También podría gustarte
- Diagonalización de EndomorfismosDocumento53 páginasDiagonalización de EndomorfismosAmIn20122Aún no hay calificaciones
- Problemas Resueltos de Matrices y DeterminantesDocumento10 páginasProblemas Resueltos de Matrices y DeterminantesJ.A VAún no hay calificaciones
- Ejercitario Algebra LinealDocumento2 páginasEjercitario Algebra Linealjjfe012Aún no hay calificaciones
- Algebra Lineal UdeaDocumento17 páginasAlgebra Lineal UdeaLeonel Esteban Dorado PadillaAún no hay calificaciones
- S5 - PPT - Puntos CríticosDocumento20 páginasS5 - PPT - Puntos CríticosDangello SanchezAún no hay calificaciones
- Teorema Cayley Hamilton 2Documento4 páginasTeorema Cayley Hamilton 2Dagoberto de la FuenteAún no hay calificaciones
- Criterios de Convergencia-MatematicaDocumento8 páginasCriterios de Convergencia-MatematicaAnii KarenAún no hay calificaciones
- Criterios de PrimalidadDocumento61 páginasCriterios de Primalidadfezal_08100% (2)
- Unidad I. Parte II - Matematica Aplicada.Documento14 páginasUnidad I. Parte II - Matematica Aplicada.Ramon LopezAún no hay calificaciones
- Taller VI Algebra Lineal IIDocumento2 páginasTaller VI Algebra Lineal IIOscar Alarcon CelyAún no hay calificaciones
- Dominio y Rango de Funciones de Varias VariablesDocumento5 páginasDominio y Rango de Funciones de Varias VariablesReyli LealAún no hay calificaciones
- Edp - 2Documento31 páginasEdp - 2brunoAún no hay calificaciones
- Algebra 2 - Gonzalez, H. - DMCC - MBI - FC - USACH (2012) PDFDocumento102 páginasAlgebra 2 - Gonzalez, H. - DMCC - MBI - FC - USACH (2012) PDFSebastiánArielRochaSalazarAún no hay calificaciones
- SeriesDocumento24 páginasSeriesPablo HernándezAún no hay calificaciones
- 1 Taller Algebra Lineal.Documento2 páginas1 Taller Algebra Lineal.Henry LazaroAún no hay calificaciones
- Antiderivada de Una FunciónDocumento6 páginasAntiderivada de Una FunciónJosé María Palma MorilloAún no hay calificaciones
- El Espacio EuclídeoDocumento20 páginasEl Espacio EuclídeoAmIn20122Aún no hay calificaciones
- Calculo IIIDocumento188 páginasCalculo IIIEve RiosAún no hay calificaciones
- Matemática Ingreso Al Coviello-2016Documento82 páginasMatemática Ingreso Al Coviello-2016prueba1Aún no hay calificaciones
- Taller Links Del Algebra Lineal Iis2!9!39Documento31 páginasTaller Links Del Algebra Lineal Iis2!9!39juan manuel chaves leonAún no hay calificaciones
- Cambio de Base Álgebra LinealDocumento5 páginasCambio de Base Álgebra LinealMaria RamsesAún no hay calificaciones
- Concavidad y Convexidad Grupo 8Documento8 páginasConcavidad y Convexidad Grupo 8Maycol RamirezAún no hay calificaciones
- Análisis MatemáticoDocumento81 páginasAnálisis MatemáticoSekioz de NiafreAún no hay calificaciones
- Elementos Basicos de MATLABDocumento76 páginasElementos Basicos de MATLABYvern TovarAún no hay calificaciones
- Algebra Lineal Problemas Resueltos I GarDocumento138 páginasAlgebra Lineal Problemas Resueltos I GarJuan Pablo Ospina MartinezAún no hay calificaciones
- Análsisi ConvexoDocumento44 páginasAnálsisi ConvexoFernando RodriguezAún no hay calificaciones
- Tema 3. Ejercicios PropuestosDocumento12 páginasTema 3. Ejercicios PropuestosmeimolAún no hay calificaciones
- SUCESIONESDocumento27 páginasSUCESIONESViktor PortoAún no hay calificaciones
- TopologIa de La Recta ARDocumento19 páginasTopologIa de La Recta ARAmIn20122100% (2)
- Cálculo 3: SESIÓN 4: Integrales Dobles. Aplicaciones en Áreas de Regiones Planas y Volúmenes de SólidosDocumento29 páginasCálculo 3: SESIÓN 4: Integrales Dobles. Aplicaciones en Áreas de Regiones Planas y Volúmenes de SólidosAntonio Lunasco MendozaAún no hay calificaciones
