calificaciones
- Sigue La HuellaDocumento7 páginasSigue La Huellaabigail daniela arce moreno100% (1)
- Entregable 2 Estadistica AplicadaDocumento4 páginasEntregable 2 Estadistica AplicadaEdwin Salinas HernandezAún no hay calificaciones
- Brochure Diplomado Nacional Corredor Corredor de Seguros Generales y VidaDocumento11 páginasBrochure Diplomado Nacional Corredor Corredor de Seguros Generales y VidaAlejandroAún no hay calificaciones
- Administración de Cuentas Por CobrarDocumento20 páginasAdministración de Cuentas Por CobrarSusana Terrazo Lopez100% (1)
- SESIÓN DE APRENDIZAJE Ciencia y Tecnologia Smaqueta Del Sistema DigestivoDocumento3 páginasSESIÓN DE APRENDIZAJE Ciencia y Tecnologia Smaqueta Del Sistema Digestivoedith rosalinda galvez pezo100% (1)
- Red de Proveedores A Nivel Nacional 27 08 2021 PDFDocumento29 páginasRed de Proveedores A Nivel Nacional 27 08 2021 PDFAnibal SalazarAún no hay calificaciones
- Máquinas y Robots Nos Quitan El EmpleoDocumento5 páginasMáquinas y Robots Nos Quitan El EmpleoANDRES FELIPE BRASVI HERNANDEZAún no hay calificaciones
- Estructura Del HospitalDocumento20 páginasEstructura Del HospitalJulia Ceron CarranzaAún no hay calificaciones
- Intro Ducci On Fi Sica Modern ADocumento367 páginasIntro Ducci On Fi Sica Modern AJulian Orozco HerreraAún no hay calificaciones
- Aplicaciones MovilesDocumento15 páginasAplicaciones Movilescarlos navarro cabanillas67% (3)
- Monitoreo 36 2Documento12 páginasMonitoreo 36 2Laura Lara OrtizAún no hay calificaciones
- Evaluacion Final - Escenario 8 - SEGUNDO BLOQUE-TEORICO - ADMINISTRACION Y GESTION PUBLICA - (GRUPO B14) 1.1Documento10 páginasEvaluacion Final - Escenario 8 - SEGUNDO BLOQUE-TEORICO - ADMINISTRACION Y GESTION PUBLICA - (GRUPO B14) 1.1favio orlando becoche guachetaAún no hay calificaciones
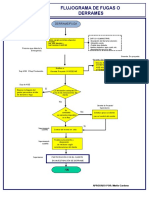
- F-VA Flujo para Emergencias en Caso de Derrame o Fugas Rev.07Documento1 páginaF-VA Flujo para Emergencias en Caso de Derrame o Fugas Rev.07Marbic Cortes100% (1)