También podría gustarte
- 21 - Enero-2017 Proyecto Rosy...Documento50 páginas21 - Enero-2017 Proyecto Rosy...Edison YanchaguanoAún no hay calificaciones
- Practica 02Documento2 páginasPractica 02Edison YanchaguanoAún no hay calificaciones
- 1cuestionario de Apoyo para Examen Final de Mecanica de CamionesDocumento2 páginas1cuestionario de Apoyo para Examen Final de Mecanica de CamionesEdison YanchaguanoAún no hay calificaciones
- Tarea 01 BREAKDOWN IN VACUUM RESUMENDocumento4 páginasTarea 01 BREAKDOWN IN VACUUM RESUMENEdison YanchaguanoAún no hay calificaciones
- Practica 02Documento8 páginasPractica 02Edison YanchaguanoAún no hay calificaciones
- Carta CompromisoDocumento3 páginasCarta CompromisoEdison YanchaguanoAún no hay calificaciones
- Contenidos Alto VoltajeDocumento1 páginaContenidos Alto VoltajeEdison YanchaguanoAún no hay calificaciones
- Calidad de EnegiasDocumento2 páginasCalidad de EnegiasEdison YanchaguanoAún no hay calificaciones
- Tarea01 AV Puetate ManchenoDocumento7 páginasTarea01 AV Puetate ManchenoEdison Yanchaguano0% (1)
- Taller01 - FER - Yanchaguano - Llumiquinga (Autoguardado)Documento10 páginasTaller01 - FER - Yanchaguano - Llumiquinga (Autoguardado)Edison YanchaguanoAún no hay calificaciones
- Proyecto Integrador - Analisis de Datos Residencial, Comercial e IndustrialDocumento162 páginasProyecto Integrador - Analisis de Datos Residencial, Comercial e IndustrialEdison YanchaguanoAún no hay calificaciones
- Acta de CompromisoDocumento1 páginaActa de CompromisoEdison YanchaguanoAún no hay calificaciones
- Pregunta 1Documento42 páginasPregunta 1Edison YanchaguanoAún no hay calificaciones
- El Impacto de Las Metodologías de Proyectos en El Éxito Del Proyecto en Diferentes ContextosDocumento18 páginasEl Impacto de Las Metodologías de Proyectos en El Éxito Del Proyecto en Diferentes ContextosDiana ArciniegasAún no hay calificaciones
- Manual de Mantenimiento Eléctrico RJ3iB - Parte III (MARMIBRIA03011S Rev E or B-81505SP04)Documento92 páginasManual de Mantenimiento Eléctrico RJ3iB - Parte III (MARMIBRIA03011S Rev E or B-81505SP04)JavierJBV67% (3)
- 1º - Plan de Mejora y Ampliación MATDocumento64 páginas1º - Plan de Mejora y Ampliación MATPatricia Quirós HuertaAún no hay calificaciones
- Unidad 2 - Aislado y Concentrado ProteicoDocumento12 páginasUnidad 2 - Aislado y Concentrado ProteicoYhonneer LizarasoAún no hay calificaciones
- Tarea Nº4 Lab - Mantenimiento PlantasDocumento12 páginasTarea Nº4 Lab - Mantenimiento PlantasGARY JOAN ACEVEDO CALDERONAún no hay calificaciones
- CRISTALIZACIONESDocumento2 páginasCRISTALIZACIONESNata BarbieriAún no hay calificaciones
- Ejercicios Propuestos Suelos IIDocumento15 páginasEjercicios Propuestos Suelos IIPier Diego H CamAún no hay calificaciones
- Osciladores y CapacitoresDocumento11 páginasOsciladores y CapacitoresDennis Romero0% (1)
- Propuesta de Investigación de MercadosDocumento1 páginaPropuesta de Investigación de MercadosMauricio OrozcoAún no hay calificaciones
- Presentación de PowerPointDocumento7 páginasPresentación de PowerPointEzequiel RivoirAún no hay calificaciones
- Estudio Hidrologico Canal QuilishDocumento25 páginasEstudio Hidrologico Canal QuilishdanielAún no hay calificaciones
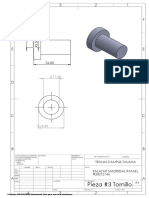
- Pieza #3 TornilloDocumento1 páginaPieza #3 TornilloRAFAEL ARTURO SALAZAR MADRIGALAún no hay calificaciones
- Clase5 1Documento28 páginasClase5 1Juan José Hernandez SalazarAún no hay calificaciones
- FrackingDocumento309 páginasFrackingReynaldo Navia MendozaAún no hay calificaciones
- Gradientes Uniformes 2Documento31 páginasGradientes Uniformes 2kely31Aún no hay calificaciones
- Problemas No 9 Sesion 24Documento14 páginasProblemas No 9 Sesion 24Jose M. GuillermoAún no hay calificaciones
- SESION 6 - Teoria de ErroresDocumento3 páginasSESION 6 - Teoria de ErroresKLIVER ALEXANDER MALDONADO DOLORESAún no hay calificaciones
- Modelos Estocasticos en FinanzasDocumento29 páginasModelos Estocasticos en FinanzasBe DiazAún no hay calificaciones
- SOPORTE DE TOLVA DESING SEPTIEMBRE-Análisis Estático 1-1Documento12 páginasSOPORTE DE TOLVA DESING SEPTIEMBRE-Análisis Estático 1-1Rony Castañeda BenitesAún no hay calificaciones
- Principales Causas de Las Averías NeumáticasDocumento3 páginasPrincipales Causas de Las Averías Neumáticasbrenda tapiaAún no hay calificaciones
- Muest RaDocumento60 páginasMuest Rabismar jaramillo orellanaAún no hay calificaciones
- Ejercicio de Flexion y Corte LB LDocumento8 páginasEjercicio de Flexion y Corte LB Lmike_sanAún no hay calificaciones
- CasapalcaDocumento27 páginasCasapalcapiunki75% (4)
- Cuestionario de Laminado-2Documento2 páginasCuestionario de Laminado-2Misael VicencioAún no hay calificaciones
- Martes 05 de Setiembre MatemaDocumento7 páginasMartes 05 de Setiembre MatemarossmeryAún no hay calificaciones
- E Slide F1 Diseño de Zapatas Aisladas Con SafeDocumento39 páginasE Slide F1 Diseño de Zapatas Aisladas Con SafeMario GutiérrezAún no hay calificaciones
- Comparacion Entre AA e ICP EspañolDocumento8 páginasComparacion Entre AA e ICP EspañolEiner Jesus Quiñones Rios100% (1)
- Trabajo ComplementoDocumento12 páginasTrabajo ComplementohenryAún no hay calificaciones
- Proyecto Final Concreto 2022 Alexis Murillo Solarte Daniel MorenoDocumento43 páginasProyecto Final Concreto 2022 Alexis Murillo Solarte Daniel MorenoDaniel Alejandro Moreno ShaikhAún no hay calificaciones