- Tarea de Relaciones de EquivalenciaDocumento3 páginasTarea de Relaciones de EquivalenciaGERSSON ANDRE HUICHI SANTANDER100% (1)
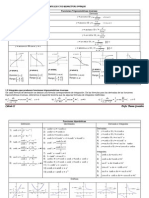
- Funciones Trigonométricas Inversas e HiperbólicasDocumento4 páginasFunciones Trigonométricas Inversas e HiperbólicasDaniel BenítezAún no hay calificaciones
- Series Numericas GranadaDocumento17 páginasSeries Numericas Granadazenit512Aún no hay calificaciones
- Ecuaciones Diferenciales Lineales de Primer OrdenDocumento4 páginasEcuaciones Diferenciales Lineales de Primer Ordenleonardo2994Aún no hay calificaciones
- Guia Mate 5 HumbertoDocumento165 páginasGuia Mate 5 HumbertoCarmen SojoAún no hay calificaciones
- Notas Algebra Moderna Borrador 1 PDFDocumento69 páginasNotas Algebra Moderna Borrador 1 PDFCarolina Guzmán Araujo100% (1)
- CalculoUDEA (R) PDFDocumento463 páginasCalculoUDEA (R) PDFJulio Cesar Salazar TabordaAún no hay calificaciones
- Ejercicios Álgebra LinealDocumento45 páginasEjercicios Álgebra LinealConrado Guirao100% (1)
- Matriz y DeterminanteDocumento9 páginasMatriz y DeterminanteYessica Yarleque Ramirez100% (1)
- Método de Eliminación de GaussDocumento9 páginasMétodo de Eliminación de GaussEstefany OrtegaAún no hay calificaciones
- El Teorema de Karush-Kuhn-TuckerDocumento32 páginasEl Teorema de Karush-Kuhn-TuckerCarbone LuisAún no hay calificaciones
- Taller 01 ALGEBRA LINEALDocumento2 páginasTaller 01 ALGEBRA LINEALLaura Catalina Huérfano PáezAún no hay calificaciones
- Sesión 3 - Funciones TrascendentesDocumento35 páginasSesión 3 - Funciones TrascendentesEduardo Antonio Reyes QuispeAún no hay calificaciones
- Teoria de Conjuntos - RelacionesDocumento26 páginasTeoria de Conjuntos - RelacionesJavier MernesAún no hay calificaciones
- Inecuaciones PolinomicasDocumento1 páginaInecuaciones PolinomicasRossel Williams Ccolqque CcalloAún no hay calificaciones
- Problemario Mecatronica CDIDocumento30 páginasProblemario Mecatronica CDIAline FuentesAún no hay calificaciones
- Matriz Escalonada. Rango de Una MatrizDocumento21 páginasMatriz Escalonada. Rango de Una MatrizMili CutipaAún no hay calificaciones
- Calculo Integral Trabajo Modificado Mil Ocho Mil 1Documento194 páginasCalculo Integral Trabajo Modificado Mil Ocho Mil 1JoseAlexeiAcostaAlvaradoAún no hay calificaciones
- 5 - Prog. No Lineal PDFDocumento23 páginas5 - Prog. No Lineal PDFkalelpg11510% (1)
- ApuntesEDOProf LidiaOrtega PDFDocumento250 páginasApuntesEDOProf LidiaOrtega PDFantonio009gAún no hay calificaciones
- Composición de FuncionesDocumento3 páginasComposición de FuncionesIvan MirandaAún no hay calificaciones
- Convexidad de FuncionesDocumento14 páginasConvexidad de FuncionesVerónica Pérez RojasAún no hay calificaciones
- Espacios MetricosDocumento215 páginasEspacios MetricosGabriel Gpe. Gil SAún no hay calificaciones
- Mate MaticaDocumento206 páginasMate MaticaCarola Gomez100% (1)
- Mmdi U3 Ea CempDocumento9 páginasMmdi U3 Ea CempCesar MorgadoAún no hay calificaciones
- Simulacion 3, Estado SolidoDocumento4 páginasSimulacion 3, Estado SolidolcanasAún no hay calificaciones
- Ejercicios Resueltos (Valores y Vectores Propios)Documento7 páginasEjercicios Resueltos (Valores y Vectores Propios)Chriss GerAún no hay calificaciones
- Calculo de EigenvaloresDocumento15 páginasCalculo de EigenvaloresCarlos FigueroaAún no hay calificaciones
- Polímeros Con Memoria de FormaDocumento13 páginasPolímeros Con Memoria de FormaChavaAguilarAún no hay calificaciones
