También podría gustarte
- Informe 4!Documento6 páginasInforme 4!shamiretAún no hay calificaciones
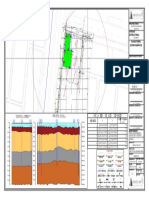
- Plano de Planta y Perfil GeotécnicoDocumento1 páginaPlano de Planta y Perfil GeotécnicoshamiretAún no hay calificaciones
- Memoria de Cálculo Geotecnia IngenicDocumento36 páginasMemoria de Cálculo Geotecnia Ingenicshamiret100% (1)
- Clase 1Documento25 páginasClase 1shamiretAún no hay calificaciones
- Técnicas en Las Artes MusicalesDocumento2 páginasTécnicas en Las Artes MusicalesGloria Betzy Levano MedinaAún no hay calificaciones
- Listados Alternan-2021Documento93 páginasListados Alternan-2021MARIA CAMILA LOPEZ GALVANAún no hay calificaciones
- 3.5 Corona Empañada - Erin WattDocumento164 páginas3.5 Corona Empañada - Erin Wattdosanjosjose272Aún no hay calificaciones
- Cuadro Comparativo Metodos PublicitariosDocumento2 páginasCuadro Comparativo Metodos PublicitariosAnonimo0% (1)
- Qué Es Una Empresa PúblicaDocumento2 páginasQué Es Una Empresa PúblicaLuis Arturo Abanto RabanalAún no hay calificaciones
- Afrodita ADocumento5 páginasAfrodita APedrito JimenezAún no hay calificaciones
- TicketsDocumento2 páginasTicketsAdolfo SamanoAún no hay calificaciones
- Resumen Dixieland, Swing, BebopDocumento3 páginasResumen Dixieland, Swing, BebopSan EsquivelAún no hay calificaciones
- Cartas MMLPDocumento10 páginasCartas MMLPEdwin Enrique Hernandez VelazquezAún no hay calificaciones
- Universidad Nacional Autónoma de NicaraguaDocumento53 páginasUniversidad Nacional Autónoma de NicaraguaEnriqueLópezAráuzAún no hay calificaciones
- After HoursDocumento6 páginasAfter HoursDANIEL ENRIQUE LOPEZ COREASAún no hay calificaciones
- Politicas de SeguridadDocumento5 páginasPoliticas de SeguridadDERLY DAYANA ROMERO BELTRANAún no hay calificaciones
- Módulo 2 - Planificación de La ComunicaciónDocumento43 páginasMódulo 2 - Planificación de La ComunicaciónKlaudy KlauAún no hay calificaciones
- Chilalo 8 de SetiembreDocumento2 páginasChilalo 8 de SetiembreErica Flores jimenezAún no hay calificaciones
- Cifra de CompásDocumento20 páginasCifra de Compásvalentina.rcb06Aún no hay calificaciones
- Análisis de La Película IntouchablesDocumento13 páginasAnálisis de La Película IntouchablesSandrita Lopez0% (1)
- Encuesta Nueva Planta en Piedecuesta - BDDocumento5 páginasEncuesta Nueva Planta en Piedecuesta - BDSneider PalaciosAún no hay calificaciones
- Diferentes Tipos de Unión Del MástilDocumento6 páginasDiferentes Tipos de Unión Del MástilLuis Alberto Salgado CaoAún no hay calificaciones
- Rockers: Cultura Urbana de Los 50'S Y 60'SDocumento14 páginasRockers: Cultura Urbana de Los 50'S Y 60'SLEONARDO RUBIO GOMEZAún no hay calificaciones
- Instrumento de Evaluación Actividades de Asistencia en La Instalación de Servicios de Telecomunicaciones MCR-01-008-18Documento10 páginasInstrumento de Evaluación Actividades de Asistencia en La Instalación de Servicios de Telecomunicaciones MCR-01-008-18Gonzalo CortesAún no hay calificaciones
- IvonneDocumento4 páginasIvonneedgarAún no hay calificaciones
- CEkI Lab04AnalisisDiseñoTransistorBjtDocumento14 páginasCEkI Lab04AnalisisDiseñoTransistorBjtJuanAldairRiveraDueñasAún no hay calificaciones
- 25 Anuncio Entrevistas Pruebas PsicotecnicasDocumento8 páginas25 Anuncio Entrevistas Pruebas PsicotecnicasJoaquín PrivadoAún no hay calificaciones
