También podría gustarte
- Plan de Negocio Bisutería en PlataDocumento48 páginasPlan de Negocio Bisutería en PlataWalter Hugo80% (5)
- Catalogo Modernizacion WitturDocumento174 páginasCatalogo Modernizacion Witturalejandrofuentes0% (1)
- Ejemplos y Preguntas de ForwardDocumento2 páginasEjemplos y Preguntas de Forwardmy_love24_10834378% (9)
- Orogénesis y EpirogénesisDocumento14 páginasOrogénesis y EpirogénesisAntonio SolísAún no hay calificaciones
- Clase 1 - Calculo de FajasDocumento31 páginasClase 1 - Calculo de FajasNicolás Torres Valencia100% (1)
- Ingeniería MecanicaDocumento6 páginasIngeniería MecanicaNicolás Torres ValenciaAún no hay calificaciones
- PARCIALDocumento30 páginasPARCIALNicolás Torres Valencia100% (1)
- T3 TZ AvanzadaDocumento2 páginasT3 TZ AvanzadaNicolás Torres ValenciaAún no hay calificaciones
- CLASEPC3Documento211 páginasCLASEPC3Nicolás Torres ValenciaAún no hay calificaciones
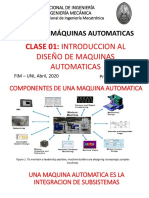
- Clase 01 Introduccion Al DISEÑO DE MAQUINAS AUTOMATICASDocumento14 páginasClase 01 Introduccion Al DISEÑO DE MAQUINAS AUTOMATICASNicolás Torres ValenciaAún no hay calificaciones
- 3 DBC Obra Lpi-Caf San MartinDocumento104 páginas3 DBC Obra Lpi-Caf San Martinalberto escobarAún no hay calificaciones
- 1 Trabajo de Banco.Documento13 páginas1 Trabajo de Banco.Fernando Pinilla JiménezAún no hay calificaciones
- Importancia de Los Activos Intangibles NiifDocumento2 páginasImportancia de Los Activos Intangibles NiifM't ArleydisAún no hay calificaciones
- Trabajo de Grado Actualizado.2.Docx HisDocumento25 páginasTrabajo de Grado Actualizado.2.Docx HisCLAUDIA XIMENA CORTES GUERREROAún no hay calificaciones
- Derecho Laboral en GuatemalaDocumento33 páginasDerecho Laboral en GuatemalaALissa GrijalvaAún no hay calificaciones
- Principios de Economía, Mankiw Capítulo 3 Beneficios Del Comercio Internacional e InterdependenciaDocumento35 páginasPrincipios de Economía, Mankiw Capítulo 3 Beneficios Del Comercio Internacional e InterdependenciaZZhëllii DL ÄNwllAún no hay calificaciones
- Sandra Portillo - Buscar Con GoogleDocumento1 páginaSandra Portillo - Buscar Con GoogleAna Del PradoAún no hay calificaciones
- Po Bar 110 Procedimiento Aplicacion XylanDocumento5 páginasPo Bar 110 Procedimiento Aplicacion XylanSergio Omar FormicaAún no hay calificaciones
- Evaluacion Und 3 Gestion de TalentoDocumento7 páginasEvaluacion Und 3 Gestion de TalentoFredy galarza olayaAún no hay calificaciones
- Brave (Película)Documento5 páginasBrave (Película)Ana Maria Salazar PulgarAún no hay calificaciones
- Padres de La CalidadDocumento5 páginasPadres de La CalidadValery SuarezAún no hay calificaciones
- Obst - Bioestadistica - 07Documento3 páginasObst - Bioestadistica - 07Darian MartinezAún no hay calificaciones
- Demanda Fijacion de PensiónDocumento10 páginasDemanda Fijacion de PensiónMariaGabrielaAún no hay calificaciones
- Diamante VerdeDocumento3 páginasDiamante VerdeCesar Joaquin Garcia DelacruzAún no hay calificaciones
- Control Semana 2 Fundamento Prevencion de RiesgosDocumento5 páginasControl Semana 2 Fundamento Prevencion de RiesgosJaimeAún no hay calificaciones
- Posesion Decenal o Prescripcion Adquisitiva CortaDocumento24 páginasPosesion Decenal o Prescripcion Adquisitiva CortatuteleriaAún no hay calificaciones
- Lineamientos NHESDocumento11 páginasLineamientos NHESAdriana MartínezAún no hay calificaciones
- Megatendencias de La MercadotecniaDocumento3 páginasMegatendencias de La MercadotecniaAdi Sosa75% (4)
- Evidencia 9 Informe Final SPSSDocumento2 páginasEvidencia 9 Informe Final SPSSjhon esapAún no hay calificaciones
- Planeam. y Control Emp. UlimaDocumento8 páginasPlaneam. y Control Emp. UlimaKassandra J. GalvezAún no hay calificaciones
- Tema - 2 - Estructura - Mina (2017)Documento37 páginasTema - 2 - Estructura - Mina (2017)eliasAún no hay calificaciones
- Rhonny - Silva Estad 8docDocumento2 páginasRhonny - Silva Estad 8docRhonny SilvaAún no hay calificaciones
- Curso Mecánica Motores DieselDocumento6 páginasCurso Mecánica Motores DieselDavid CugarAún no hay calificaciones
- EJERCICIOS InteresesDocumento10 páginasEJERCICIOS Interesesfmolina0105Aún no hay calificaciones
- Grupo 6 - Gestión de ProyectosDocumento7 páginasGrupo 6 - Gestión de ProyectosClaudia SeminarioAún no hay calificaciones
- Planeación y Formulación de ProyectosDocumento14 páginasPlaneación y Formulación de ProyectosOxely Rdlr Nrr100% (2)