- Teg ModificadoDocumento34 páginasTeg ModificadoSebastian GirerkfAún no hay calificaciones
- Caso Exitoso Cadena de Suministro de Tesla Motors - Docx-1Documento16 páginasCaso Exitoso Cadena de Suministro de Tesla Motors - Docx-1Juan David Marin Uribe86% (7)
- Material de Vidrio y PorcelanaDocumento26 páginasMaterial de Vidrio y PorcelanaBranEstivenGomezAún no hay calificaciones
- Los Métodos de Investigación Psicológica 2Documento3 páginasLos Métodos de Investigación Psicológica 2Nieves GerardinoAún no hay calificaciones
- Para Una Ética de La Liberación Latinoamericana. Tomo IIDocumento234 páginasPara Una Ética de La Liberación Latinoamericana. Tomo IIRodrigo Miguel Rojas AndradeAún no hay calificaciones
- CanticoDocumento162 páginasCanticololoAún no hay calificaciones
- Hemorragia DigestivaDocumento4 páginasHemorragia DigestivaHeiner VasquezAún no hay calificaciones
- SKL-SP2 Spotcheck MSDS Spanish PDFDocumento3 páginasSKL-SP2 Spotcheck MSDS Spanish PDFJosé Luis Santander VargasAún no hay calificaciones
- EN 059 MurciélagosDocumento3 páginasEN 059 MurciélagosFelix H. Poma AruquipaAún no hay calificaciones
- Textos Lema Mi UtopíaDocumento6 páginasTextos Lema Mi Utopíasmanchado6143Aún no hay calificaciones
- Semana 6 InyectoterapiaDocumento67 páginasSemana 6 InyectoterapiaJOA50% (2)
- Histomonas y HaemoproteusDocumento21 páginasHistomonas y HaemoproteusNinfa MoralesAún no hay calificaciones
- Marco Teórico BioloDocumento4 páginasMarco Teórico BioloshintyAún no hay calificaciones
- Actividad de MatemáticaDocumento8 páginasActividad de MatemáticaEsmeralda Muñoz Gómez100% (1)
- Análisis Del Código de Nomenclatura Velilla Melisa Botánica Marina 04 10 2020 PDFDocumento4 páginasAnálisis Del Código de Nomenclatura Velilla Melisa Botánica Marina 04 10 2020 PDFMelissa VelillaAún no hay calificaciones
- Apuntes Finanzas InternacionalesDocumento33 páginasApuntes Finanzas InternacionalesFernando BecerrilAún no hay calificaciones
- TEMA #02-Poligonal ElectronicaDocumento7 páginasTEMA #02-Poligonal ElectronicaJuanj BauAún no hay calificaciones
- Aeropuerto DenverDocumento10 páginasAeropuerto DenverSharon Elizabeth Huamani MartinezAún no hay calificaciones
- Carpeta de CalculosDocumento12 páginasCarpeta de CalculosIsmael PereiraAún no hay calificaciones
- Plan Anual 4to Primaria Integracion Del NorteDocumento13 páginasPlan Anual 4to Primaria Integracion Del NorteLuis SalinasAún no hay calificaciones
- TDR Forestal CalcaDocumento10 páginasTDR Forestal CalcaWilliams ZevallosAún no hay calificaciones
- Bifurcaciones 019 Editorial PDFDocumento3 páginasBifurcaciones 019 Editorial PDFHeinz Alberti Ortega MachacaAún no hay calificaciones
- Caminos IIDocumento42 páginasCaminos IIEli Vasquez DiazAún no hay calificaciones
- Taxonomía - EtologíaDocumento34 páginasTaxonomía - EtologíaEdgar Jesus Altamar Matoso100% (1)
- Especies Bolivianas de MaderaDocumento12 páginasEspecies Bolivianas de MaderaAntonioRamosSolizAún no hay calificaciones
- Calculo de Asentamiento Inmediato o ElasticoDocumento28 páginasCalculo de Asentamiento Inmediato o ElasticoKlever Saenz Repuello0% (1)
- Principios de La Escuela Histórico-Cultural Liderada Por VygotskyDocumento11 páginasPrincipios de La Escuela Histórico-Cultural Liderada Por VygotskySARAY VEGAAún no hay calificaciones
- SEM 7 Losas LACUDocumento23 páginasSEM 7 Losas LACUMadeleine SAAún no hay calificaciones
- S06.s1 - Material - Medición Del TrabajoDocumento22 páginasS06.s1 - Material - Medición Del TrabajoAlexander Cruz ManriqueAún no hay calificaciones