- Para Profundizar en Familia GZKVoFPDocumento14 páginasPara Profundizar en Familia GZKVoFPEnrique Moya PerezAún no hay calificaciones
- Soy Luna - Búsqueda de GoogleDocumento1 páginaSoy Luna - Búsqueda de GoogleCarolina E. MezaAún no hay calificaciones
- 42 BehringerMXB1002Documento6 páginas42 BehringerMXB1002raan4Aún no hay calificaciones
- Ex. Parcial Ee588 - Fiee UniDocumento5 páginasEx. Parcial Ee588 - Fiee UniDavidAún no hay calificaciones
- Tema Radio, Television y Redes SocialesDocumento15 páginasTema Radio, Television y Redes SocialesadeunitecpruebapruebaAún no hay calificaciones
- Los ZorritosDocumento1 páginaLos ZorritosJUANITA MADRID QUINTEROAún no hay calificaciones
- Coritos en Inglés y EspañolDocumento3 páginasCoritos en Inglés y EspañolPedroAvalosCasango100% (1)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- Confección de cojines y ropa de hogar. TCPF0309De EverandConfección de cojines y ropa de hogar. TCPF0309Aún no hay calificaciones
- UF0513 - Gestión auxiliar de archivo en soporte convencional o informáticoDe EverandUF0513 - Gestión auxiliar de archivo en soporte convencional o informáticoCalificación: 1 de 5 estrellas1/5 (1)
- La biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetDe EverandLa biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetCalificación: 5 de 5 estrellas5/5 (7)
- Prácticas de refrigeración y aire acondicionadoDe EverandPrácticas de refrigeración y aire acondicionadoCalificación: 5 de 5 estrellas5/5 (6)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Lean Startup: Cómo trabajar de manera más inteligente y no más duro mientras se innova más rápido y se satisface a los clientesDe EverandLean Startup: Cómo trabajar de manera más inteligente y no más duro mientras se innova más rápido y se satisface a los clientesCalificación: 4 de 5 estrellas4/5 (8)
- 44 Apps Inteligentes para Ejercitar su Cerebro: Apps Gratuitas, Juegos, y Herramientas para iPhone, iPad, Google Play, Kindle Fire, Navegadores de Internet, Windows Phone, & Apple WatchDe Everand44 Apps Inteligentes para Ejercitar su Cerebro: Apps Gratuitas, Juegos, y Herramientas para iPhone, iPad, Google Play, Kindle Fire, Navegadores de Internet, Windows Phone, & Apple WatchCalificación: 3.5 de 5 estrellas3.5/5 (2)
- Lean: La Guía Fundamental para Lean Startup, Lean Six Sigma, Lean Analytics, Lean Enterprise, Lean Manufacturing, Scrum, Gestión Agile de Proyectos y KanbanDe EverandLean: La Guía Fundamental para Lean Startup, Lean Six Sigma, Lean Analytics, Lean Enterprise, Lean Manufacturing, Scrum, Gestión Agile de Proyectos y KanbanCalificación: 5 de 5 estrellas5/5 (1)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- UF0054: APROVISIONAMIENTO DE MATERIAS PRIMAS EN COCINA (HOTR0108)De EverandUF0054: APROVISIONAMIENTO DE MATERIAS PRIMAS EN COCINA (HOTR0108)Aún no hay calificaciones
- El Método Agile: Lo que Necesita Saber Sobre Gestión de Proyectos Agile, el Proceso Kanban, Pensamiento Lean, y ScrumDe EverandEl Método Agile: Lo que Necesita Saber Sobre Gestión de Proyectos Agile, el Proceso Kanban, Pensamiento Lean, y ScrumCalificación: 5 de 5 estrellas5/5 (1)
- Calidad de Aguas: Usos y AprovechamientoDe EverandCalidad de Aguas: Usos y AprovechamientoCalificación: 5 de 5 estrellas5/5 (1)